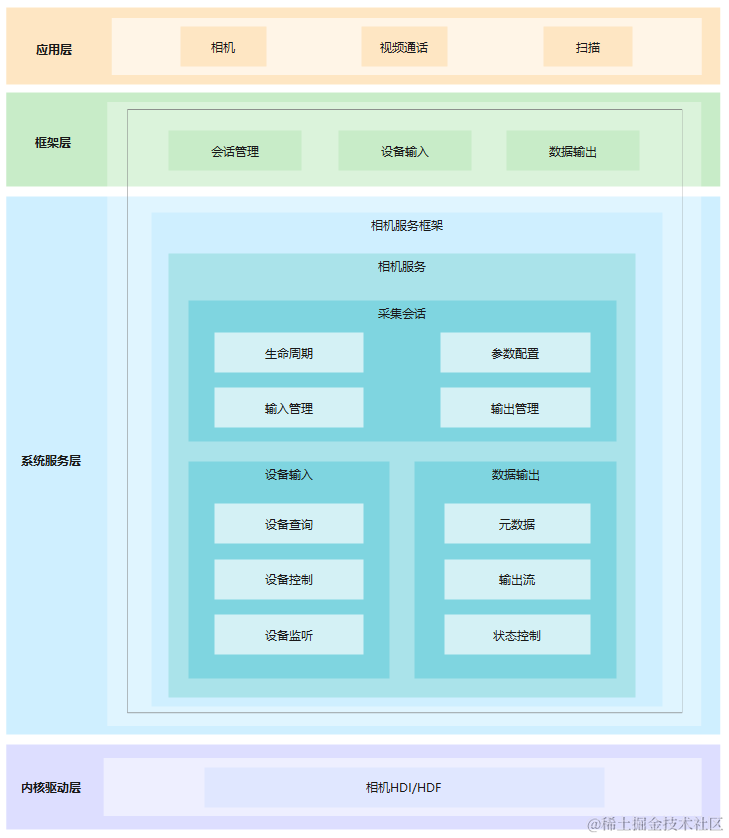
相机组件支持相机业务的开发,开发者可以通过已开放的接口实现相机硬件的访问、操作和新功能开发,最常见的操作如:预览、拍照和录像等。
基本概念
-
拍照
此功能用于拍摄采集照片。
-
预览
此功能用于在开启相机后,在缓冲区内重复采集摄像帧,支持在拍照或录像前进行摄像帧预览显示。
-
录像
此功能用于在开始录像后和结束录像前的时间段内,在缓冲区内重复采集摄像帧,支持视频录制。
图 1 相机组件架构图
目录
仓目录结构如下:
/foundation/multimedia/camera_framework # 相机组件业务代码
├── frameworks # 框架代码
│ ├── native # 内部接口实现
│ │ ├── camera # 相机框架实现
│ │ └── metadata # 元数据实现
│ └── js # 外部接口实现
│ └── camera_napi # 相机NAPI实现
├── interfaces # 接口代码
│ ├── inner_api # 内部接口
│ └── kits # 外部接口
├── LICENSE # 许可证文件
├── ohos.build # 构建文件
├── sa_profile # 服务配置文件
└── services # 服务代码
├── camera_service # 相机服务实现
└── etc # 相机服务配置
使用说明
拍照
拍照的步骤:
-
创建缓冲区消费者端监听器(CaptureSurfaceListener)以保存图像。
class CaptureSurfaceListener : public IBufferConsumerListener { public: int32_t mode_; sptr<Surface> surface_; void OnBufferAvailable() override { int32_t flushFence = 0; int64_t timestamp = 0; OHOS::Rect damage; // initialize the damage OHOS::sptr<OHOS::SurfaceBuffer> buffer = nullptr; surface_->AcquireBuffer(buffer, flushFence, timestamp, damage); if (buffer != nullptr) { void* addr = buffer->GetVirAddr(); int32_t size = buffer->GetSize(); // Save the buffer(addr) to a file. surface_->ReleaseBuffer(buffer, -1); } } }; -
获取相机管理器实例并获取相机对象列表。
sptr<CameraManager> camManagerObj = CameraManager::GetInstance(); std::vector<sptr<CameraInfo>> cameraObjList = camManagerObj->GetCameras(); -
使用相机对象创建相机输入来打开相机。
sptr<CaptureInput> cameraInput = camManagerObj->CreateCameraInput(cameraObjList[0]); -
创建采集会话。
sptr<CaptureSession> captureSession = camManagerObj->CreateCaptureSession(); -
开始配置采集会话。
int32_t result = captureSession->BeginConfig(); -
将相机输入添加到采集会话。
result = captureSession->AddInput(cameraInput); -
创建消费者 Surface 并注册监听器以监听缓冲区更新。拍照的宽和高可以配置为所支持的 1280x960 分辨率。
sptr<Surface> photoSurface = Surface::CreateSurfaceAsConsumer(); int32_t photoWidth = 1280; int32_t photoHeight = 960; photoSurface->SetDefaultWidthAndHeight(photoWidth, photoHeight); photoSurface->SetUserData(CameraManager::surfaceFormat, std::to_string(OHOS_CAMERA_FORMAT_JPEG)); sptr<CaptureSurfaceListener> capturelistener = new(std::nothrow) CaptureSurfaceListener(); capturelistener->mode_ = MODE_PHOTO; capturelistener->surface_ = photoSurface; photoSurface->RegisterConsumerListener((sptr<IBufferConsumerListener> &)capturelistener); -
使用上面创建的 Surface 创建拍照输出。
sptr<CaptureOutput> photoOutput = camManagerObj->CreatePhotoOutput(photoSurface); -
将拍照输出添加到采集会话。
result = captureSession->AddOutput(photoOutput); -
将配置提交到采集会话。
