一、3D相机简介
常见的三维视觉技术,包含双目、ToF、激光三角、结构光等
毫米级:双目、ToF、结构光(散斑)的精度为 mm 级,多见于消费领域,如:导航避障,VR/AR,刷脸支付等
微米级:线激光、结构光(编码)的精度是 um 级,主要应用在工业领域,如:表面缺陷检测、三维测量等
纳米级:另外,还有 nm 级精度的光谱共焦技术,可用于透明材质物体的三维测量
线激光3D相机,是一种基于三角测量原理,通过图像传感器,捕获激光发生器投射在物体表面的激光线信息,重构物体表面轮廓信息的三维相机。
以上文字来源于https://zhuanlan.zhihu.com/p/486516636
线激光3D相机品牌:基恩士keyence 埃尔森LMI 深视SSZN
本文将介绍深视智能的线激光常见问题以及编程方式
二、SSZN线激光
2.1常见问题
触发方式: 连续触发、IO触发、编码器触发
最大速度计算公式:
最大速度 = 细化点数 * 采样频率 * 0.8 * 脉冲当量
扫描长度计算公式:
扫描长度 = 细化点数 * 批处理点数 * 脉冲当量
脉冲当量一般情况下为0.001mm
批处理点数不变的情况下,如何提高扫描速度?
压缩景深,可以提高采样频率
压缩景深z轴范围变小,需要看样品高度是否支持压缩景深,如果样品扫描不全就不能压缩
2.2 SDK接口介绍
#ifndef SR7LINK__H
#define SR7LINK__H
#include <stdio.h>
#ifdef WIN32
#define SR7_IF_API __declspec(dllexport)
#else
#define SR7_IF_API extern
#endif
typedef void * SR7IF_Data;
/// \brief 高速数据通信的回调函数接口.
/// \param pBuffer 指向储存概要数据的缓冲区的指针.
/// \param dwSize 每个单元(行)的字节数量.
/// \param dwCount 存储在pBuffer中的内存的单元数量.
/// \param dwNotify 中断或批量结束等中断的通知.
/// \param dwUser 用户自定义信息.
///
typedef void (*SR7IF_CALLBACK)(char* pBuffer, unsigned int dwSize, unsigned int dwCount, unsigned int dwNotify, unsigned int dwUser);
typedef void (*SR7IF_BatchOneTimeCallBack)(const void *info, const SR7IF_Data *data);
typedef struct {
unsigned char abyIpAddress[4];
} SR7IF_ETHERNET_CONFIG;
#define SR7IF_ERROR_NOT_FOUND (-999) // 功能(相机)不存在.
#define SR7IF_ERROR_COMMAND (-998) // 该命令不支持.
#define SR7IF_ERROR_PARAMETER (-997) // 参数错误.
#define SR7IF_ERROR_UNIMPLEMENTED (-996) // 功能未实现.
#define SR7IF_ERROR_HANDLE (-995) // 句柄无效.
#define SR7IF_ERROR_MEMORY (-994) // 内存(溢出/定义)错误.
#define SR7IF_ERROR_TIMEOUT (-993) // 操作超时.
#define SR7IF_ERROR_DATABUFFER (-992) // 数据大缓冲区不足.
#define SR7IF_ERROR_STREAM (-991) // 数据流错误.
#define SR7IF_ERROR_CLOSED (-990) // 接口关闭不可用.
#define SR7IF_ERROR_VERSION (-989) // 当前版本无效.
#define SR7IF_ERROR_ABORT (-988) // 操作被终止,如连接被关闭、连接中断等.
#define SR7IF_ERROR_ALREADY_EXISTS (-987) // 操作和现有的设置冲突.
#define SR7IF_ERROR_FRAME_LOSS (-986) // 批处理帧丢失.
#define SR7IF_ERROR_ROLL_DATA_OVERFLOW (-985) // 无终止循环批处理出现溢出异常等.
