先看看结果:
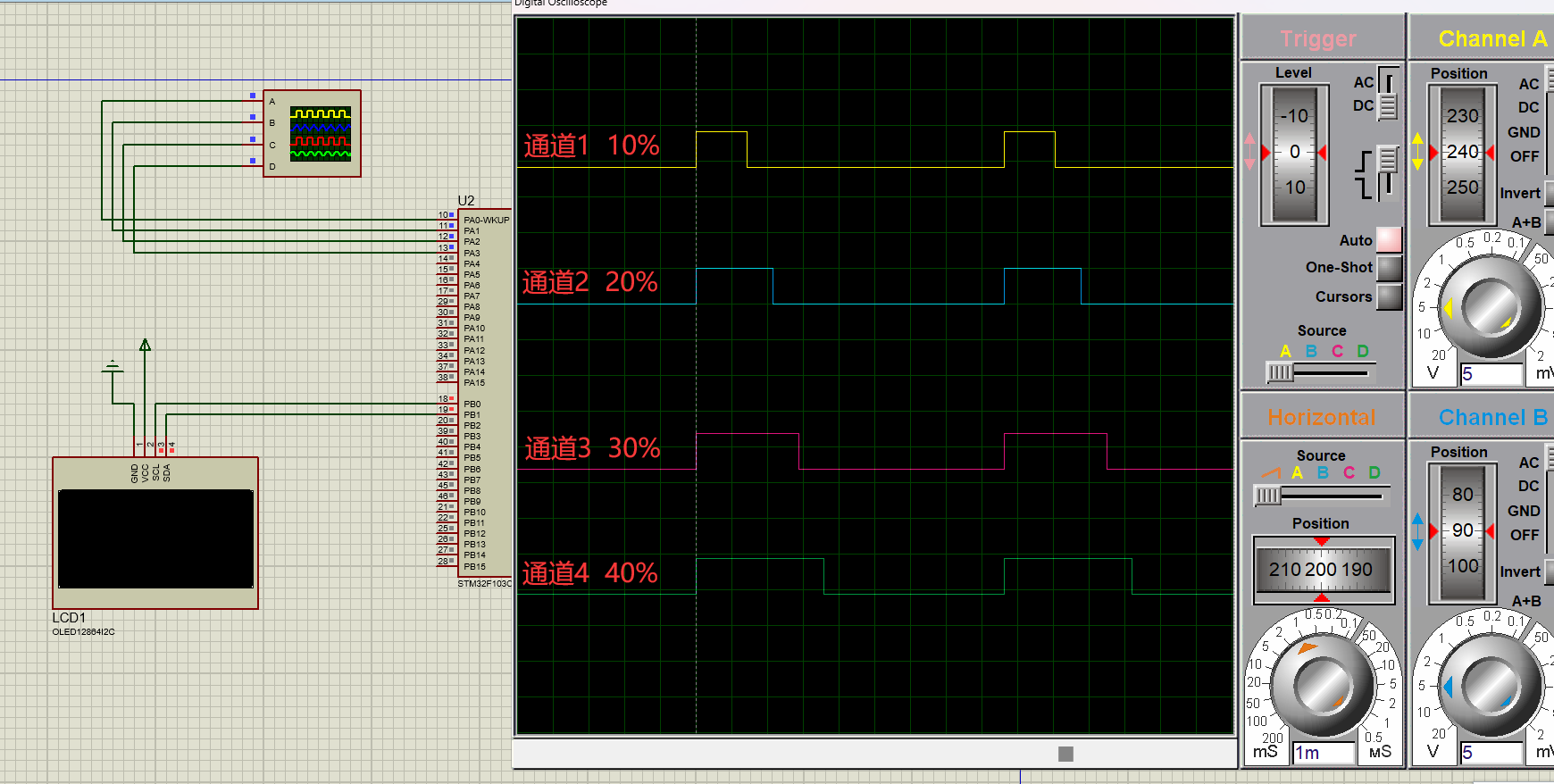
这个是根据上午发的文章的基础上更改的,很简单,只是用了一个定时器,初始化了4个比较器而已,就可以单独的控制每一路PWM的占空比了,好了,把源文件展示一下,完事去接孩子放学。
PWM.c文件:
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period = 100-1;
TIM_TimeBaseInitStruct.TIM_Prescaler = 720-1;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = 0;
TIM_OC1Init(TIM2, &TIM_OCInitStruct);
TIM_OC2Init(TIM2, &TIM_OCInitStruct);
TIM_OC3Init(TIM2, &TIM_OCInitStruct);
TIM_OC4Init(TIM2, &TIM_OCInitStruct);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 |GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
TIM_Cmd(TIM2, ENABLE);
}
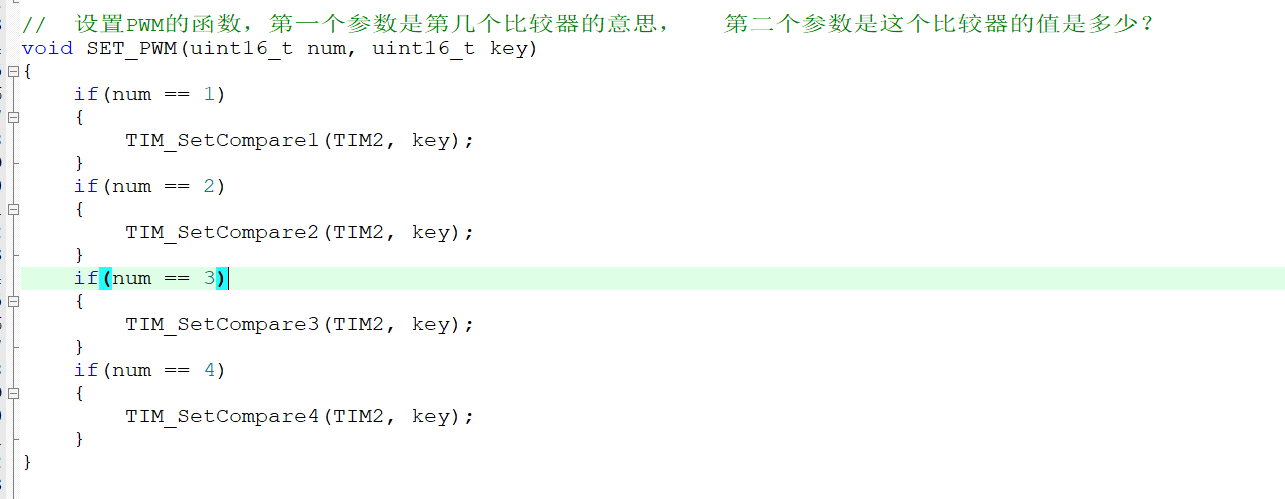
// 设置PWM的函数,第一个参数是第几个比较器的意思, 第二个参数是这个比较器的值是多少?
void SET_PWM(uint16_t num, uint16_t key)
{
if(num == 1)
{
TIM_SetCompare1(TIM2, key);
}
if(num == 2)
{
TIM_SetCompare2(TIM2, key);
}
if(num == 3)
{
TIM_SetCompare3(TIM2, key);
}
if(num == 4)
{
TIM_SetCompare4(TIM2, key);
}
}
PWM.h文件:
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void SET_PWM(uint16_t num, uint16_t key);
#endif
main.c主函数文件:
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "PWM.h"
int main(void)
{
OLED_Init(); //oled 屏幕初始化
PWM_Init();
SET_PWM(1, 10); //设置通道1的占空比为10%
SET_PWM(2, 20); //设置通道2的占空比为20%
SET_PWM(3, 30); //设置通道3的占空比为30%
SET_PWM(4, 40); //设置通道4的占空比为40%
while(1)
{
}
}
其实整个过程只是增加了一个函数而已:这个函数就是:
 好了,自己理解吧。
好了,自己理解吧。