今天小编就来继续学习与使用步行电机的学习,如果位置对你有帮助,评论收藏,点赞一下
步进电机驱动器
步进电机驱动器是一种专用于控制步进电机的电子设备,用于控制步进电机的转动和位置。步进电机是一种将电信号转换为机械运动的电动机,其运转是通过逐步地施加电脉冲信号来实现的,每一个脉冲信号会使步进电机转动一个固定的步长角度,因此称为“步进”电机。步进电机驱动器负责管理和控制这些电脉冲信号,以精确控制步进电机的速度、方向和位置。
二相四线电机图
二相四线电机通常指的是步进电机的一种类型。它具有两组线圈(两相),每组线圈各自连接两条导线,因此总共有四条导线。这种电机可以通过按顺序施加电流来使两组线圈交替通电,从而产生旋转运动。通过适时地切换电流的方向和大小,可以精确地控制电机的转动,实现精准的位置控制。
-
步距角(Step Angle):指每次接收一个脉冲信号时电机转动的角度,通常以度(°)表示。步距角决定了电机的旋转精度和位置控制的分辨率。
-
额定电流(Rated Current):指电机正常工作时的电流值,以安培(A)为单位。额定电流是保证电机正常运行的重要参数。
-
额定电压(Rated Voltage):表示电机正常工作时的电压值,以伏特(V)为单位。电机的额定电压决定了电机的功率输出和速度性能。
-
力矩:在电机工作时,输入的电流会在电机内部产生磁场,导致转子受到磁力的作用而转动,从而产生力矩,驱动负载旋转。在二相四线电机中,力矩通常与电机的设计、结构、电流大小、步距角等因素密切相关。通过控制电流大小和方向,可以调节电机的力矩大小,实现对负载的精准控制。
