二郎最近在看定位算法,里面大家提到的比较多的就是加权最小二乘法,而也会提到闭式解,所以二郎带大家一起了解一下这些方法,希望大家都能懂得这个方法,而不是一看到就发懵。
1、闭式解=解析解
1)闭式解等价于解析解,可以把未知数提取出来(没有平方项、没有正弦余弦、没有幂项,单纯是一个变量)放到等号左边,把其他数据放在等号右边。能写成这样的形式,便可称之为闭式解。
这类方法的好处是无需估计和拟合,直接可以带入数据获得最终结果。
2、测量噪声
我们不管用什么设备对一个数据进行测量时,都会有误差。这里都会默认为我们的系统没有系统误差,只有随机误差,即误差符合高斯分布,均值为0(只有这样,我们才可以通过大量的测量,来消除误差对最终结果的影响,如果存在系统误差,它会往一个方向偏。)(什么?你不知道系统误差是啥?系统误差是一个系统的固有偏差,一般噪声是随机的,而偏差是固定的,平均值不为0)
这里我们拿TDOA算法为例子,在求解TDOA时,我们比较关注每次测量的距离差的噪声。

这里的ni1就是我们第i次测距和第1次测距之差的测量误差。
3、测量噪声的方差
方差是一种统计量,用于衡量数据集的离散程度或波动性。方差的计算通常涉及对一组数据进行统计分析,其中包括了多次测量的结果。
然而,在我们实际应用中,尤其是像加权最小二乘这样,我们很多情况下都是先写下测量误差,然后计算方差,而没有去说,多次测量,然后计算方差。
这里涉及到一个问题,方差的获取确实是需要多次测量,进而知道系统的性能。然后在使用中,尤其是在卡尔曼滤波中,这些方式都是被当作已知量,被直接应用,这里需要注意一下。
4、测量噪声的协方差矩阵
咱们先来说方差

这里的x是E(xi),即xi的期望,期望值是随机变量的加权平均值。通常情况下,我们的xi是多次测量的结果,即不存在权重,因此这里的期望是求均值。每个数与均值做差,然后求平方,这样就避免了正负号的问题,能直观地反映出每个数与均值地差距,即对同一目标进行一组测量,得到结果的离散程度。
这里我们也可以看到,方差也是求了平均,因此,很多时候这里的平均也写作E((xi-x)^2)
现在来看协方差矩阵

协方差矩阵表示不同变量之间的相关性,即一个变量和均值的差增大了,另一个变量也会随之改变。如上式也可以看出,两个只要是同时为正或者负,均值就会一直为正直。两个不同时为正或者负,那么均值就可能是0了(数学家还挺聪明的,通过这个来表示一次观测中,不同量之间的关系。我们没有必要去画那些什么相关图,因为我们只要理解了这是前人的智慧就可以了。我们也可以这么做,比如我们想知道我们同时测量两个数,他们两个是不是有关系,就可以看看他们是不是同增同减)
(生活中我们也可以用,比如我们多次测我们刷牙的时间和我们吃饭的时间,然后看是不是同增的,以此来判断关系,是不是很有趣,二郎就是这么有趣)
好了,说回来,这里提到了“矩阵”一次,一提到这个,我们就会头大
不知道是干啥的。
我们可以这么理解,协方差放到矩阵里,这里就能代表所有协方差的关系了。然后可以把这个矩阵利用在各种地方以获得自己想要的结果(我们没必要头疼一些未被应用的理论,在我们应用时再关注)。
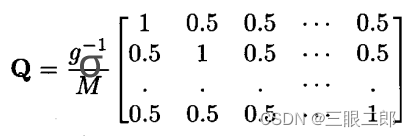
在定位的论文中,用Q代表协方差,如下式
至此,我们已经知道什么是方差和协方差了,那么我们应该怎么用呢???
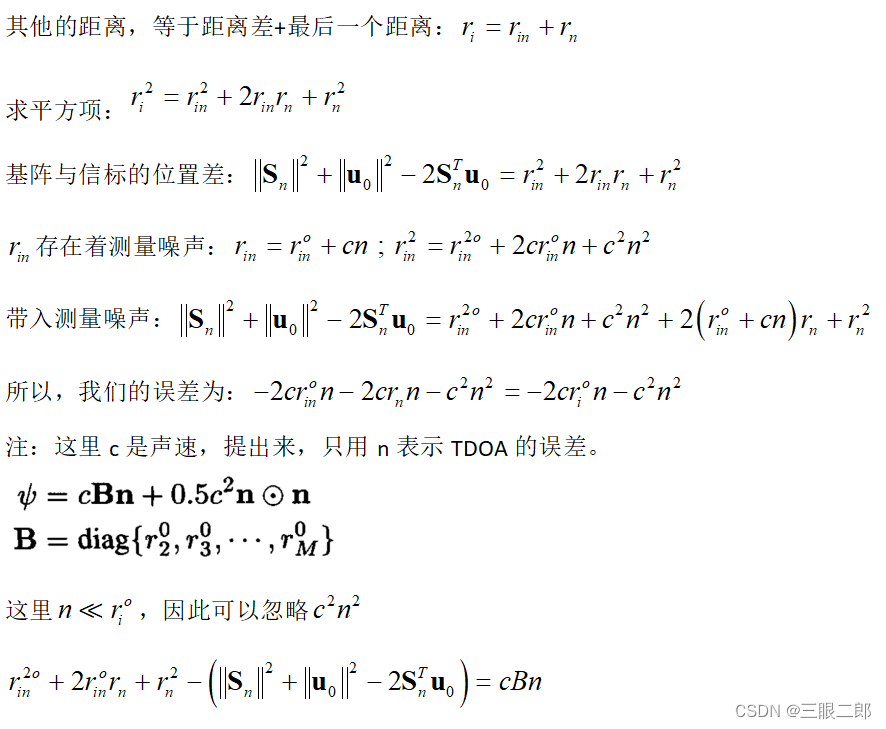
5、给出一个TDOA的例子,如何写误差
协方差矩阵如下
Q就是我们nnT
在实际使用中,我们会发现,我们可以得到测距方差(σ=10e-4),那么我们怎么获得我们的协方差?(这个是TDOA的,其他不一定适用,来自论文:A Simple and Efficient Estimator for Hyperbolic Location)
6、加权最小二乘法

最小二乘法的权重就很好写了。不过这里也需要注意一点,很多时候我们没办法直接获得方差。
所以多数情况下,我们使用的加权最小二乘法,其实是迭代加权最小二乘法(IRLS)的一种变体。