#define SR7IF_ERROR_ROLL_BUSY (-984) // 无终止循环批处理读数据忙.
#define SR7IF_ERROR_MODE (-983) // 当前处理函数与设置的批处理模式有冲突.
#define SR7IF_ERROR_CAMERA_NOT_ONLINE (-982) // 相机(传感头)不在线.
#define SR7IF_ERROR (-1) // 一般性错误,如设置失败、数据获取失败等.
#define SR7IF_NORMAL_STOP (-100) // 正常停止,如外部IO停止批处理操作等.
#define SR7IF_OK (0) // 正确操作.
#ifdef __cplusplus
extern "C" {
#endif
///
/// \brief SR7IF_EthernetOpen 通信连接.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param pEthernetConfig Ethernet 通信设定.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_EthernetOpen(unsigned int lDeviceId, SR7IF_ETHERNET_CONFIG* pEthernetConfig);
///
/// \brief SR7IF_CommClose 断开与相机的连接.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_CommClose(unsigned int lDeviceId);
///
/// \brief SR7IF_SwitchProgram 切换相机配置的参数.重启后不保存配方号.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param No: 任务参数列表编号 0 - 63.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_SwitchProgram(unsigned int lDeviceId, int No);
///
/// \brief SR7IF_GetOnlineCameraB 获取传感头B是否在线
/// \param lDeviceId 设备ID号,范围为0-3.
/// \return
/// <0: -982:传感头B不在线
/// 其他:获取失败
/// =0: 传感头B在线
///
SR7_IF_API int SR7IF_GetOnlineCameraB(unsigned int lDeviceId);
///
/// \brief SR7IF_StartMeasure 开始批处理,立即执行批处理程序.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Timeout 非循环获取时,超时时间(单位ms);循环模式该参数可设置为-1.
/// \return
/// <0: 失败
/// =0: 成功
///
SR7_IF_API int SR7IF_StartMeasure(unsigned int lDeviceId, int Timeout = 50000);
/// \brief SR7IF_StartIOTriggerMeasure 开始批处理,硬件IO触发开始批处理,具体查看硬件手册.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Timeout 非循环获取时,超时时间(单位ms);循环模式该参数可设置为-1.
/// \param restart 预留,设为0.
/// \return
/// <0: 失败
/// =0: 成功
///
SR7_IF_API int SR7IF_StartIOTriggerMeasure(unsigned int lDeviceId, int Timeout = 50000, int restart = 0);
///
/// \brief SR7IF_StopMeasure 停止批处理
/// \param lDeviceId 设备ID号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_StopMeasure(unsigned int lDeviceId);
/// \brief SR7IF_ReceiveData 阻塞方式获取数据.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 返回数据指针.
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_ReceiveData(unsigned int lDeviceId, SR7IF_Data DataObj);
/// \brief SR7IF_ProfilePointSetCount 获取当前批处理设定行数
/// \param lDeviceId 设备ID号,范围为0-3
/// \param DataObj 预留,设置为NULL
/// \return 返回实际批处理行数
///
SR7_IF_API int SR7IF_ProfilePointSetCount(unsigned int lDeviceId, const SR7IF_Data DataObj);
/// \brief SR7IF_ProfilePointCount 获取批处理实际获取行数.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL.
/// \return 返回批处理实际获取行数.
///
SR7_IF_API int SR7IF_ProfilePointCount(unsigned int lDeviceId, const SR7IF_Data DataObj);
/// \brief SR7IF_ProfileDataWidth 获取数据宽度.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL.
/// \return 返回数据宽度(单位像素).
///
SR7_IF_API int SR7IF_ProfileDataWidth(unsigned int lDeviceId, const SR7IF_Data DataObj);
///
/// \brief SR7IF_ProfileData_XPitch 获取数据x方向间距.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL.
/// \return 返回数据x方向间距(mm).