(如下图:电流5.6A是额定电流,步距角1.8°,接线A+与A-是一个线圈,B+与B-是一个线圈)
可以求得电机转一圈:360除以1.8=200(个)所以电机转一圈需要200个脉冲。

驱动器接线图
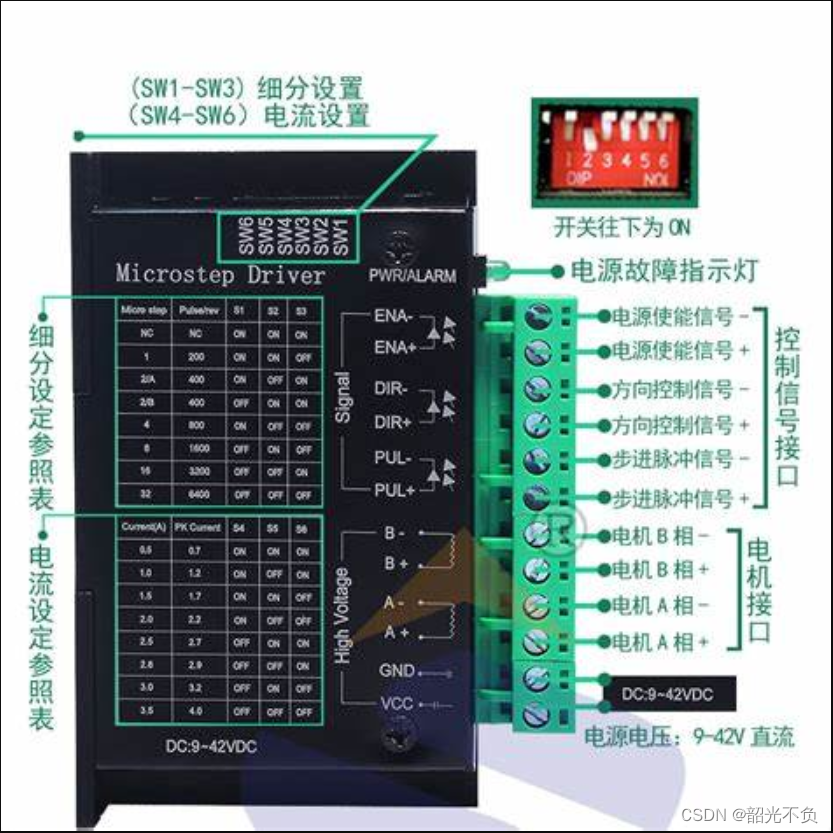
通常情况下A相与B相的线圈并没有固定接法,但是必须一个线圈接一相,(A+和A-对应的是同一个线圈,不能一个线圈正接A+负接B-)。
ENA+ ,DIR+,PUL+接电源正机 ENA-,DIR-,PUL-接plc的输出点上。(在三菱plc中使用负极输出)
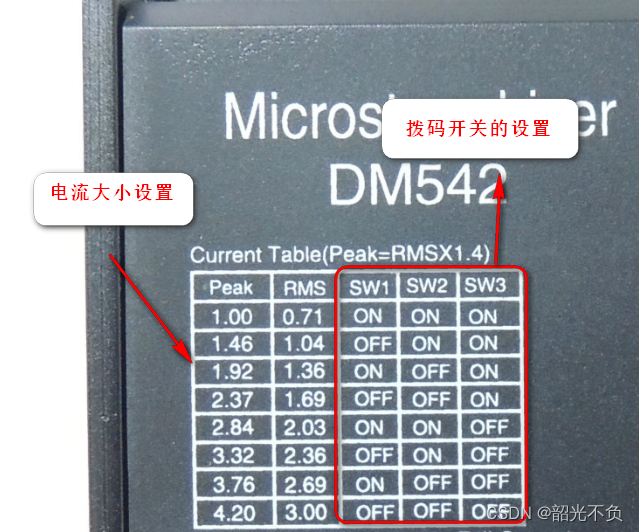
电流设定参照表设置(如下图。控制S1,S2,S3 拨码向上为off,PEAK峰值电流,RMS均值电流)
设置动态电流,1.46A 就需要1向上,2,3向下。

细分设定参照表设置(如上图。控制S5,S6,S7,S8)
如果:步距角为1.8°时,200个脉冲电机运转一周,想要转0.9°时,就可以细分设置为400.。

步进电机程序
三菱PLSY(16位连续执行时脉冲输出指令)
执行条件-------------------------------------------------------------PLSY S1 S2 D
