目录
- 1.背景
- 2.算法原理
- 2.1算法思想
- 2.2算法过程
- 3.代码实现
- 4.参考文献
1.背景
2019年,Heidari 等人受到哈里斯鹰捕食行为启发,提出了哈里斯鹰算法(Harris Hawk Optimization, HHO)。
2.算法原理
2.1算法思想

根据哈里斯鹰特性,HHO分为探索-过渡-开发三个阶段。
2.2算法过程
探索:
哈里斯鹰以其强大的视力追踪和检测猎物,但有时猎物不易察觉。它们会在沙漠地区等待、观察和监视,可能需要几个小时才能发现猎物。哈里斯鹰会随机停歇在某些位置,并等待检测猎物,使用两种策略:当
q
<
0.5
q<0.5
q<0.5时根据其他家庭成员和猎物的位置进行停歇;当
q
≥
0.5
q \ge 0.5
q≥0.5时停歇在随机的高树上。
X
(
t
+
1
)
=
{
X
r
a
n
d
(
t
)
−
r
1
∣
X
r
a
n
d
(
t
)
−
2
r
2
X
(
t
)
∣
q
≥
0.5
(
X
r
a
b
b
i
t
(
t
)
−
X
m
(
t
)
)
−
r
3
(
L
B
+
r
4
(
U
B
−
L
B
)
)
q
<
0.5
X(t+1)=\begin{cases}X_{rand}(t)-r_1|X_{rand}(t)-2r_2X(t)|&q\ge0.5\\(X_{rabbit}(t)-X_m(t))-r_3(LB+r_4(UB-LB))&q<0.5\end{cases}
X(t+1)={Xrand(t)−r1∣Xrand(t)−2r2X(t)∣(Xrabbit(t)−Xm(t))−r3(LB+r4(UB−LB))q≥0.5q<0.5
其中,
X
r
a
n
d
(
t
)
,
X
r
a
b
b
i
t
(
t
)
,
X
m
(
t
)
X_{rand}(t),X_{rabbit}(t),X_m(t)
Xrand(t),Xrabbit(t),Xm(t)分别为随机个体位置,猎物位置(当前适应度最优)和群体平均位置。
过渡:
过渡阶段根据猎物的逃逸能量之间切换不同的开发利用行为。在猎物逃逸行为期间,猎物的能量会大幅下降,表述为:
E
=
2
E
0
(
1
−
t
T
)
E=2E_{0}(1-\frac{t}{T})
E=2E0(1−Tt)
在迭代过程中,动态逃逸能量
E
E
E呈下降趋势。当逃逸能量
E
≥
1
E \ge 1
E≥1时,哈里斯鹰会搜索不同的区域中的猎物(全局探索);当
E
<
1
E<1
E<1时,哈里斯鹰搜索猎物周围(局部探索)。
开发:
开发阶段较为复杂,文章中提出了四种捕食策略。首先,根据猎物是否逃脱这里由参数
r
r
r判定;哈里斯鹰采取软、硬进攻方式这里根据参数
E
E
E判定。
猎物未成功逃脱,软进攻方式:
X
(
t
+
1
)
=
(
X
r
a
b
b
i
t
(
t
)
−
X
(
t
)
)
−
E
∣
J
X
r
a
b
b
i
t
(
t
)
−
X
(
t
)
∣
,
0.5
≤
∣
E
∣
<
1
,
r
≥
0.5
X(t+1)=(X_{rabbit}(t)-X(t))-E|JX_{rabbit}(t)-X(t)|,0.5\leq|E|<1,r\geq0.5
X(t+1)=(Xrabbit(t)−X(t))−E∣JXrabbit(t)−X(t)∣,0.5≤∣E∣<1,r≥0.5
猎物未成功逃脱,硬进攻方式:
X
(
t
+
1
)
=
X
r
a
b
b
i
t
(
t
)
−
E
∣
Δ
X
(
t
)
∣
,
∣
E
∣
<
0.5
,
r
≥
0.5
X(t+1)=X_{rabbit}(t)-E|\Delta X(t)|,|E|<0.5,r\geq0.5
X(t+1)=Xrabbit(t)−E∣ΔX(t)∣,∣E∣<0.5,r≥0.5
猎物成功逃脱,软进攻方式:
X
(
t
+
1
)
=
{
Y
,
f
(
Y
)
<
f
(
