目录
前言
方波控制理论
仿真
代码集成到开发板运行
总结
前言
回想以前在学校手写代码实现方波控制,花了不少时间。现在各大MCU厂家都有自己的有感或者无感方波控制的方案。这次尝试用Simulink来完成应用层算法的仿真再到代码生成开发板运行的完整流程。
方波控制理论
1.读取母线电流采样的 AD 值,计算母线电流,或者读取三相电流,计算出母线电流。
2.电流环计算应该给的 PWM 占空比,控制电流为给定电流大小
3. 读取 hall 状态,根据 Hall 状态与三相桥臂开管状态关系数组,得到相应的开管状
态,每次 hall 状态的跳变沿及为三相桥臂状态切换的时间点(也称为换相点)。
4. Hall 相邻状态间的扇区为一个电周期的六分之一,即为 60°,用定时器可记录 60°
扇区所用的时间,从而计算电流频率,从而得到电机转速。
5. 以电流环作为内环,速度环作为外环,电机进行闭环控制,如 Hall 方波控制框
图。
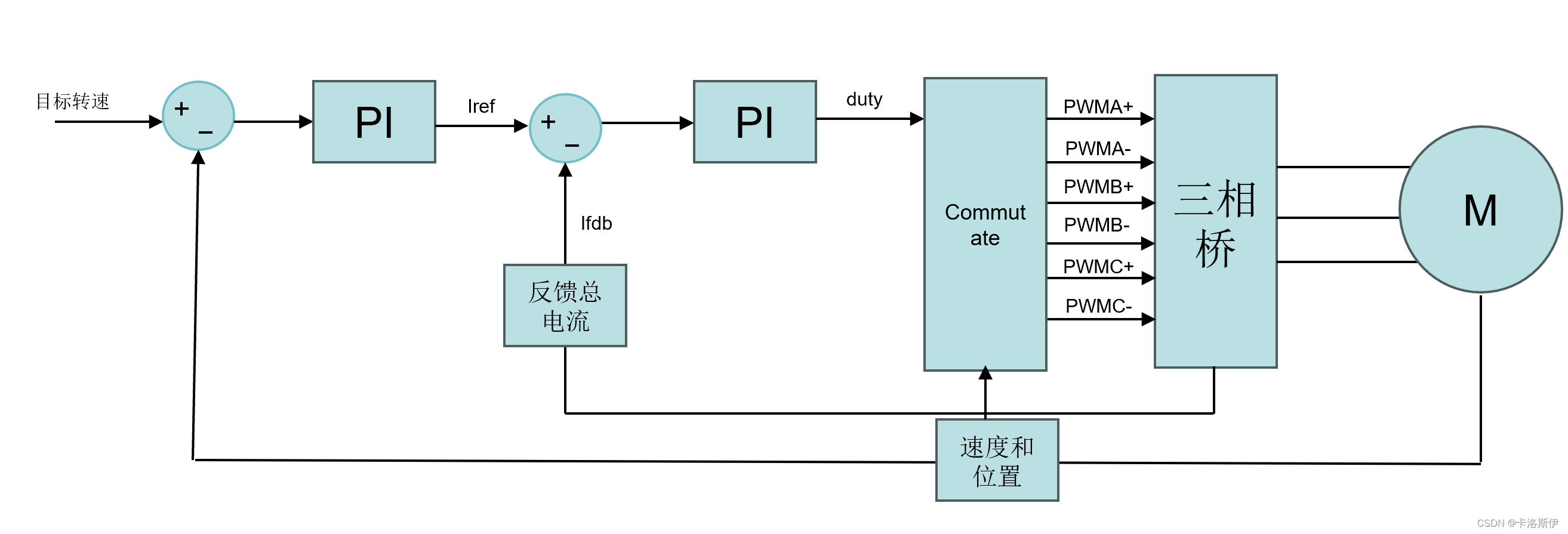
方波只需要根据霍尔信号控制对应的管子导通判断即可,这里不多赘述。这里采用双闭环PI控制电机系统。
仿真
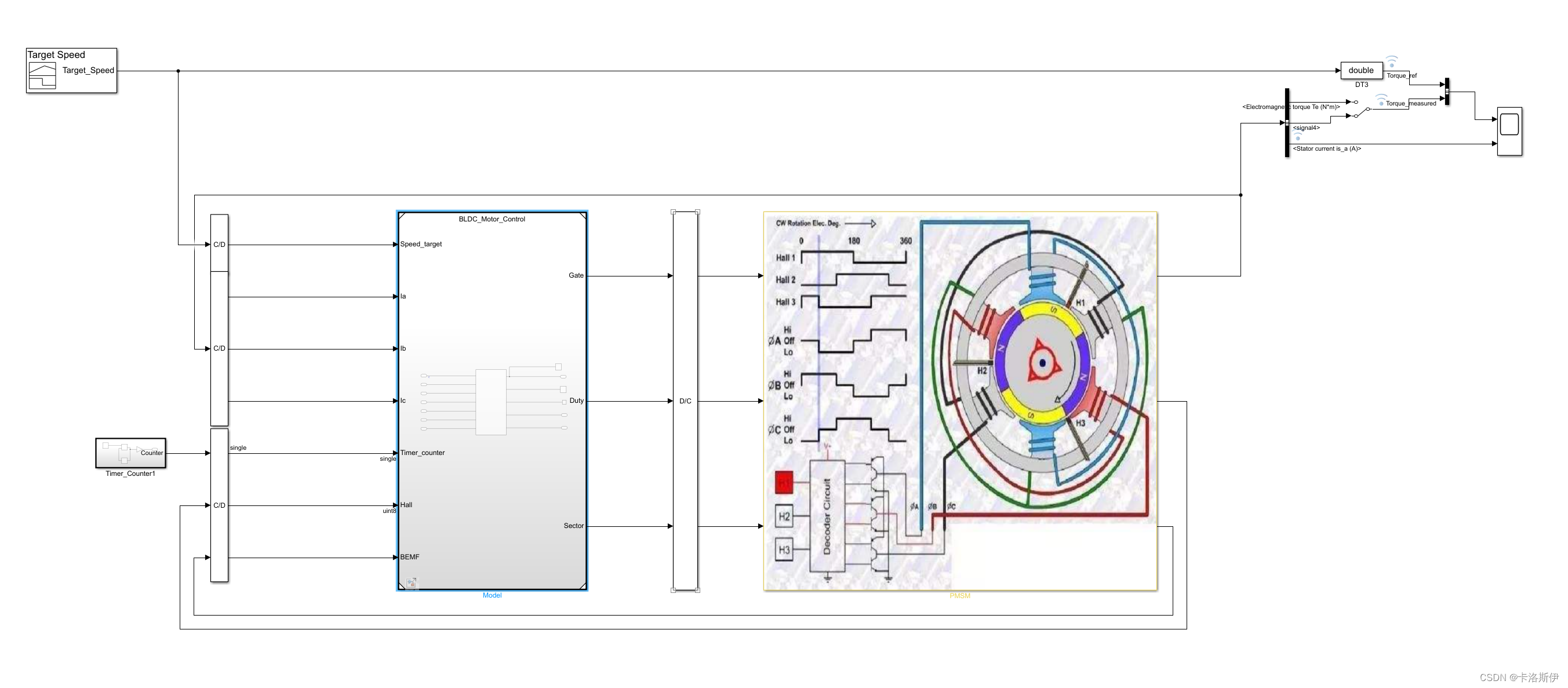
系统仿真建模如下:
左侧是输入信号,包含电机三相电流,霍尔信号,反电动势。中间为生成代码的主要模块,包含双闭环,根据霍尔计算速度,根据反电动势过零计算速度等。