51单片机学习笔记7 串转并操作方法
- 一、串转并操作简介
- 二、74HC595介绍
- 1. **功能**:
- 2. **引脚**:
- 3. **工作原理**:
- 4. 开发板原理图
- (1)8*8 LED点阵:
- (2)74HC595 串转并:
- 三、代码示例
- 1. LED 滚动显示程序
- (1)led_matrix_utils.c
- (2)main.c
- 2. 显示一个点
- 3. 显示字符程序
- (1) led_matrix_utils.c
- (2)main.c

一、串转并操作简介
由于单片机的I/O资源有限,在进行一些外围设备通讯时,如LED点阵、数码管操作,需要大量的I/O资源,为了减少单片机的资源占用,可以使用串转并的操作,通过引入专用芯片,用较少的单片机I/O引脚,控制大量的外围I/O引脚设备。
在串转并操作中,串行数据首先经过一个串行转并行转换器,该转换器将串行数据拆分为多个并行数据。
这些并行数据同时传输到并行数据接收器,每个并行数据接收器负责接收并处理其中的一部分数据。
最后,这些处理后的并行数据再通过并行数据输出端口一起输出,形成并行数据流。
二、74HC595介绍
74HC595是一种串行输入/并行输出(SIPO)移位寄存器,常用于扩展微控制器的输出端口:
1. 功能:
- 74HC595具有8位并行输出端口,可以同时控制8个输出设备,如LED、数码管等。
- 它具有串行输入端口,可以通过串行输入将数据加载到内部寄存器中。
- 74HC595还具有控制引脚,用于控制数据的加载和输出使能。
- 74HC595的并行输出为三态输出:高电平、低电平
2. 引脚:

- DS(串行数据输入):用于接收串行输入数据。
- SH_CP(时钟输入):用于接收时钟脉冲,控制数据的移位。
- ST_CP(存储时钟输入):用于接收存储时钟脉冲,控制数据的加载到寄存器中。
- OE(输出使能):用于控制输出端口的使能状态。
- Q7’(串行输出):输出从DS端输入的数据,用于级联多个74HC595。
- Q0-Q7(并行输出):8位并行输出端口。
其中Q7’可以级联下一个74HC595,这样通过3个单片机的IO口,可以控制更多的外设IO。
3. 工作原理:
- 74HC595的工作过程分为两个阶段:移位阶段和存储阶段。
- 移位阶段:在时钟信号的作用下,串行输入的数据从DS端依次移位到寄存器中。
- 存储阶段:当存储时钟信号触发时,寄存器中的数据被加载到并行输出端口,并同时输出到外部设备。
4. 开发板原理图
(1)8*8 LED点阵:
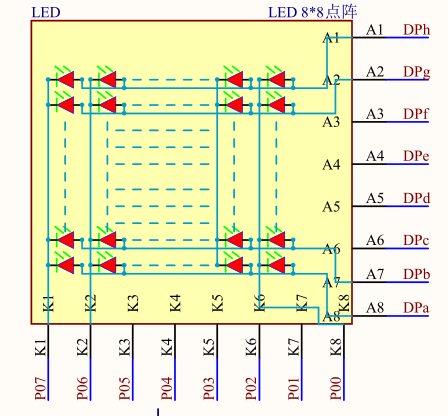
- 通过P0 端口控制列是否有效,设置P0=0,可以启用全部列。
- 通过 DPa~DPh控制每一行是否有效,行的数值通过 74HC595传过来。
(2)74HC595 串转并:
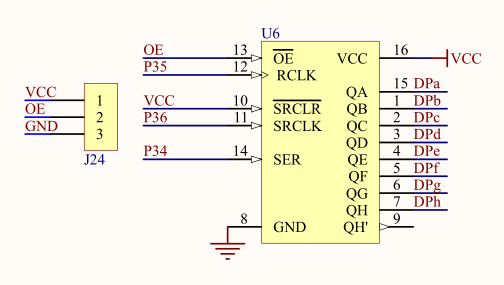
传送一个数据的过程:
- OE 置低使能芯片;
- SER传一个BIT数据;
- 给SR_CLK 一个上升沿,将SER的数据移到QA;
- 重复第2步,更多数据移入寄存器,先移入的数据放入A,其它B、C、D…依次向后移动;
- 传完8个bit数据,给 R_CLK一个上升沿,将数据推到DPn的并口输出。
三、代码示例
1. LED 滚动显示程序
本代码实验现象是: LED 点阵从最下行向上,每次滚动显示一行。
显示到第一行后,改从最右列向左,每次滚动显示一列。
(1)led_matrix_utils.c
#include "led_matrix_utils.h"
#include "common_utils.h"
// 时钟输入引脚,用于控制数据的移位操作
sbit SR_CLK = P3^6;
// 数据数据推到输出寄存器的引脚
sbit R_CLK = P3^5;
// 串行数据输入
sbit SER = P3^4;
u8 gc595_buf[8] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
// 低电平有效,开启列
#define LED_MATRIX_PORT P0
void hc595_show_data(u8 show_data)
{
u8 i = 0;
for (i = 0; i < 8; i++)
{
SER = show_data >> 7 ;
show_data <<= 1;
// 移位寄存器时钟上升沿,进行移位操作
SR_CLK = 0;
delay_10us(1);
SR_CLK = 1;
delay_10us(1);
}
// 输出寄存器时钟上升沿,将移位寄存器的数据复制到输出寄存器
R_CLK = 0;
delay_10us(1);
R_CLK = 1;
delay_10us(1);
}
void hc595_show_row(void){
u8 i=0;
LED_MATRIX_PORT = 0;
for(i=0;i<8;i++){
hc595_show_data(0x00);
hc595_show_data(gc595_buf[i]);
delay_ms(500);
}
}
void hc595_show_column(void){
u8 i=0;
hc595_show_data(0xFF);
for(i=0;i<8;i++){
LED_MATRIX_PORT = ~gc595_buf[i];
delay_ms(500);
}
}
(2)main.c
#include <reg52.h>
#include "led_utils.h"
#include "common_utils.h"
#include "led_matrix_utils.h"
/**
* @brief 主函数
*/
main()
{
// 关闭所有led
led_all_off();
while(1)
{
hc595_show_row();
hc595_show_column();
}
}
2. 显示一个点
void hc595_show_point(u8 x, u8 y){
// 把 LED_MATRIX_PORT 对应的x位置设置为0
x = 8-x;
y = 8-y;
LED_MATRIX_PORT = ~(0x01 << x);
hc595_show_data(gc595_buf[x]);
delay_ms(1000);
}
3. 显示字符程序
(1) led_matrix_utils.c
#include "led_matrix_utils.h"
#include "common_utils.h"
#include <reg52.h>
// 时钟输入引脚,用于控制数据的移位操作
sbit SR_CLK = P3^6;
// 数据数据推到输出寄存器的引脚
sbit R_CLK = P3^5;
// 串行数据输入
sbit SER = P3^4;
u8 gled_column[8] = {0x7f, 0xbf, 0xdf, 0xef, 0xf7, 0xfb, 0xfd, 0xfe};
// 低电平有效,开启列
#define LED_MATRIX_PORT P0
void led_matrix_init(void){
LED_MATRIX_PORT = 0x00;
}
void hc595_show_data(u8 show_data)
{
u8 i = 0;
for (i = 0; i < 8; i++)
{
SER = show_data >> 7 ;
show_data <<= 1;
// 移位寄存器时钟上升沿,进行移位操作
SR_CLK = 0;
delay_10us(1);
SR_CLK = 1;
}
// 输出寄存器时钟上升沿,将移位寄存器的数据复制到输出寄存器
R_CLK = 0;
delay_10us(1);
R_CLK = 1;
}
void hc595_show_char(u8* gled_row){
u8 i =0;
for(i=0;i<8;i++){
LED_MATRIX_PORT = gled_column[i];
hc595_show_data(gled_row[i]);
delay_10us(280);
hc595_show_data(0x00);
}
}
(2)main.c
#include <reg52.h>
#include "led_utils.h"
#include "common_utils.h"
#include "led_matrix_utils.h"
#include "types.h"
// 数据0
u8 gled_row[8] = {0x00, 0x7c, 0x82, 0x82, 0x82, 0x7c, 0x00, 0x00};
/**
* @brief 主函数
*/
main()
{
// 关闭所有led
led_all_off();
led_matrix_init();
while(1)
{
hc595_show_char(gled_row);
}
}
本文开源地址:https://gitee.com/xundh/learn51
![【PyTorch][chapter 22][李宏毅深度学习][ WGAN]【实战三】](https://img-blog.csdnimg.cn/direct/54522e6650df424e97d377af0e02ee69.png)


![使用ChatGPT高效完成简历制作[中篇3]-有爱AI实战教程(十)](https://img-blog.csdnimg.cn/direct/a82dd1b63b2448149423e8b2ef4c12e1.png)


![[AIGC] 在Spring Boot中指定请求体格式](https://img-blog.csdnimg.cn/direct/cd575d2000a34da69f729f18eddfa1ff.png)