讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文末正下方中心提供了本人
联系方式,
点击本人照片即可显示
W
X
→
官方认证
{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}
文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言(Scan match原理)
通过前面你的一系列博客,已经知道 Cartographer 中的概率栅格图是如何建立的了。不过需要注意的一点是该地图并不仅仅是保存下来给来看的,其还会被点云扫描匹配使用到,点云扫描匹配目的是估算位姿(该部分内容后面会详细讲解)。在 slam 中分为 Scan match 与 Point cloud match,通常情况下前者指的就是2D扫描匹配,后者指的是3D点云匹配。为了方便后续代码的理解,这里简单介绍一下扫描匹配的原理,先来看下图(理想位姿):

1、方格 → 所有的栅格组成。
2、黑色方格 → 障碍物,光子会被阻碍,形成点云数据。
3、白色方格 → 空闲区域,表示没有障碍物,光子可以直接穿过。
4、紫色多边形 → 代表机器人,当然也可以理解为雷达传感器原点,或者点云数据的原点。
5、黄色圆形 → 点云数据。
从上图来看,可见所有的点云数据都与障碍物重叠了,说明此时估算出来的位姿十分正确,这里称为理想位置。但是系统在运行的过程中并非是这样的。这里假设我们由传感器数据(Imu、GPS、里程计) 等估算出来的位姿如下所示:

根据图示可以看出初始位姿与理想位姿在位置与姿态上都存在差异,也就是说由初始位姿变换到理想位姿,其平移与旋转可能都需要发生改变。基于这个原理,最简单的一种扫描方式就是暴力匹配,也就是在位移与角度上维度上进行遍历,流程如下:
1、设定初始位姿
2、位移扫描匹配遍历
3、角度扫描匹配遍历。
4、评分规则
初始位姿可以直接由传感器估算出来,先来看下图,
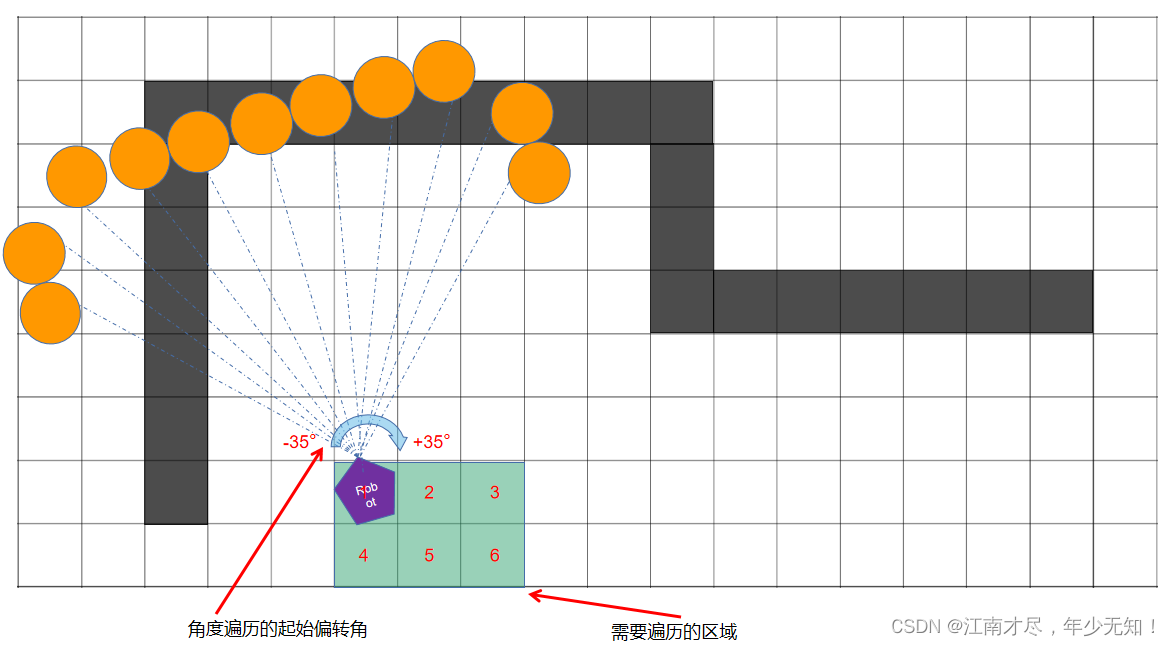
绿色区域 1-6 表示需要遍历的区域,也就是理想位姿的平移处于该区域内,也就是位移扫描匹配需要遍历绿色区域1-6。蓝色的箭头表示角度遍历的方向。该箭头的起点就是角度开始遍历的起点,终点就是角度遍历的终点。
如上图所示,从1号区域