///
SR7_IF_API double SR7IF_ProfileData_XPitch(unsigned int lDeviceId, const SR7IF_Data DataObj);
///
/// \brief SR7IF_GetEncoder 获取编码器值
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Encoder 返回数据指针,双相机为A/B交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetEncoder(unsigned int lDeviceId, const SR7IF_Data DataObj, unsigned int *Encoder);
///
/// \brief SR7IF_GetEncoderContiune 非阻塞方式获取编码器值
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Encoder 返回数据指针,双相机为A/B交替数据
/// \param GetCnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
SR7_IF_API int SR7IF_GetEncoderContiune(unsigned int lDeviceId, const SR7IF_Data DataObj, unsigned int *Encoder, unsigned int GetCnt);
///
/// \brief SR7IF_GetProfileData 阻塞方式获取轮廓数据
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Profile 返回数据指针,双相机为A/B行交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetProfileData(unsigned int lDeviceId, const SR7IF_Data DataObj, int *Profile);
///
/// \brief SR7IF_GetProfileContiuneData 非阻塞方式获取轮廓数据
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Profile 返回数据指针,双相机为A/B行交替数据
/// \param GetCnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
SR7_IF_API int SR7IF_GetProfileContiuneData(unsigned int lDeviceId, const SR7IF_Data DataObj, int *Profile, unsigned int GetCnt);
///
/// \brief SR7IF_GetIntensityData 阻塞方式获取亮度数据
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Intensity 返回数据指针,双相机为A/B行交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetIntensityData(unsigned int lDeviceId, const SR7IF_Data DataObj, unsigned char *Intensity);
///
/// \brief SR7IF_GetIntensityContiuneData 非阻塞获取亮度数据
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Intensity 返回数据指针,双相机为A/B行交替数据
/// \param GetCnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 返回获实际数据行数.
///
SR7_IF_API int SR7IF_GetIntensityContiuneData(unsigned int lDeviceId, const SR7IF_Data DataObj, unsigned char *Intensity, unsigned int GetCnt);
///
/// \brief SR7IF_GetBatchRollData 无终止循环获取数据
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param DataObj 预留,设置为NULL
/// \param Profile 返回轮廓数据指针,双相机为A/B行交替数据
/// \param Intensity 返回亮度数据指针,双相机为A/B行交替数据
/// \param Encoder 返回编码器数据指针,双相机为A/B交替数据
/// \param FrameId 返回帧编号数据指针
/// \param FrameLoss 返回批处理过快掉帧数量数据指针,双相机为A/B交替数据
/// \param GetCnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
SR7_IF_API int SR7IF_GetBatchRollData(unsigned int lDeviceId, const SR7IF_Data DataObj,
int *Profile, unsigned char *Intensity, unsigned int *Encoder, long long *FrameId, unsigned int *FrameLoss,
unsigned int GetCnt);
///
/// \brief SR7IF_GetError 获取系统错误信息
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param pbyErrCnt 返回错误码数量
/// \param pwErrCode 返回错误码指针
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetError(unsigned int lDeviceId, int *pbyErrCnt, int *pwErrCode);
///
/// \brief SR7IF_GetBatchRollError 无终止循环获取数据异常计算值
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param EthErrCnt 返回网络传输导致错误的数量
/// \param UserErrCnt 返回用户获取导致错误的数量
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetBatchRollError(unsigned int lDeviceId, int *EthErrCnt, int *UserErrCnt);
///
/// \brief SR7IF_ClearError 暂无
/// \param lDeviceId
/// \param wErrCode
/// \return
/// <0: 清除失败
/// =0: 成功
///
SR7_IF_API int SR7IF_ClearError(unsigned int lDeviceId, unsigned short wErrCode);
///
/// \brief SR7IF_GetVersion 获取库版本号.
/// \return 返回版本信息.
///
SR7_IF_API const char *SR7IF_GetVersion();
///
/// \brief SR7IF_GetModels 获取相机型号.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \return 返回相机型号字符串.
