前言
默认已经安装了cmake、git 、gcc 和g++
更新apt库,更新软件列表
sudo apt-get update
版本
以下库均可以通过apt-get方式安装,但是非常不建议这样做,版本不同,最后会报很多错,强烈建议源码安装!!!!!
Eigen3.3.7
Pangolin 0.6 提取码:45bo
OpenCV3.4.5 提取码:m27t
安装Pangolin
如果当前版本不是Pangolin 0.6 ,建议将之前版本删除,Pangolin文件夹即你之前安装的,具体方法如下,
cd Pangolin/build
make clean
sudo make uninstall
cd ../..
sudo rm -r Pangolin
sudo updatedb
locate pangolin
sudo rm -r /usr/local/include/pangolin
1.依赖项安装:
sudo apt-get install libgl1-mesa-dev
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
2.下载Pangolin
Pangolin 0.6 提取码:45bo,将下载后的文件夹放到指定目录,即当前安装的目录
unzip Pangolin-0.6.zip && mv Pangolin-0.6 Pangolin
3.编译和安装
cd Pangolin
mkdir build && cd build
cmake -DCPP11_NO_BOOST=1 ..
sudo make install
安装OpenCV
同样的,ORB—SLAM2对应的OpenCV的版本的是3,为了避免后续bug,建议将版本4删除,方法如下:
cd OpenCV/build
sudo make uninstall
cd ..
sudo rm -r build
sudo rm -r /usr/local/include/opencv2 /usr/local/include/opencv /usr/include/opencv /usr/include/opencv2 /usr/local/share/opencv /usr/local/share/OpenCV /usr/share/opencv /usr/share/OpenCV /usr/local/bin/opencv* /usr/local/lib/libopencv*
1.安装依赖项
sudo apt --fix-broken install
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev
sudo apt-get install libtiff5.dev libswscale-dev
sudo apt-get install software-properties-common
sudo apt-get update
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt-get update
sudo apt-get install libjasper1 libjasper-dev
2.下载
OpenCV3.4.5源码 提取码:m27t
tar -xvf opencv-3.4.5.tar.gz && mv opencv-3.4.5 opencv
3.安装
cd opencv
mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j
sudo make install
安装Eigen
1.下载
Eigen3.3.7
解压并重命名为eigen
tar -xvf eigen-3.3.7.tar.gz && mv eigen-3.3.7 eigen
2.安装
cd eigen
mkdir build && cd build
cmake ..
make
sudo make install
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
在很多程序中include时经常使用#include <Eigen/Dense>而不是使用#include <eigen3/Eigen/Dense>因此安装后需要将头文件从 /usr/local/include/eigen3/ 复制到 /usr/local/include
安装ORB-SLAM2
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh
报错解决
通过上述步骤,正常来说会出现如下两个错误
错误1:编译时出现了error: ‘usleep’ was not declared in this scope usleep(1000);
解决:在 ORB_SLAM2/include/System.h 中加上 #include <unistd.h>
错误2:Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;报错
解决:在LoopClosing.h中将 Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;改为Eigen::aligned_allocator<std::pair<KeyFrame *const, g2o::Sim3> > > KeyFrameAndPose;
至此,ORB-SLAM2应该能够编译通过!
运行ORB-SLAM2
单目模式运行
数据下载链接,下载如下数据集:

解压数据集
tar -xvf rgbd_dataset_freiburg1_desk.tgz
执行如下命令,在ORB-SLAM2的路径下,注意/home/ubuntu/rgbd_dataset_freiburg1_desk/是数据集地址,需要换成你自己的。
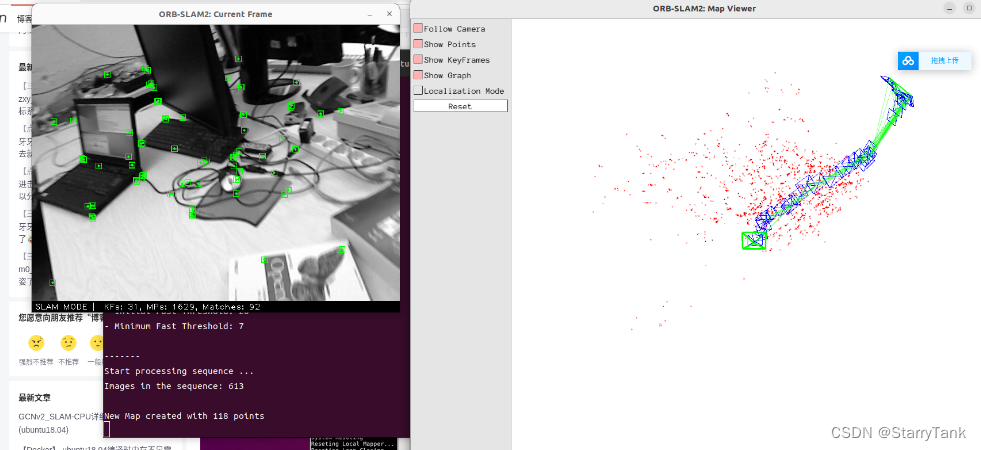
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/ubuntu/rgbd_dataset_freiburg1_desk/
不出意外又出意外了:
画面出来之后2s左右突然闪退
New Map created with 86 points
double free or corruption (out)
已放弃 (核心已转储)
删除掉ORBSLAM的cmakelists中的-march=native以及 g2o 的cmakelists中的-march=native
重新执行ORBSLAM目录下的./build.sh 后就可以正常跑了
![练习 9 Web [SUCTF 2019]CheckIn (未拿到flag)](https://img-blog.csdnimg.cn/direct/ce6fbec3c49342ce90021571deaa6860.png)