1、硬件设置
本实验通过freertos创建两个任务来分别控制LED2和LED3的亮灭,需要用到的硬件资源
- LED2和LED3指示灯
- 串口

2、STM32CubeMX设置
根据上一章的步骤创建两个任务:STM32CubeMX学习笔记22---FreeRTOS(任务创建和删除)-CSDN博客
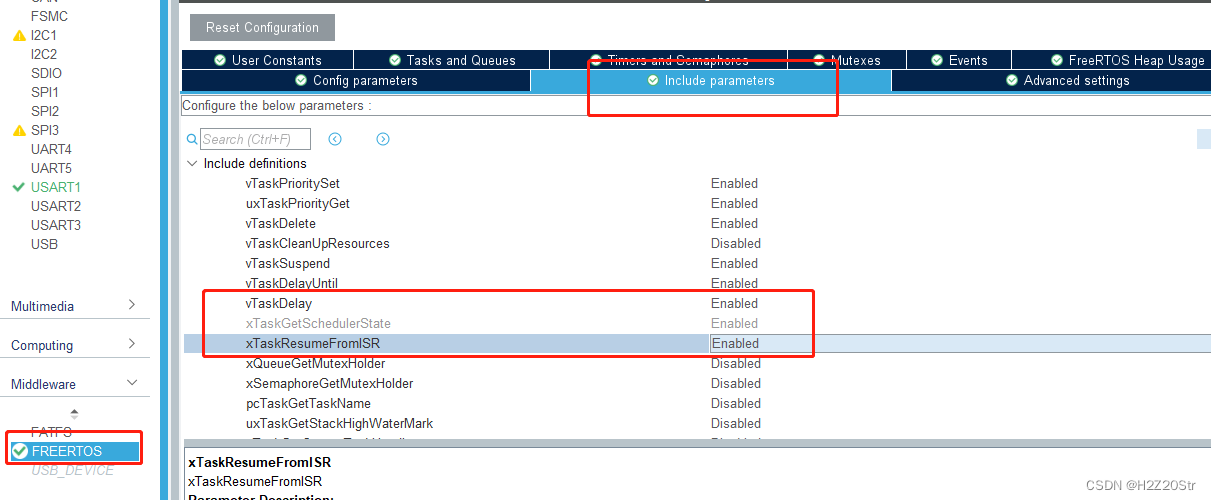
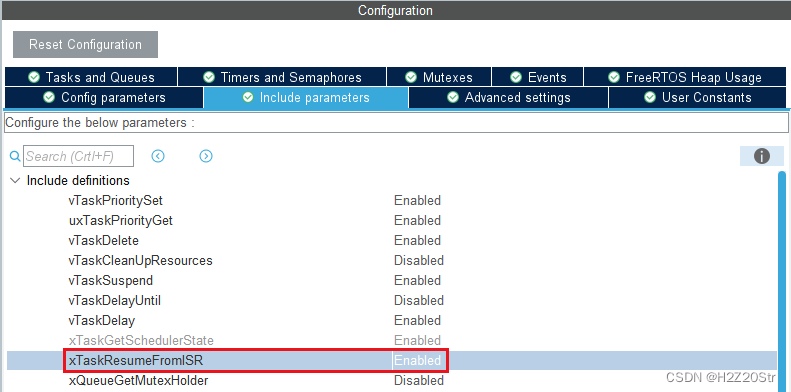
在 Include parameters 中把 vTaskSuspend 和 vTaskResumeFromISR 选择 Enabled 使能。
 生成代码。
生成代码。
3、程序编程
(1)、单个任务挂起
osThreadSuspend
挂起指定任务。被挂起的任务绝不会得到 CPU 的使用权,不管该任务具有什么优先级。
| 函数 | osThreadSuspend (osThreadId thread_id) |
|---|---|
| 参数 | thread_id: 挂起指定任务的任务ID |
| 返回值 | 错误码(osStatus ) |
要想使用该函数必须在 Include parameters 中把 vTaskSuspend 选择 Enabled 来使能。

例:
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为 NULL。
*/
osThreadSuspend (LED2Handle);//挂起LED2(2)、挂起全部任务
osThreadSuspendAll
| 函数 | osThreadSuspendAll (void) |
|---|---|
| 参数 | 无 |
| 返回值 | 错误码(osStatus ) |
(3)、单个任务恢复
osThreadResume
让挂起的任务重新进入就绪状态,恢复的任务会保留挂起前的状态信息,在恢复的时候根据挂起时的状态继续运行。如果被恢复任务在所有就绪态任务中,处于最高优先级列表的第一位,那么系统将进行任务上下文的切换。可用在中断服务程序中。
| 函数 | osThreadResume (osThreadId thread_id) |
|---|---|
| 参数 | thread_id: 挂起指定任务的任务ID |
| 返回值 | 错误码(osStatus ) |
要想在中断服务程序中使用该函数必须在 Include parameters 中把 vTaskResumeFromISR 选择 Enabled 来使能。
例:
osThreadResume (LED2Handle);//恢复LED2(4)、全部任务恢复
osThreadResumeAll,将所有的任务都恢复。
| 函数 | osStatus osThreadResumeAll (void) |
|---|---|
| 参数 | 无 |
| 返回值 | 错误码 |
osThreadResumeAll 函数的使用方法很简单,但是要注意,调用了多少次 osThreadSuspendAll() 函数就必须同样调用多少次 osThreadResumeAll() 函数。
void vDemoFunction( void )
{