X
(
t
)
)
Z
,
f
(
Z
)
<
f
(
X
(
t
)
)
Y
=
X
r
a
b
b
i
t
(
t
)
−
E
∣
J
X
r
a
b
b
i
t
(
t
)
−
X
(
t
)
∣
Z
=
Y
+
S
∗
L
F
(
D
)
,
0.5
≤
∣
E
∣
<
1
,
r
>
0.5
X(t+1)=\begin{cases}Y,f(Y)<f(X(t))\\Z,f(Z)<f(X(t))\end{cases} \\ Y=X_{rabbit}\left(t\right)-E|JX_{rabbit}\left(t\right)-X(t)|\\Z=Y+S*LF(D),0.5\leq|E|<1,r>0.5
X(t+1)={Y,f(Y)<f(X(t))Z,f(Z)<f(X(t))Y=Xrabbit(t)−E∣JXrabbit(t)−X(t)∣Z=Y+S∗LF(D),0.5≤∣E∣<1,r>0.5
猎物成功逃脱,软进攻方式:
X
(
t
+
1
)
=
{
Y
,
f
(
Y
)
<
f
(
X
(
t
)
)
Z
,
f
(
Z
)
<
f
(
X
(
t
)
)
Y
=
X
r
a
b
b
i
t
(
t
)
−
E
∣
J
X
r
a
b
b
i
t
(
t
)
−
X
m
(
t
)
∣
Z
=
Y
+
S
∗
L
F
(
D
)
,
∣
E
∣
<
0.5
,
r
>
0.5
X(t+1)=\begin{cases}Y,f(Y)<f(X(t))\\Z,f(Z)<f(X(t))\end{cases} \\ Y=X_{rabbit}\left(t\right)-E|JX_{rabbit}\left(t\right)-X_m(t)|\\Z=Y+S*LF(D),|E|<0.5,r>0.5
X(t+1)={Y,f(Y)<f(X(t))Z,f(Z)<f(X(t))Y=Xrabbit(t)−E∣JXrabbit(t)−Xm(t)∣Z=Y+S∗LF(D),∣E∣<0.5,r>0.5
其中,
L
F
LF
LF表示莱维飞行。
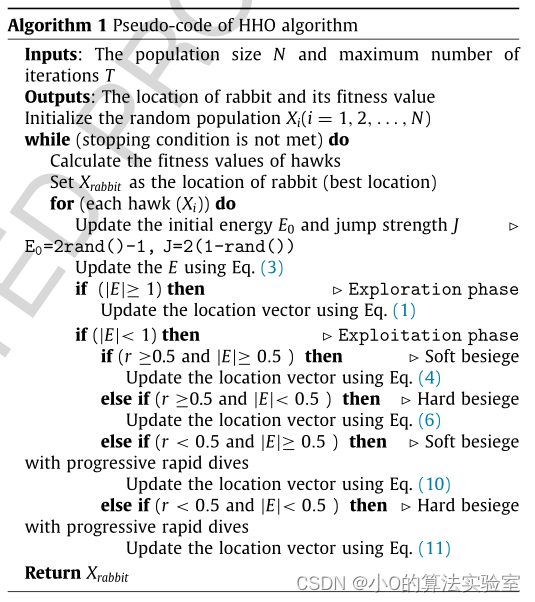
伪代码:
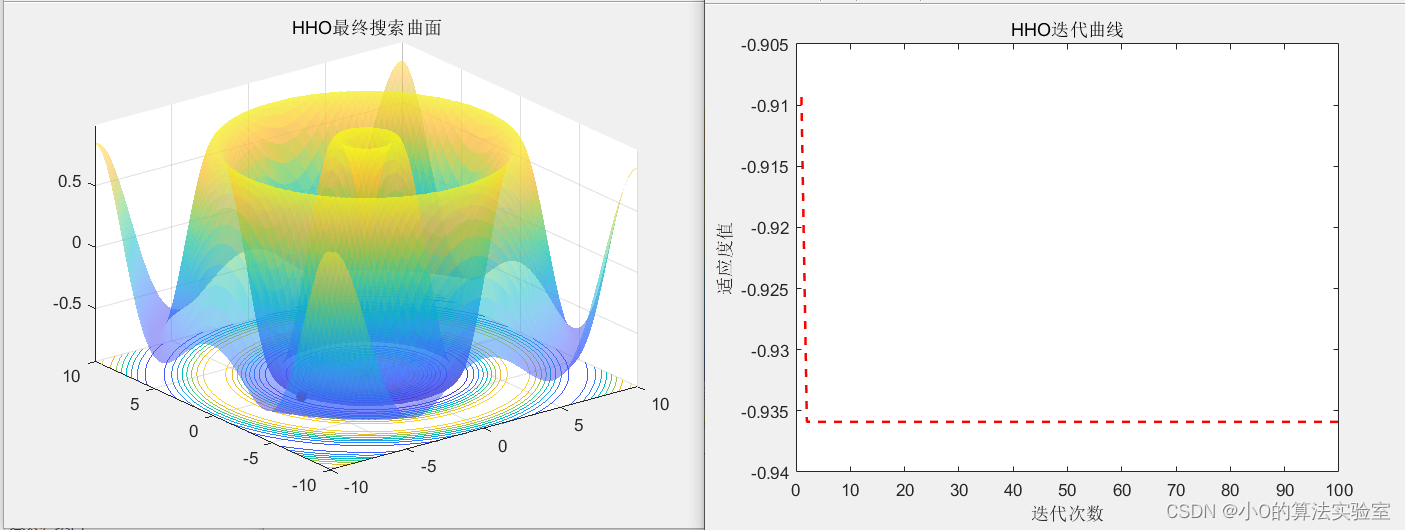
3.代码实现
% 哈里斯鹰算法
function [Best_pos, Best_fitness, Iter_curve, History_pos, History_best] = HHO(pop, maxIter,lb,ub,dim,fobj)
%input
%pop 种群数量
%dim 问题维数
%ub 变量上边界
%lb 变量下边界
%fobj 适应度函数
%maxIter 最大迭代次数
%output
%Best_pos 最优位置
%Best_fitness 最优适应度值
%Iter_curve 每代最优适应度值
%History_pos 每代种群位置
%History_best 每代最优位置
%% 初始化种群
X = zeros(pop, dim);
for i = 1:dim
X(:,i) = rand(pop,1) * (ub(i) - lb(i)) + lb(i);
end
%% 记录
Best_pos=zeros(1,dim);
Best_fitness=inf;
Iter_curve=zeros(1,maxIter);
%% 迭代
t=0;
while t<maxIter
for i=1:size(X,1)
% 边界检查
FU=X(i,:)>ub;FL=X(i,:)<lb;X(i,:)=(X(i,:).*(~(FU+FL)))+ub.*FU+lb.*FL;
fitness=fobj(X(i,:));
if fitness<Best_fitness
Best_fitness=fitness;
Best_pos=X(i,:);
end
end
E1=2*(1-(t/maxIter));