S1:脉冲频率(控制电机转速快慢)
S2:脉冲发出个数
D:指定脉冲输出点的Y的编号

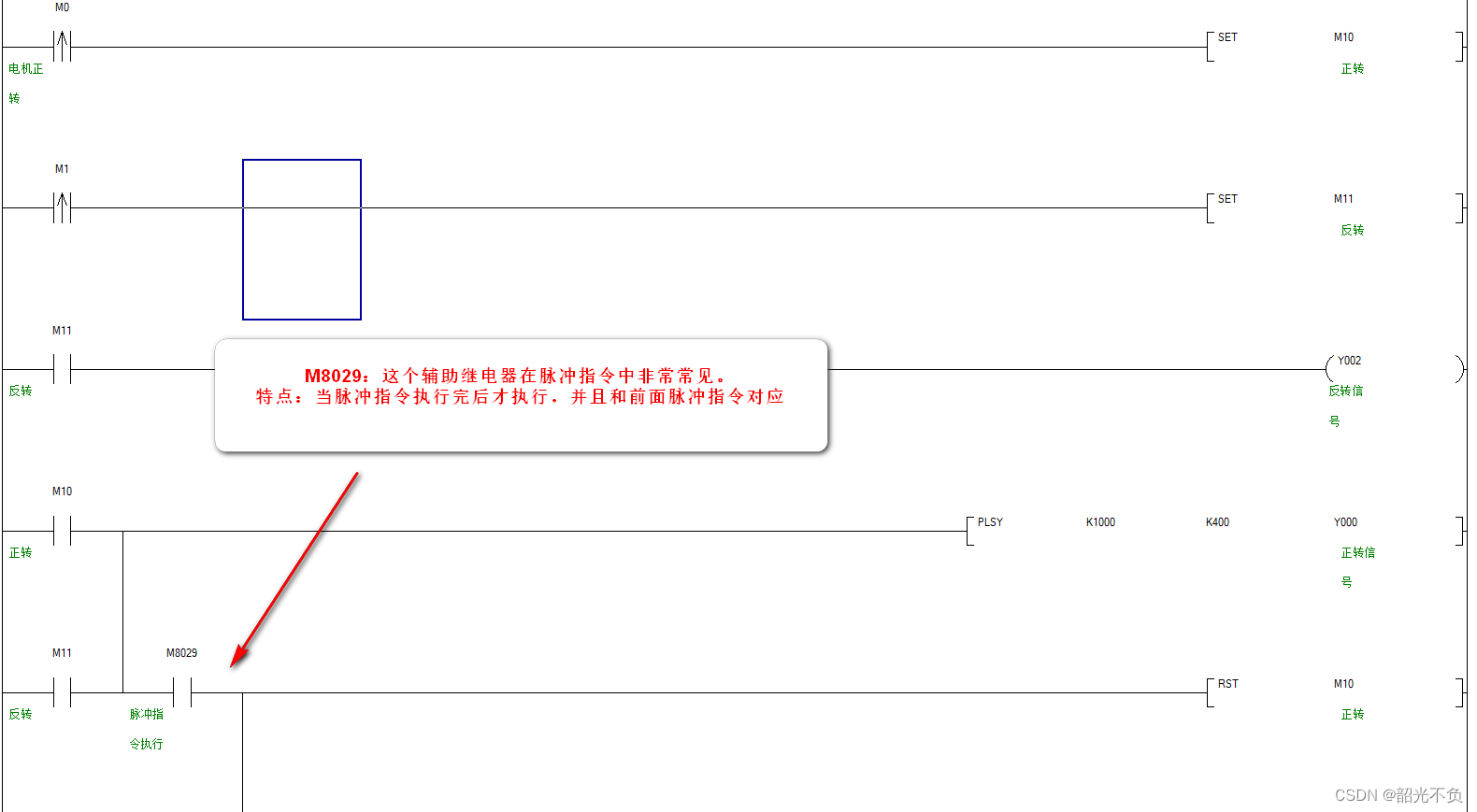
M8029特殊内部继电器
M8029:这个辅助继电器在脉冲指令中非常常见。
特点:当脉冲指令执行完后才执行,并且和前一个脉冲指令对应。
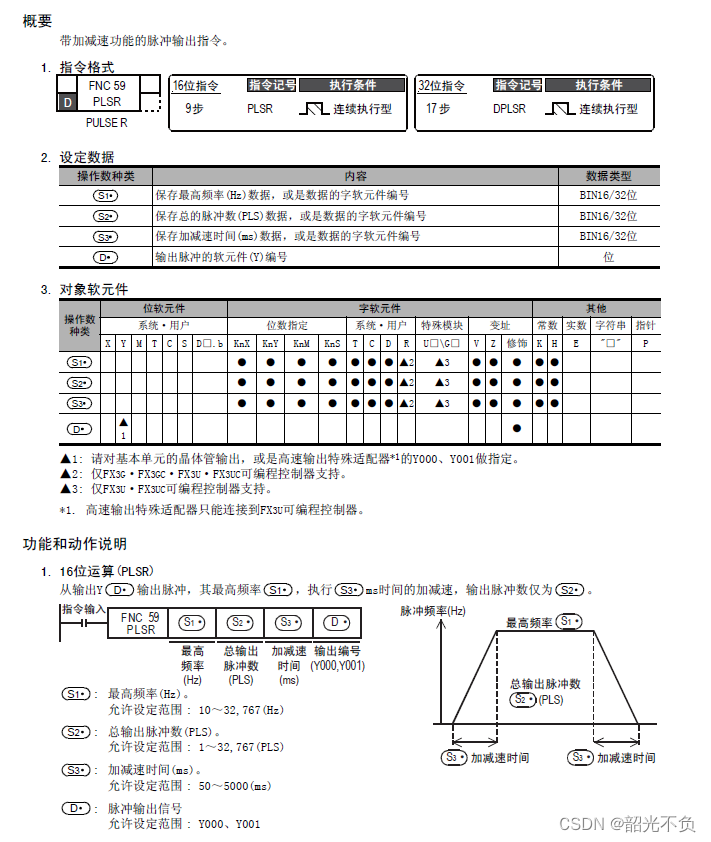
三菱PLSR(带加减速的脉冲输出指令)
执行条件---------------------------------------------------PLSR S1 S2 S3 D
S1:最高频率
S2:输出脉冲数
S3:加减速时间(50ms~5000ms)
D:脉冲输出信号Y
脉冲输出从0开始输出到最高,从最高到0.
脱机信号 (上电后电机轴是不能动的。当我们需要转动轴时就需要脱机了,大部分选择断电)
步进电机的脱机信号通常指控制步进电机的驱动器或控制器发送的一个特定信号,用于表示步进电机处于禁用状态,即停止运转的信号。
当步进电机接收到脱机信号时,驱动器会停止向电机发送脉冲信号,从而使电机停止转动。这种功能在需要临时停止步进电机运转时非常有用,例如在紧急情况下或需要手动调整位置时。脱机信号有助于确保步进电机可以在需要时快速停止并实现安全操作。
步进电机的脱机信号通常通过控制信号线或特定的控制指令来实现,具体实现方式会根据步进电机的驱动器或控制器的设计而有所不同。