///
SR7_IF_API const char *SR7IF_GetModels(unsigned int lDeviceId);
///
/// \brief SR7IF_GetHeaderSerial 获取相机头序列号
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Head 0:相机头A 1:相机头B
/// \return
/// !=NULL: 返回相机序列号字符串.
/// =NULL: 失败,相应头不存在或者参数错误.
///
SR7_IF_API const char *SR7IF_GetHeaderSerial(unsigned int lDeviceId, int Head);
/// 高速数据通信相关
///
/// \brief SR7IF_HighSpeedDataEthernetCommunicationInitalize 初始化以太网高速数据通信.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param pEthernetConfig Ethernet 通信设定.
/// \param wHighSpeedPortNo Ethernet 通信端口设定.
/// \param pCallBack 高速通信中数据接收的回调函数.
/// \param dwProfileCnt 回调函数被调用的频率. 范围1-256
/// \param dwThreadId 线程号.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_HighSpeedDataEthernetCommunicationInitalize(unsigned int lDeviceId, SR7IF_ETHERNET_CONFIG* pEthernetConfig, int wHighSpeedPortNo,
SR7IF_CALLBACK pCallBack, unsigned int dwProfileCnt, unsigned int dwThreadId);
///
/// \brief SR7IF_SetOutputPortLevel 设置输出端口电平.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Port 输出端口号,范围为0-7.
/// \param Level 输出电平值.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_SetOutputPortLevel(unsigned int lDeviceId, unsigned int Port, bool Level);
///
/// \brief SR7IF_SetOutputPortLevel 读取输入端口电平.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Port 输入端口号,范围为0-7.
/// \param Level 读取输入电平.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetInputPortLevel(unsigned int lDeviceId, unsigned int Port, bool *Level);
///
/// \brief SR7IF_GetSingleProfile 获取当前一条轮廓(非批处理下,需在EdgeImaging中设置为2.5D模式)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param pProfileData 返回轮廓的指针.
/// \param pEncoder 返回编码器的指针.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetSingleProfile(unsigned int lDeviceId, int *pProfileData, unsigned int *pEncoder);
///
/// \brief SR7IF_SetSetting 参数设定.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Depth 设置的值的级别.
/// \param Type 设置类型.
/// \param Category 设置种类.
/// \param Item 设置项目.
/// \param Target[4] 根据发送 / 接收的设定,可能需要进行相应的指定。无需设定时,指定为 0。
/// \param pData 设置数据.
/// \param DataSize 设置数据的长度.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_SetSetting(unsigned int lDeviceId, int Depth, int Type, int Category, int Item, int Target[4], void *pData, int DataSize);
///
/// \brief SR7IF_GetSetting 参数设定.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Type 获取类型.
/// \param Category 获取种类.
/// \param Item 获取项目.
/// \param Target[4] 根据发送 / 接收的设定,可能需要进行相应的指定。无需设定时,指定为 0。
/// \param pData 获取的数据.
/// \param DataSize 获取数据的长度.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetSetting(unsigned int lDeviceId, int Type, int Category, int Item, int Target[4], void *pData, int DataSize);
///
/// \brief SR7IF_ExportParameters 将系统参数导出,注意只导出当前任务的参数.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param size 返回参数表的大小.
/// \return
/// NULL: 失败.
/// 其他: 成功.
///
SR7_IF_API const char *SR7IF_ExportParameters(unsigned int lDeviceId, unsigned int *size);
///
/// \brief SR7IF_LoadParameters 将导出的参数导入到系统中.
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param pSettingdata 导入参数表指针.
/// \param size 导入参数表的大小.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_LoadParameters(unsigned int lDeviceId, const char *pSettingdata, unsigned int size);
///
/// \brief SR7IF_GetLicenseKey 返回产品剩余天数
/// \param RemainDay 返回剩余天数
/// \return
/// < 0: 失败,参数错误或产品未注册
/// >=0: 成功.
