背景
为了显示结构光重建后的点云,开发QT5.14.0+VTK9.2.0的上位机软件,用于对结构光3D相机进行控制,并接收传输回来的3D数据,显示在窗口中。
配置QT和VTK
VTK9.2.0下载源码,用Cmake编译,编译好的VTK9.2.0-vs2017在链接中:VTK9.2.0-vs2017编译工程
QT5.14.0下载链接
VTK绘制点云
VTK构造显示数据的基本流程是:
Point -> Cell -> Poly -> PolyMapper -> Actor -> Renderer -> QVTKOpenGLNativeWidget
其中,
⋅
\cdot
⋅ vtkPoints类对应创建点数据,包含点的坐标,以及属性
⋅
\cdot
⋅ vtkCellArray类是构造一种元素,比如三角网格,对应有三个point,那么一个cell中就会存储这三个point的索引值
⋅
\cdot
⋅ vtkPolyData类是构造多边形元素
⋅
\cdot
⋅ vtkActor类是构造“演员”
⋅
\cdot
⋅ vtkRenderer类是构造着色器,理解为渲染场景的控制,包含“演员”、光源、背景等
⋅
\cdot
⋅ vtkPolyDataMapper类将多边形元素和Actor建立联系
⋅
\cdot
⋅ QVTKOpenGLNativeWidget类是渲染窗口控件
在qt中创建VTK渲染窗口控件有两种方式:
① 双击工程左侧.ui文件,在qt designer中创建ui.openGLWidget对象
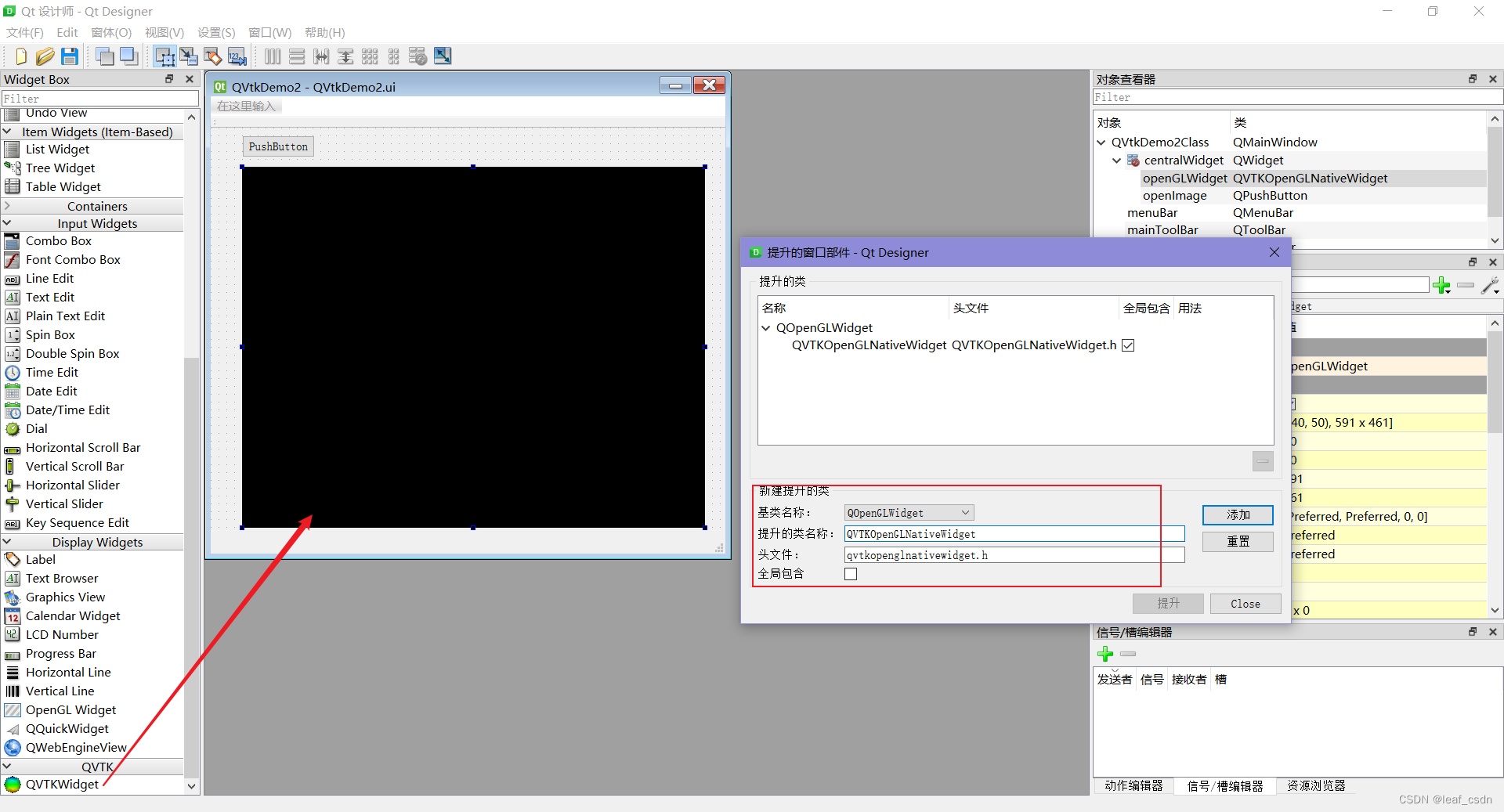
ui.openGLWidget是通过qt designer,拖入QVTKWidget控件,右键该控件选择“提升窗口部件”,基类选择QOpenGLWidget, 提升的类名称为QVTKOpenGLNativeWidget, 在右上角的对象查看器中,重命名为openGLWidget. (注意:VTK8的创建方式是不一样的,注意版本)
② 方法二是直接用代码生成的方式,在工程的构造函数中直接new一个QVTKOpenGLNativeWidget对象,并设置其位置信息
QVtkDemo2::QVtkDemo2(QWidget *parent)
: QMainWindow(parent)
{
ui.setupUi(this);
//new一个QVTKOpenGLNativeWidget的对象
ui.openGLWidget = new QVTKOpenGLNativeWidget(this);
//设置渲染窗口的尺寸
ui.openGLWidget->resize(100, 100);
//设置左上角的在主窗口中的坐标
ui.openGLWidget->move(50, 50);
testVtk3D();
}
构造一个testVtk3D函数,用于绘制点云,并使用vtkCameraOrientationWidget类创建一个坐标轴对象,由于testVtk3D在构造函数中调用,需要在头文件中将其定义为全局变量。另外,VTK使用的是智能指针vtkSmartPointer,无需管理其释放问题,VTK还提供vtkNew类的智能指针,
vtkSmartPointer与vtkNew两者主要的使用区别在于:前者多用于全局变量,后者多用于局部变量
//在头文件中定义为全局变量
vtkSmartPointer<vtkCameraOrientationWidget> cameraOrientationWidget;
void QVtkDemo2::testVtk3D()
{
//创建着色器对象
vtkSmartPointer<vtkRenderer> g_vtkRenderer = vtkSmartPointer<vtkRenderer>::New();
//设置背景颜色
g_vtkRenderer->SetBackground(.1, .2, .4);
//创建point对象
vtkSmartPointer<vtkPoints> g_vtkPoints = vtkSmartPointer<vtkPoints>::New();
//创建cell对象
vtkSmartPointer<vtkCellArray> g_vtkVertices = vtkSmartPointer<vtkCellArray>::New();
vtkIdType id[1];
//随机生成200个点
for (int i = 0; i < 200; i++)
{
float x = rand() % 10;
float y = rand() % 10;
float z = rand() % 10;
id[0] = g_vtkPoints->InsertNextPoint(x, y, z);