osThreadSuspendAll();
/* 处理 xxx 代码 */
osThreadSuspendAll();
/* 处理 xxx 代码 */
osThreadSuspendAll();
/* 处理 xxx 代码 */
osThreadResumeAll();
osThreadResumeAll();
osThreadResumeAll();
}
(5)、中断服务中恢复
使用 xTaskResumeFromISR()的时候有几个需要注意的地方:
- 当函数的返回值为 pdTRUE 时:恢复运行的任务的优先级等于或高于正在运行的任务,表明在中断服务函数退出后必 须进行一次上下文切换 , 使用 portYIELD_FROM_ISR() 进行上下文切换。当函数的返回值为 pdFALSE 时:恢复运行的任务的优先级低于当前正在运行的任务,表明在中断服务函数退出后不需 要进行上下文切换。
- xTaskResumeFromISR() 通常被认为是一个危险的函数,因为它的调用并非是固定的,中断可能随时来来临。所以 xTaskResumeFromISR()不能用于任务和中断间的同步,如果中断恰巧在任务被挂起之前到达,这就会导致一次中断丢失(任务还没有挂起,调用 xTaskResumeFromISR()函数是没有意义的,只能等下一次中断)。这种情况下,可以使用信号量或者任务通知来同步就可以避免这种情况。
void vAnExampleISR( void )
{
BaseType_t xYieldRequired;
/* 恢复被挂起的任务 */
xYieldRequired = xTaskResumeFromISR( xHandle );
if ( xYieldRequired == pdTRUE )
{
/* 执行上下文切换, ISR 返回的时候将运行另外一个任务 */
portYIELD_FROM_ISR(xYieldRequired );
}
}
(6)、获取任务状态
osThreadGetState,获取任务当前状态。
| 函数 | osThreadGetState(osThreadId thread_id) |
|---|---|
| 参数 | thread_id: 任务ID |
| 返回值 | 以下值(osThreadState ) |
/* Thread state returned by osThreadGetState */
typedef enum {
osThreadRunning = 0x0, /*线程正在查询自身的状态,因此必须正在运行。*/
osThreadReady = 0x1 , /* 正在查询的线程位于已读或挂起的就绪列表中。 */
osThreadBlocked = 0x2, /* 正在查询的线程处于阻止状态。 */
osThreadSuspended = 0x3, /*被查询的线程处于“挂起”状态,或者处于“阻止”状态,超时时间无限长。 */
osThreadDeleted = 0x4, /* 正在查询的线程已被删除,但其TCB尚未释放。 */
osThreadError = 0x7FFFFFFF
} osThreadState;
(7)、编写程序
在任务函数中编写程序,让LED1计数到10时挂起LED2,当计数到15时恢复LED2.