右侧模型是电机,包含发波和电机信号的配置输出。模型包含有无感过零检测的控制算法和霍尔方波的控制算法,BEMF这里只是模型实现,还没开始在硬件上验证,这里不做过多说明。
模型控制系统仿真建模如下,霍尔信号可以直接闭环运行,所以没有开环启动的过程。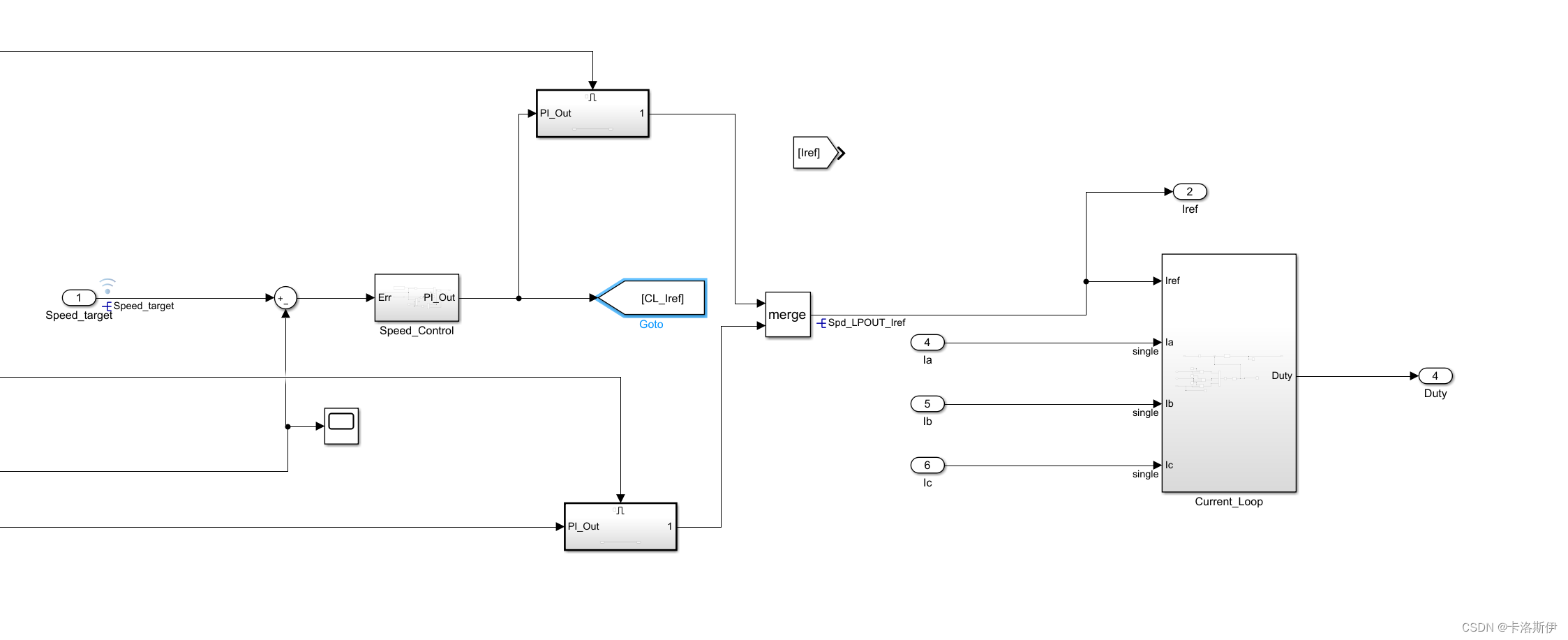