g_vtkVertices->InsertNextCell(1, id);
}
//创建poly对象
vtkSmartPointer<vtkPolyData> g_vtkpolyData = vtkSmartPointer<vtkPolyData>::New();
g_vtkpolyData->SetPoints(g_vtkPoints);
g_vtkpolyData->SetVerts(g_vtkVertices);
//创建polyMapper
vtkSmartPointer<vtkPolyDataMapper> g_vtkpointsMapper = vtkSmartPointer<vtkPolyDataMapper>::New();
g_vtkpointsMapper->SetInputData(g_vtkpolyData);
//创建Actor
vtkSmartPointer<vtkActor> g_vtkpointsActor = vtkSmartPointer<vtkActor>::New();
g_vtkpointsActor->SetMapper(g_vtkpointsMapper);
g_vtkpointsActor->GetProperty()->SetPointSize(3);//设置点的大小
g_vtkRenderer->AddActor(g_vtkpointsActor);
//根据点云的包围盒,寻找最佳的显示视点位置
g_vtkRenderer->ResetCamera();
//ui中的绘制窗口添加定义的着色器
ui.openGLWidget->renderWindow()->AddRenderer(g_vtkRenderer);
//开始三维渲染
ui.openGLWidget->renderWindow()->Render();
//绘制坐标轴
cameraOrientationWidget = vtkSmartPointer<vtkCameraOrientationWidget>::New();
cameraOrientationWidget->SetInteractor(ui.openGLWidget->interactor());
cameraOrientationWidget->SetParentRenderer(g_vtkRenderer);
cameraOrientationWidget->SetEnabled(1);
return;
}
运行效果如下图

VTK根据Z值绘制点云颜色
void QVtkDemo2::testVtk3D()
{
//创建着色器对象
vtkSmartPointer<vtkRenderer> g_vtkRenderer = vtkSmartPointer<vtkRenderer>::New();
//设置背景颜色
g_vtkRenderer->SetBackground(.1, .2, .4);
//创建point对象
vtkSmartPointer<vtkPoints> g_vtkPoints = vtkSmartPointer<vtkPoints>::New();
g_vtkPoints->SetNumberOfPoints(200);
//创建cell对象
vtkSmartPointer<vtkCellArray> g_vtkVertices = vtkSmartPointer<vtkCellArray>::New();
vtkIdType id[1];
//随机生成200个点
float minz = VTK_FLOAT_MAX, maxz = VTK_FLOAT_MIN;
for (int i = 0; i < 200; i++)
{
float x = rand() % 10;
float y = rand() % 10;
float z = rand() % 10;
//提前申请了points的数量,使用set比insert速度更快
g_vtkPoints->SetPoint(i, x, y, z);
id[0] = i;
g_vtkVertices->InsertNextCell(1, id);
if (z > maxz)
{
maxz = z;
}
if (z < minz)
{
minz = z;
}
}
//创建poly对象
vtkSmartPointer<vtkPolyData> g_vtkpolyData = vtkSmartPointer<vtkPolyData>::New();
g_vtkpolyData->SetPoints(g_vtkPoints);
g_vtkpolyData->SetVerts(g_vtkVertices);