for i=1:size(X,1)
E0=2*rand()-1; %-1<E0<1
Escaping_Energy=E1*(E0);
if abs(Escaping_Energy)>=1
q=rand();
rand_Hawk_index = floor(pop*rand()+1);
X_rand = X(rand_Hawk_index, :);
if q<0.5
X(i,:)=X_rand-rand()*abs(X_rand-2*rand()*X(i,:));
elseif q>=0.5
X(i,:)=(Best_pos(1,:)-mean(X))-rand()*((ub-lb)*rand+lb);
end
elseif abs(Escaping_Energy)<1
r=rand();
if r>=0.5 && abs(Escaping_Energy)<0.5
X(i,:)=(Best_pos)-Escaping_Energy*abs(Best_pos-X(i,:));
end
if r>=0.5 && abs(Escaping_Energy)>=0.5
Jump_strength=2*(1-rand());
X(i,:)=(Best_pos-X(i,:))-Escaping_Energy*abs(Jump_strength*Best_pos-X(i,:));
end
if r<0.5 && abs(Escaping_Energy)>=0.5
Jump_strength=2*(1-rand());
X1=Best_pos-Escaping_Energy*abs(Jump_strength*Best_pos-X(i,:));
if fobj(X1)<fobj(X(i,:))
X(i,:)=X1;
else
X2=Best_pos-Escaping_Energy*abs(Jump_strength*Best_pos-X(i,:))+rand(1,dim).*Levy(dim);
if (fobj(X2)<fobj(X(i,:)))
X(i,:)=X2;
end
end
end
if r<0.5 && abs(Escaping_Energy)<0.5
Jump_strength=2*(1-rand());
X1=Best_pos-Escaping_Energy*abs(Jump_strength*Best_pos-mean(X));
if fobj(X1)<fobj(X(i,:))
X(i,:)=X1;
else
X2=Best_pos-Escaping_Energy*abs(Jump_strength*Best_pos-mean(X))+rand(1,dim).*Levy(dim);
if (fobj(X2)<fobj(X(i,:)))
X(i,:)=X2;
end
end
end
end
end
t=t+1;
Iter_curve(t)=Best_fitness;
History_best{t} = Best_pos;
History_pos{t} = X;
end
end
%% Levy飞行
function o=Levy(d)
beta=1.5;
sigma=(gamma(1+beta)*sin(pi*beta/2)/(gamma((1+beta)/2)*beta*2^((beta-1)/2)))^(1/beta);
u=randn(1,d)*sigma;v=randn(1,d);step=u./abs(v).^(1/beta);
o=step;
end
4.参考文献
[1] Heidari A A, Mirjalili S, Faris H, et al. Harris hawks optimization: Algorithm and applications[J]. Future generation computer systems, 2019, 97: 849-872.