仿真的目标转速可以跟上,相电流也是标准的方波电流。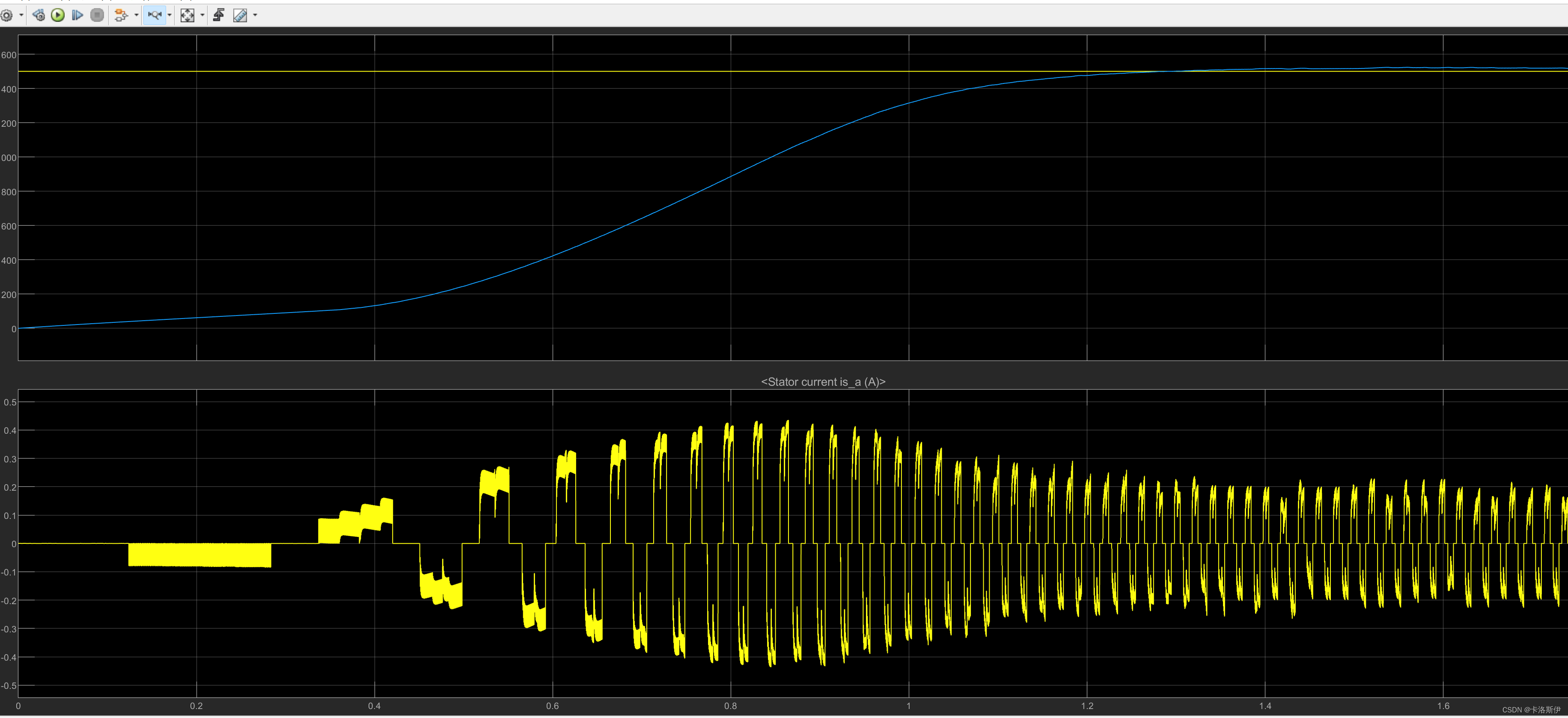
代码集成到开发板运行
用的板子还是小开发板。
开发板 STM32F...-淘宝网 (taobao.com)

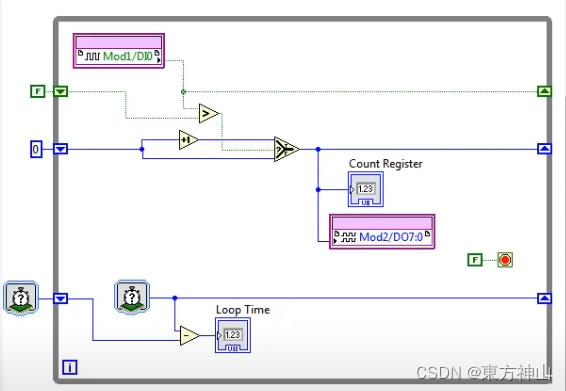
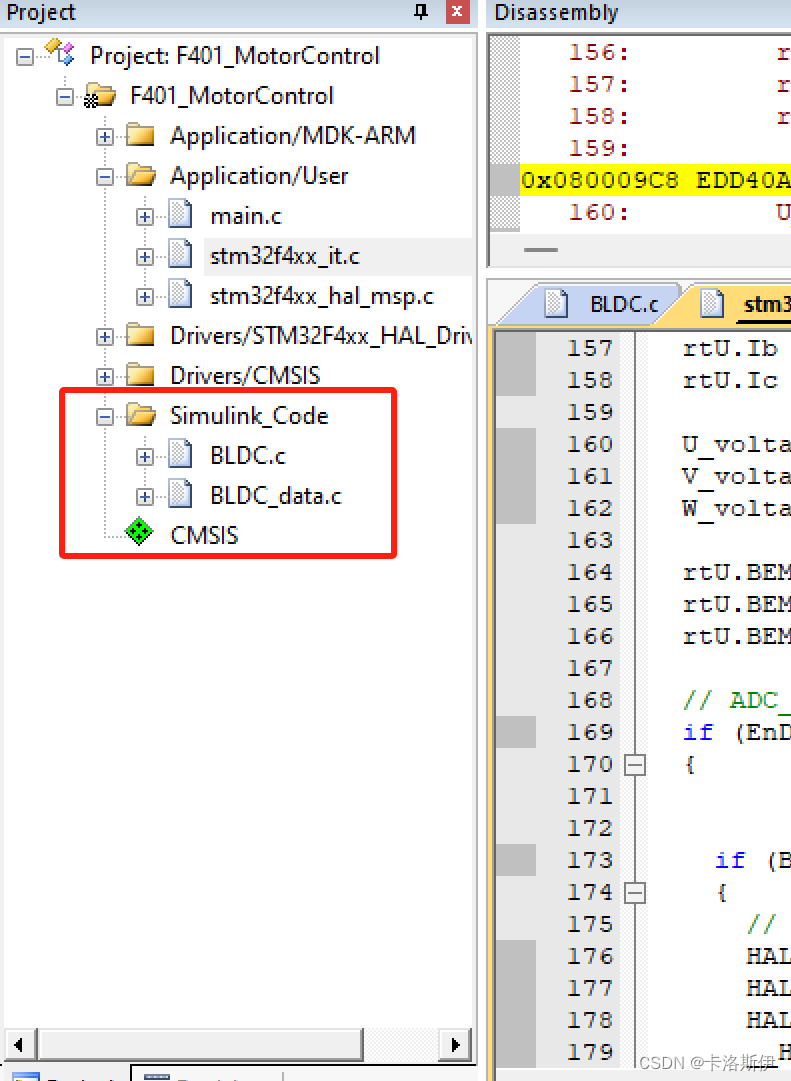
红框就是Simulink生成的代码,进行集成后得到如下的工程。
