文 | BFT机器人
在科技日新月异的今天,我们期望机器能够胜任的任务愈发复杂且多变。无论是为失去肢体的人提供动力的假肢,还是那些独立在外部世界自由穿梭的机器人,它们都需要在多种场景下展现出卓越的行动能力。
然而传统的标准电动机,其设计初衷多为应对稳定、持续的工作状态,如驱动压缩机或旋转传送带,即便有更新型的电动机设计,当面对更为复杂多变的动作时,它们依然会消耗大量的能量。

弹簧和离合器的巧妙结合
斯坦福大学的研究团队却打破了这一局限,他们成功研发出一种电动机的增强方法。通过一种新型致动器(一种利用能量使物体运动的装置)的运用,这种电动机在执行动态任务时展现出前所未有的高效性。这种致动器能够巧妙地利用弹簧和离合器的结合,完成各类任务,并且其所消耗的能源远低于传统电动机。
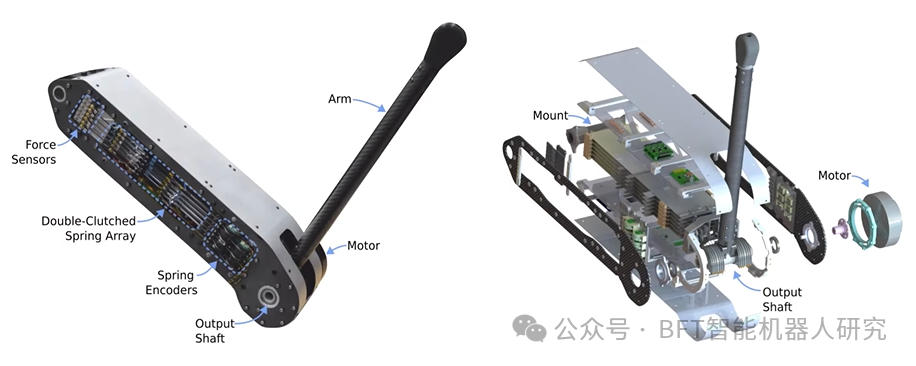
执行器的工作原理在于它巧妙地利用了弹簧的力学特性。弹簧在未被施加外力时,总是力图恢复到它的自然状态,这种内在的反弹力是执行器发挥作用的关键。想象一下,当执行器需要降低重物时,研究人员如同魔术般接合弹簧,让它缓缓地伸展,从而巧妙地分担了电机的一部分承重任务。更神奇的是,通过将弹簧锁定在伸展状态,就像把能量储存在一个隐形的能量库中,等待时机来协助电机完成下一项挑战。
而在这背后,一系列电粘离合器默默扮演着至关重要的角色。这些离合器就像精巧的开关,负责快速而准确地接合和松开弹簧。每个橡胶弹簧都被巧妙地夹在两个离合器之间,一个离合器负责将弹簧与关节相连,助力电机;另一个离合器则在不使用时,将弹簧牢牢锁定在伸展位置,防止能量流失。
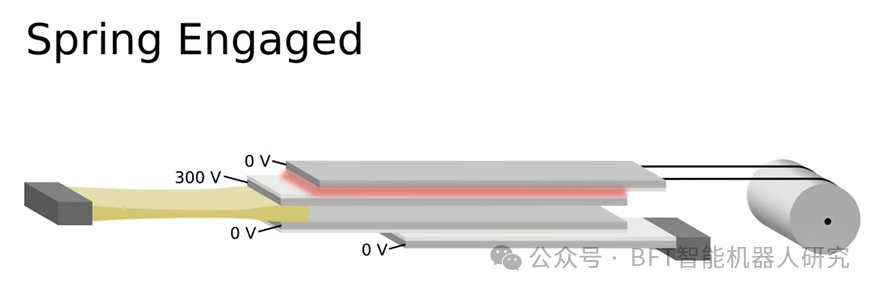

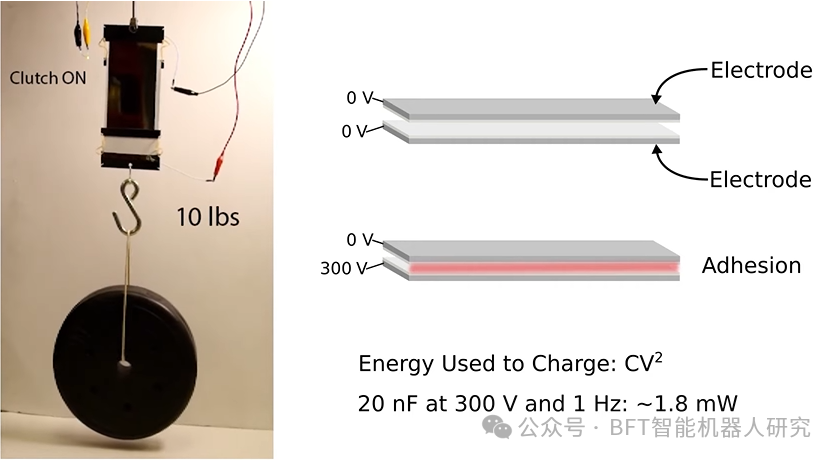
这些离合器由两个电极构成,一个与弹簧相连,一个与框架或电机相连。当它们处于休眠状态时,它们能够如丝般顺滑地相互滑过,互不干扰。一旦研究人员决定接合离合器,他们只需对其中一个电极施加高电压。这时两个电极就像被磁力吸引一般,迅速靠近并发出清脆的咔嗒声。而释放弹簧的过程,同样简单而高效,只需将电极接地,将其电压降至零即可。
研究人员为执行器装备了一个电机,并巧妙地增加了六个相同的离合器弹簧,这些弹簧可以根据需要自由组合。为了验证其性能,他们进行了一系列极具挑战性的运动测试,包括快速加速、负载不断变化以及平稳稳定的运动。而结果令人振奋,在每一项任务中,增强型电机的功耗都至少比标准电机低50%,而在最佳情况下,功耗竟然降低了惊人的97%!
可以做更多事情的电机
有了这更高效能的电机,机器人能够完成更多艰巨的任务,以往可能只能持续工作一两个小时便需要充电,而现在它们可以整日奔忙。这样的转变,让机器人得以承担更为复杂、更有意义的使命,从而极大地拓宽了它们的应用领域。
对于那些涉及有毒材料、危险环境或其他高风险的情况,可以派遣机器人去执行,以避免人员受伤的风险。机器人的存在,让我们在面对这些挑战时,有了更加安全、可靠的解决方案。

目前尽管执行器的控制器还需要几分钟的时间来计算使用弹簧组合完成新任务的最优方案,但研究人员对此充满了信心。他们正计划通过引入人工智能和机器学习技术,来大大缩短这一时间。他们设想构建一个能够从过往任务中学习的系统,通过不断积累经验和数据,形成一个日益丰富的运动数据库。这样,机器人便能更加直观、高效地掌握新技能,从而更好地适应各种复杂多变的环境。相信在不久的将来,这项技术将会为机器人产业带来更多的惊喜和突破。
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。