vtkSmartPointer<vtkVertexGlyphFilter> g_glyphFilter = vtkSmartPointer<vtkVertexGlyphFilter>::New();
g_glyphFilter->SetInputData(g_vtkpolyData);
g_glyphFilter->Update();
vtkSmartPointer<vtkElevationFilter> g_elevationFilter = vtkSmartPointer<vtkElevationFilter>::New();
g_elevationFilter->SetInputConnection(g_glyphFilter->GetOutputPort());
g_elevationFilter->SetLowPoint(0, 0, minz);
g_elevationFilter->SetHighPoint(0, 0, maxz);
//创建polyMapper
vtkSmartPointer<vtkPolyDataMapper> g_vtkpointsMapper = vtkSmartPointer<vtkPolyDataMapper>::New();
g_vtkpointsMapper->SetInputConnection(g_elevationFilter->GetOutputPort());
//创建Actor
vtkSmartPointer<vtkActor> g_vtkpointsActor = vtkSmartPointer<vtkActor>::New();
g_vtkpointsActor->SetMapper(g_vtkpointsMapper);
g_vtkpointsActor->GetProperty()->SetPointSize(3);//设置点的大小
g_vtkRenderer->AddActor(g_vtkpointsActor);
//建立查找表,将Z深度映射为一个查找表,表的值对应不同的颜色
vtkNew<vtkLookupTable> lut = vtkNew<vtkLookupTable>::vtkNew();
lut->SetNumberOfTableValues(7);
lut->SetHueRange(0.0, 0.67); //这里是红到蓝,设置<0.67,1>为蓝到红
lut->SetTableRange(minz, maxz);
lut->Build();
//创建色谱栏
vtkNew<vtkScalarBarActor> colorBar = vtkNew<vtkScalarBarActor>::vtkNew();
colorBar->SetLookupTable(lut);
colorBar->SetNumberOfLabels(7);
colorBar->SetBarRatio(0.10);
colorBar->SetUnconstrainedFontSize(0.05);
colorBar->SetMaximumHeightInPixels(100);
colorBar->SetDisplayPosition(500, 80);
g_vtkRenderer->AddActor2D(colorBar);
//根据点云的包围盒,寻找最佳的显示视点位置
g_vtkRenderer->ResetCamera();
//ui中的绘制窗口添加定义的着色器
ui.openGLWidget->renderWindow()->AddRenderer(g_vtkRenderer);
//开始三维渲染
ui.openGLWidget->renderWindow()->Render();
//绘制坐标轴
cameraOrientationWidget = vtkSmartPointer<vtkCameraOrientationWidget>::New();
cameraOrientationWidget->SetInteractor(ui.openGLWidget->interactor());
cameraOrientationWidget->SetParentRenderer(g_vtkRenderer);
cameraOrientationWidget->SetEnabled(1);
return;
}

VTK赋予点云真实纹理信息(灰度\彩色)
这个功能的需要,是因为重建点云是一个“白模”或像上一节中的深度颜色映射图一样,有时候会需要点云贴上相机拍摄的灰度纹理或彩色纹理。下面的代码中,我定义了vtkUnsignedCharArray的指针,对256个点,分别赋予了一个颜色,R=G=B的情况就是灰度。由此,可实现点云真实纹理的显示。
void QVtkDemo2::testVtk3D()
{
//创建着色器对象