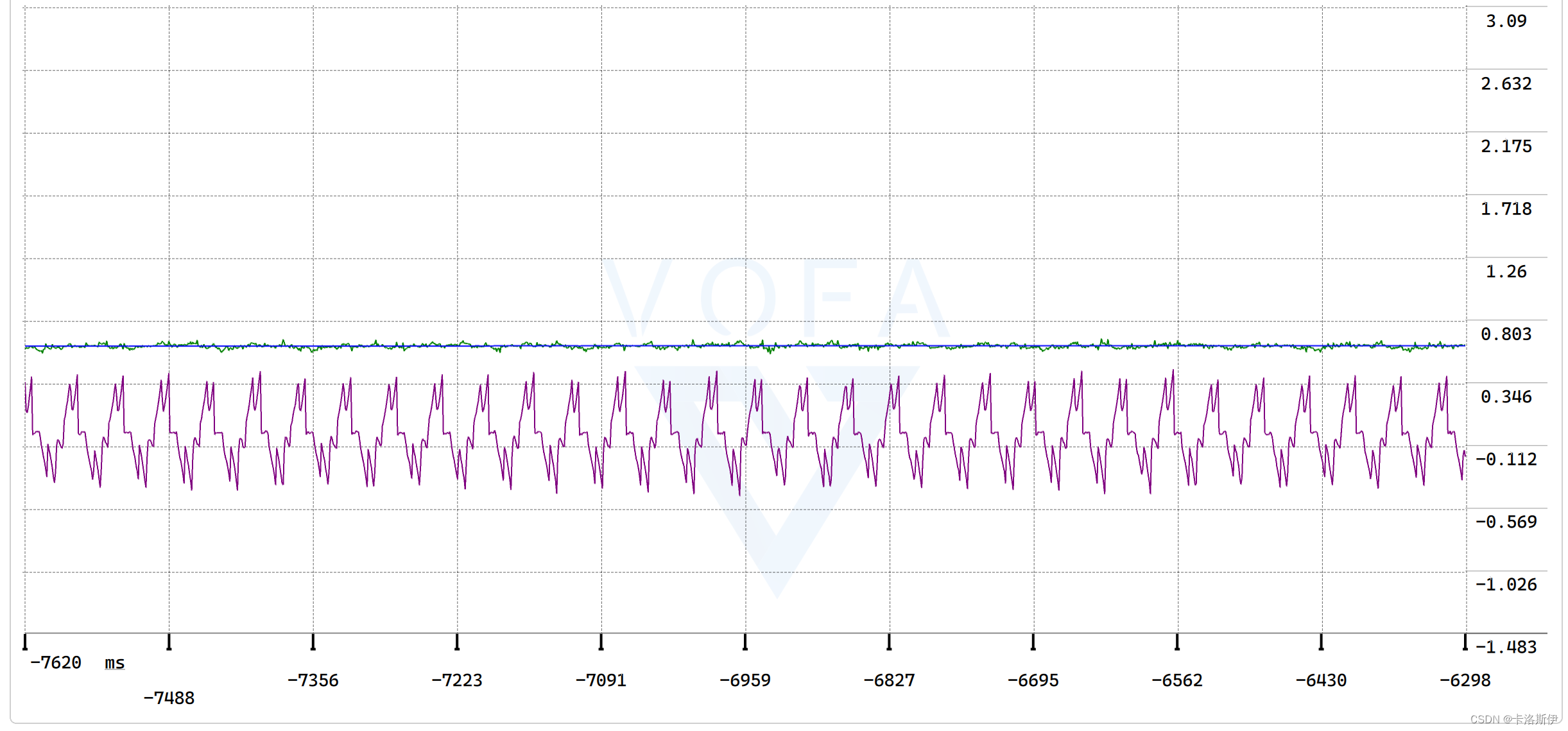
上位机通信,相电流和电流环和反馈的总电流如下。由此可见电流环也很好的控住了。
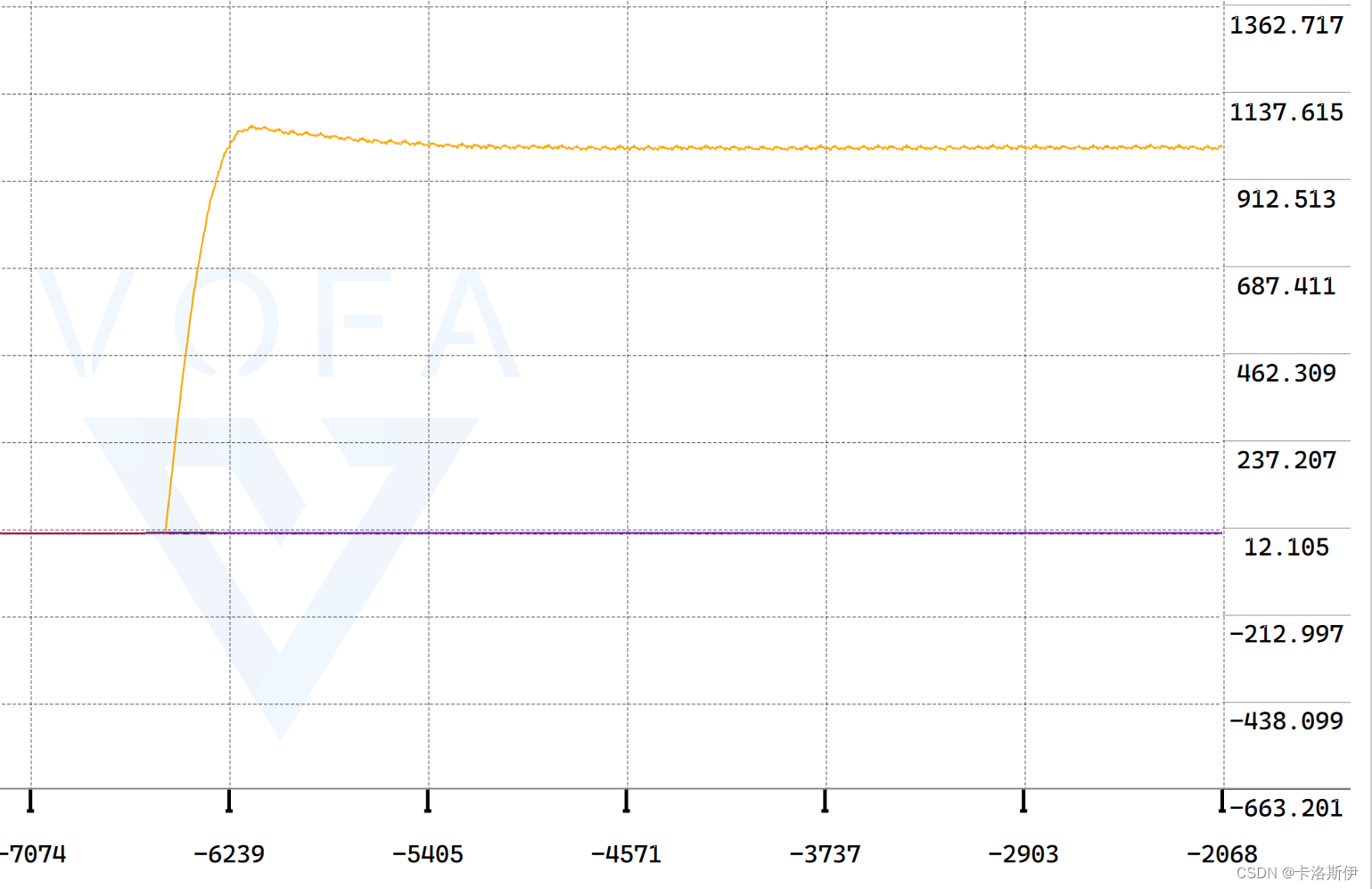
速度,给定转速1000,实际反馈速度也能够收敛。
总结
到此无刷电机霍尔方波的六步换向控制,仿真验证,再到实际硬件上运行的整个流程就完成了。