点位偏差一直是一个很头疼的问题,但是由于摄像头和实际环境的局限性,我们不得不面对这个问题。对此,使用判别的方式进行一个仿射变换,是一种非常有效的方式,下图中图1是基准图,图2是目标图,图3是目标图仿射变换后得到的结果图。
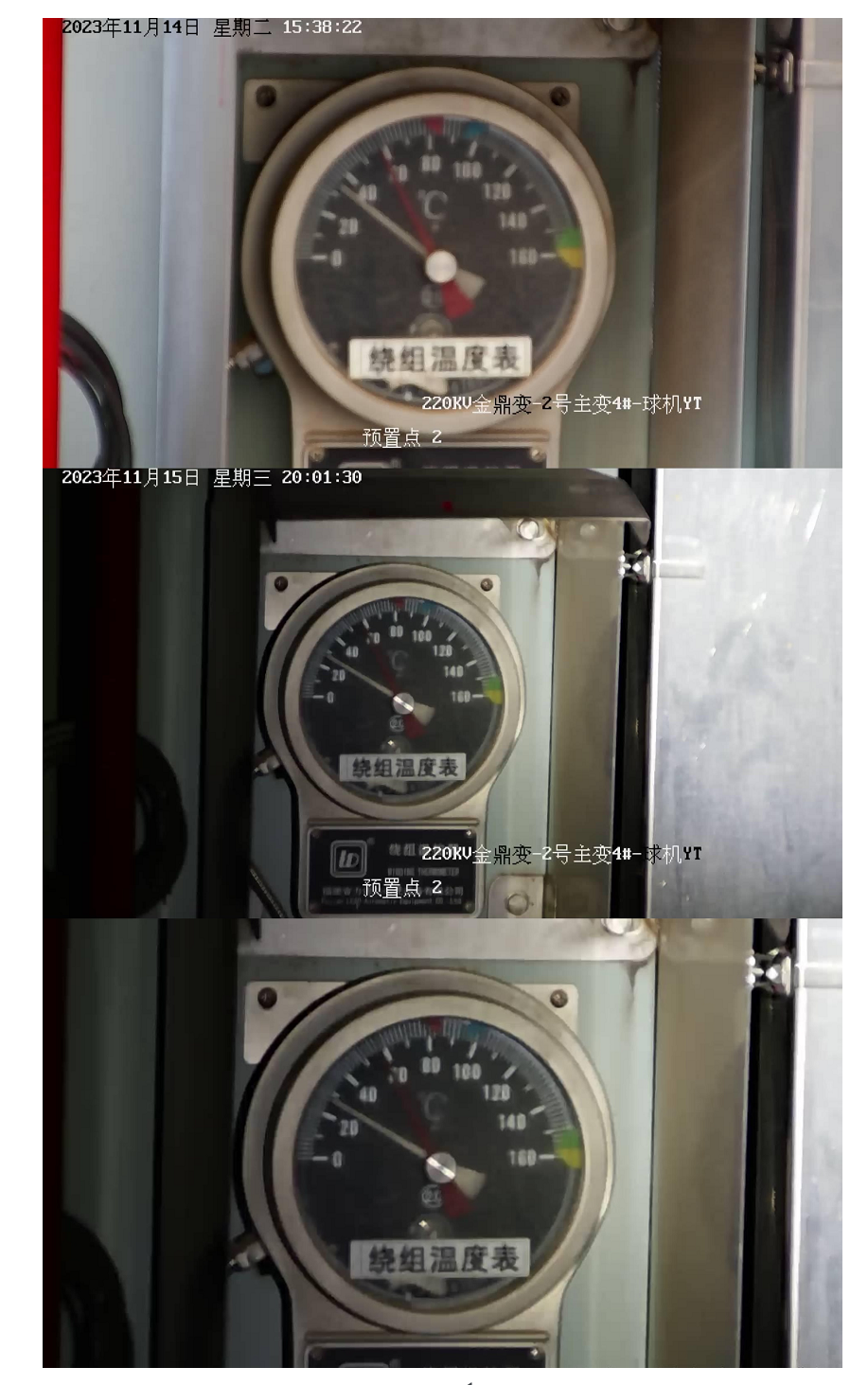
可以看出效果非常的nice。
import cv2
import numpy as np
def get_good_match(des1,des2):
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append(m)
return good
def sift_kp(image):
'''SIFT特征点检测'''
height, width = image.shape[:2]
size = (int(width * 0.2), int(height * 0.2))
shrink = cv2.resize(image, size, interpolation=cv2.INTER_AREA)
gray_image = cv2.cvtColor(shrink,cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT.create()
kp, des = sift.detectAndCompute(gray_image, None)
return kp,des
def siftImageAlignment(img1,img2):
"""
img1: cv2.imread后读取的图片数组,标准图;
img2: cv2.imread后读取的图片数组,测试图。
函数作用:把img2配准到img1上,返回变换后的img2。注意:img1和img2的size一定要相同。
"""
kp1,des1 = sift_kp(img1)
kp2,des2 = sift_kp(img2)
goodMatch = get_good_match(des1,des2)
if len(goodMatch) > 4:
ptsA= np.float32([kp1[m.queryIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ptsB = np.float32([kp2[m.trainIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ptsA = ptsA / 0.2
ptsB = ptsB / 0.2
ransacReprojThreshold = 4
H, status =cv2.findHomography(ptsA,ptsB,cv2.RANSAC,ransacReprojThreshold)
imgOut = cv2.warpPerspective(img2, H, (img1.shape[1],img1.shape[0]),flags=cv2.INTER_LINEAR + cv2.WARP_INVERSE_MAP)
return imgOut
else:
return img2
def cv_imread(file_path):
"""
能读取中文路径的cv2读图函数。
"""
cv_img = cv2.imdecode(np.fromfile(file_path,dtype=np.uint8),-1)
return cv_img
def align(t0_path, t1_path):
"""
测试函数,分别输入标准图和测试图的路径,输出变换后的图和对比图。
"""
t0 = cv_imread(t0_path)
t1 = cv_imread(t1_path)
t1_img_align, _, _, ptsA, ptsB = siftImageAlignment(t0, t1)
# # 把配准图写到本地
# t1_new_bn = 'align_' + os.path.basename(t1_path)
# cv2.imwrite('./pics/' + t1_new_bn, t1_img_align)
# new_img = np.vstack((t0, t1, t1_img_align))
# com_bn = 'compare_' + os.path.basename(t1_path)
# cv2.imwrite('./pics/' + com_bn, new_img)
return t1_img_align
if __name__ == "__main__":
t0_path = r".\_1723957234138288128.jpg"
t1_path = r".\1723957234138288128_20231115_200243.jpg"
align(t0_path, t1_path)注意着仍然会出现一些不好的状况,但相似点寻找错误或者过小的时候。


![[清爽快捷] Ubuntu上多个版本的cuda切换](https://img-blog.csdnimg.cn/img_convert/5328d0cba3853dabffef701b095076e7.png)