void LED1_Task1(void const * argument)
{
/* USER CODE BEGIN LED1_Task1 */
/* Infinite loop */
int i=0;
for(;;)
{
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_5); //LED1状态每500s翻转一次
printf("this LED1 run %d\r\n",i);
if(i++==10)
{
osThreadSuspend (LED2Handle);//挂起LED2
printf("挂起LED2 \r\n");
}
if(i==15)
{
printf("恢复LED2 \r\n");
osThreadResume (LED2Handle);//恢复LED2
}
osDelay(1001);
}
/* USER CODE END LED1_Task1 */
}
/* USER CODE END Header_LED2_Task03 */
void LED2_Task03(void const * argument)
{
/* USER CODE BEGIN LED2_Task03 */
/* Infinite loop */
/* 用于保存上次时间。调用后系统自动更新 */
static portTickType PreviousWakeTime;
/* 设置延时时间,将时间转为节拍数 */
const portTickType TimeIncrement = pdMS_TO_TICKS(1000);
/* 获取当前系统时间 */
PreviousWakeTime = osKernelSysTick();
int i=0;
for(;;)
{
/* 调用绝对延时函数,任务时间间隔为 1000 个 tick */
osDelayUntil( &PreviousWakeTime,TimeIncrement );
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_5); //LED1状态每500s翻转一次
printf("this LED2 run %d \r\n",i++);
// osDelay(900);
}
/* USER CODE END LED2_Task03 */
}4、下载验证
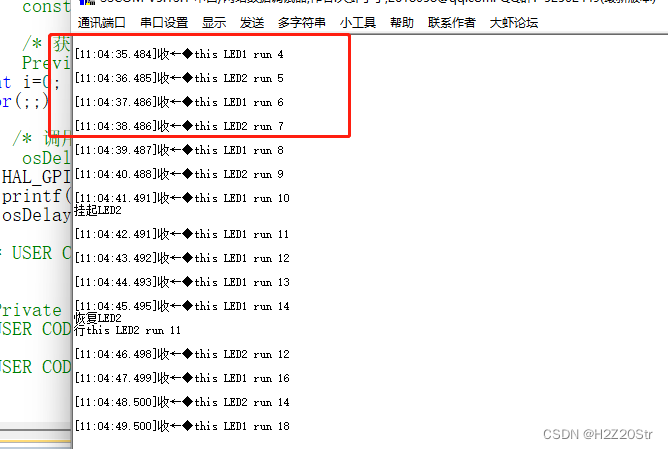
程序编译无误后下载到板子上,可以看到LED1计数到10时挂起LED2,当计数到15时恢复LED2。
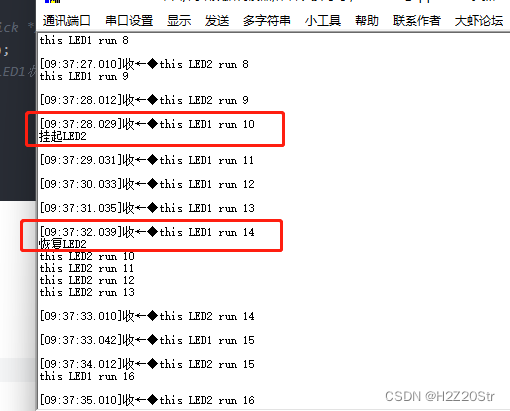
注:在不同任务(任务优先级相同)中同时使用同一个中断会导致任务轮流使用该中断,如LED1和LED2都延时1000ms后同时使用printf,则会出现以下情况,即两个任务轮流使用printf,就导致了中间的遗漏了。(优先级不同则不会出现该情况)
5、参考文献
STM32CubeMX学习笔记(28)——FreeRTOS实时操作系统使用(任务管理)_stm32 rtos 任务固定时间运行-CSDN博客