vtkSmartPointer<vtkRenderer> g_vtkRenderer = vtkSmartPointer<vtkRenderer>::New();
//设置背景颜色
g_vtkRenderer->SetBackground(.1, .2, .4);
//创建point对象
vtkSmartPointer<vtkPoints> g_vtkPoints = vtkSmartPointer<vtkPoints>::New();
g_vtkPoints->SetNumberOfPoints(256);
//创建cell对象
vtkSmartPointer<vtkCellArray> g_vtkVertices = vtkSmartPointer<vtkCellArray>::New();
vtkIdType id[1];
vtkSmartPointer<vtkUnsignedCharArray> ptColor = vtkSmartPointer<vtkUnsignedCharArray>::New();
ptColor->SetNumberOfTuples(256);
ptColor->SetNumberOfComponents(3);
//随机生成256个点, 每个点一个灰度值
float minz = VTK_FLOAT_MAX, maxz = VTK_FLOAT_MIN;
for (int i = 0; i < 256; i++)
{
float x = rand() % 10;
float y = rand() % 10;
float z = rand() % 10;
//提前申请了points的数量,使用set比insert速度更快
g_vtkPoints->SetPoint(i, x, y, z);
id[0] = i;
g_vtkVertices->InsertNextCell(1, id);
//赋予每一个点一个RGB值,R=G=B显示灰度,根据需要修改程序
unsigned char rgb[3];
rgb[0] = i;
rgb[1] = i;
rgb[2] = i;
ptColor->InsertTypedTuple(i, rgb);
}
//创建poly对象
vtkSmartPointer<vtkPolyData> g_vtkpolyData = vtkSmartPointer<vtkPolyData>::New();
g_vtkpolyData->SetPoints(g_vtkPoints);
g_vtkpolyData->SetVerts(g_vtkVertices);
g_vtkpolyData->GetPointData()->SetScalars(ptColor);
//创建polyMapper
vtkSmartPointer<vtkPolyDataMapper> g_vtkpointsMapper = vtkSmartPointer<vtkPolyDataMapper>::New();
g_vtkpointsMapper->SetInputData(g_vtkpolyData);
//创建Actor
vtkSmartPointer<vtkActor> g_vtkpointsActor = vtkSmartPointer<vtkActor>::New();
g_vtkpointsActor->SetMapper(g_vtkpointsMapper);
g_vtkpointsActor->GetProperty()->SetPointSize(3);//设置点的大小
g_vtkRenderer->AddActor(g_vtkpointsActor);
//根据点云的包围盒,寻找最佳的显示视点位置
g_vtkRenderer->ResetCamera();
//ui中的绘制窗口添加定义的着色器
ui.openGLWidget->renderWindow()->AddRenderer(g_vtkRenderer);
//开始三维渲染
ui.openGLWidget->renderWindow()->Render();
//绘制坐标轴
cameraOrientationWidget = vtkSmartPointer<vtkCameraOrientationWidget>::New();
cameraOrientationWidget->SetInteractor(ui.openGLWidget->interactor());
cameraOrientationWidget->SetParentRenderer(g_vtkRenderer);
cameraOrientationWidget->SetEnabled(1);
return;
}

petal_20240322_142336