///
SR7_IF_API int SR7IF_GetLicenseKey(unsigned int lDeviceId, unsigned short *RemainDay);
///
/// \brief SR7IF_GetCurrentEncoder 读取当前编码器值
/// \param value 返回编码器值
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetCurrentEncoder(unsigned int lDeviceId, unsigned int *value);
///
/// \brief SR7IF_GetCameraTemperature 读取相机温度,单位0.01摄氏度
/// \param tempA 相机A温度值
/// \param tempB 相机B温度值
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_GetCameraTemperature(unsigned int lDeviceId, unsigned int *tempA, unsigned int *tempB);
//
typedef struct {
int xPoints; //x方向数据数量
int BatchPoints; //批处理数量
unsigned int BatchTimes; //批处理次数
double xPixth; //x方向点间距
unsigned int startEncoder; //批处理开始编码器值
int HeadNumber; //相机头数量
int returnStatus; //SR7IF_OK:正常批处理
//SR7IF_NORMAL_STOP
//SR7IF_ERROR_ABORT
//SR7IF_ERROR_CLOSED
} SR7IF_STR_CALLBACK_INFO;
///
/// \brief SR7IF_SetBatchOneTimeDataHandler 设置回调函数,建议获取数据后另外开启线程进行处理(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param CallFunc 回调函数.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_SetBatchOneTimeDataHandler(unsigned int lDeviceId, SR7IF_BatchOneTimeCallBack CallFunc);
///
/// \brief SR7IF_StartMeasureWithCallback 开始批处理(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param ImmediateBatch 0:立即开始批处理 1:等待外部开始批处理.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_StartMeasureWithCallback(int iDeviceId, int ImmediateBatch);
///
/// \brief SR7IF_TriggerOneBatch 批处理软件触发开始(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
SR7_IF_API int SR7IF_TriggerOneBatch(int iDeviceId);
///
/// \brief SR7IF_GetBatchProfilePoint 批处理轮廓获取(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Head 0:相机头A 1:相机头B
/// \return
/// !=NULL: 返回数据指针
/// =NULL: 失败,无数据或者相应头不存在.
///
SR7_IF_API const int *SR7IF_GetBatchProfilePoint(const SR7IF_Data *DataIndex, int Head);
///
/// \brief SR7IF_GetBatchIntensityPoint 批处理亮度获取(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Head 0:相机头A 1:相机头B
/// \return
/// !=NULL: 返回数据指针
/// =NULL: 失败,无数据或者相应头不存在.
///
SR7_IF_API const unsigned char *SR7IF_GetBatchIntensityPoint(const SR7IF_Data *DataIndex, int Head);
///
/// \brief SR7IF_GetBatchEncoderPoint 批处理编码器获取(获取数据模式:批处理一次回调一次)
/// \param lDeviceId 设备ID号,范围为0-3.
/// \param Head 0:相机头A 1:相机头B
/// \return
/// !=NULL: 返回数据指针
/// =NULL: 失败,无数据或者相应头不存在.
///
SR7_IF_API const unsigned int *SR7IF_GetBatchEncoderPoint(const SR7IF_Data *DataIndex, int Head);
#ifdef __cplusplus
}
#endif
#endif //SR7LINK__H
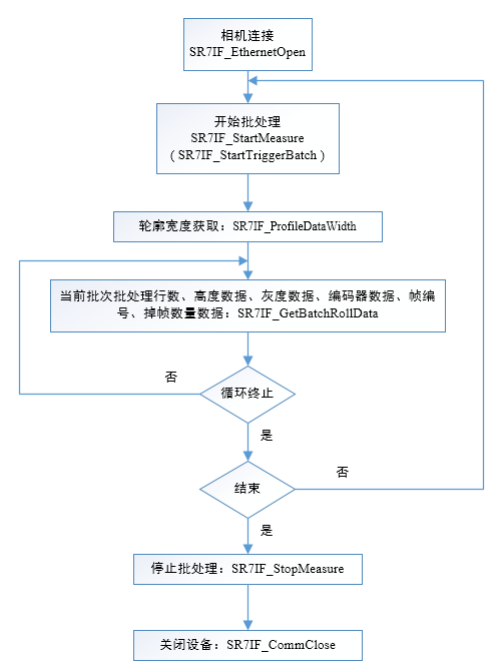
2.3 使用流程
阻塞方式获取数据
2.4 qt中编程
设计简易界面
pro文件链接SDK
SR_THIRD_PARTY_PATH = $$PWD/3rdparty/SR_SdkDll
# SR7Link
win32 {
CONFIG(release, debug|release) {
LIBS += -L$$SR_THIRD_PARTY_PATH/x64/ -lSR7Link
}else {
LIBS += -L$$SR_THIRD_PARTY_PATH/x64/ -lSR7Link
}
}
INCLUDEPATH += $$SR_THIRD_PARTY_PATH/include
DEPENDPATH += $$SR_THIRD_PARTY_PATH/include调用代码
#include "MainWindow.h"
#include "ui_MainWindow.h"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
const int DEVICE_ID = 0;
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
SR7IF_ETHERNET_CONFIG SREthernetConFig;
SREthernetConFig.abyIpAddress[0] = 192;
SREthernetConFig.abyIpAddress[1] = 168;
SREthernetConFig.abyIpAddress[2] = 0;
SREthernetConFig.abyIpAddress[3] = 10;
int ret = SR7IF_EthernetOpen(DEVICE_ID, &SREthernetConFig);
ui->textBrowser->append(tr("SR7IF_EthernetOpen ret:%1").arg(ret));
}
MainWindow::~MainWindow()
{
int ret = SR7IF_CommClose(DEVICE_ID);
ui->textBrowser->append(tr("SR7IF_CommClose ret:%1").arg(ret));
delete ui;
}
void MainWindow::on_btnStartMeasure_clicked()
{
int ret = SR7IF_StartMeasure(DEVICE_ID, 50 * 1000);
ui->textBrowser->append(tr("SR7IF_StartMeasure ret:%1").arg(ret));
}
void MainWindow::on_btnReceiveData_clicked()
{
int ret = SR7IF_ReceiveData(DEVICE_ID, DataObject);
ui->textBrowser->append(tr("SR7IF_ReceiveData ret:%1").arg(ret));
}
void MainWindow::on_btnGetData_clicked()
{
int BatchPoint = SR7IF_ProfilePointCount(DEVICE_ID, DataObject);
int m_DataWidth = SR7IF_ProfileDataWidth(DEVICE_ID, DataObject);
ui->textBrowser->append(tr("BatchPoint:%1 DataWidth:%2").arg(BatchPoint).arg(m_DataWidth));
int *HeightData = new int[BatchPoint * m_DataWidth];
int ret = SR7IF_GetProfileData(DEVICE_ID, DataObject, HeightData);
ui->textBrowser->append(tr("SR7IF_GetProfileData ret:%1").arg(ret));
unsigned char *grayData = new unsigned char[BatchPoint * m_DataWidth];
ret = SR7IF_GetIntensityData(DEVICE_ID, DataObject, grayData);
ui->textBrowser->append(tr("SR7IF_GetIntensityData ret:%1").arg(ret));
unsigned int *Encoder = new unsigned int[BatchPoint];
ret = SR7IF_GetEncoder(DEVICE_ID, DataObject, Encoder);
ui->textBrowser->append(tr("SR7IF_GetEncoder ret:%1").arg(ret));
cv::Mat grayMat = cv::Mat(BatchPoint, m_DataWidth, CV_8UC1, grayData);
cv::imwrite("grayMat.bmp", grayMat);
// cv::flip(grayMat, grayMat, 0);
delete[] HeightData;
delete[] grayData;
delete[] Encoder;
}
void MainWindow::on_btnStopMeasure_clicked()
{
int ret = SR7IF_StopMeasure(DEVICE_ID);
}