result = captureSession->CommitConfig(); -
拍摄照片。
result = ((sptr<PhotoOutput> &)photoOutput)->Capture(); -
释放采集会话资源。
captureSession->Release(); -
释放相机输入关闭相机。
cameraInput->Release();
开始和停止预览
开始和停止预览的步骤:
-
获取相机管理器实例并获取相机对象列表。
sptr<CameraManager> camManagerObj = CameraManager::GetInstance(); std::vector<sptr<CameraInfo>> cameraObjList = camManagerObj->GetCameras(); -
使用相机对象创建相机输入来打开相机。
sptr<CaptureInput> cameraInput = camManagerObj->CreateCameraInput(cameraObjList[0]); -
创建采集会话。
sptr<CaptureSession> captureSession = camManagerObj->CreateCaptureSession(); -
开始配置采集会话。
int32_t result = captureSession->BeginConfig(); -
将相机输入添加到采集会话。
result = captureSession->AddInput(cameraInput); -
使用从窗口管理器获得的 Surface 创建预览输出用以在显示上渲染。预览的宽和高可以配置为所支持的 640x480 或 832x480 分辨率,如果想保存到文件,可以按照拍照流程提到步骤,创建 Surface,注册监听器以监听缓冲区更新。
int32_t previewWidth = 640; int32_t previewHeight = 480; previewSurface->SetUserData(CameraManager::surfaceFormat, std::to_string(OHOS_CAMERA_FORMAT_YCRCB_420_SP)); sptr<CaptureOutput> previewOutput = camManagerObj->CreateCustomPreviewOutput(previewSurface, previewWidth, previewHeight); -
将预览输出添加到采集会话。
result = captureSession->AddOutput(previewOutput); -
将配置提交到采集会话。
result = captureSession->CommitConfig(); -
开始预览。
result = captureSession->Start(); -
需要时停止预览。
result = captureSession->Stop(); -
释放采集会话资源。
captureSession->Release(); -
释放相机输入关闭相机。
cameraInput->Release();
视频录像
视频录像的步骤:
-
获取相机管理器实例并获取相机对象列表。
sptr<CameraManager> camManagerObj = CameraManager::GetInstance(); std::vector<sptr<CameraInfo>> cameraObjList = camManagerObj->GetCameras(); -
使用相机对象创建相机输入来打开相机。
sptr<CaptureInput> cameraInput = camManagerObj->CreateCameraInput(cameraObjList[0]); -
创建采集会话。
sptr<CaptureSession> captureSession = camManagerObj->CreateCaptureSession(); -
开始配置采集会话。
int32_t result = captureSession->BeginConfig(); -
将相机输入添加到采集会话。
result = captureSession->AddInput(cameraInput); -
通过 Surface 创建一个视频输出,来与音频合成并保存到文件,Surface 通过 Recoder 获取。如果想仅保存视频缓冲数据到文件里,可以按照拍照流程提到步骤,创建 Surface,注册监听器以监听缓冲区更新。录像的分辨率可以在录制器内配置为所支持的 1280x720 或 640x360 分辨率。
videoSurface->SetUserData(CameraManager::surfaceFormat, std::to_string(OHOS_CAMERA_FORMAT_YCRCB_420_SP)); sptr<CaptureOutput> videoOutput = camManagerObj->CreateVideoOutput(videoSurface); -
将视频输出添加到采集会话。
result = captureSession->AddOutput(videoOutput); -
将配置提交到采集会话。
result = captureSession->CommitConfig(); -
开始视频录制。
result = ((sptr<VideoOutput> &)videoOutput)->Start(); -
需要时停止录制。
result = ((sptr<VideoOutput> &)videoOutput)->Stop(); -
释放采集会话的资源。
captureSession->Release(); -
释放相机输入关闭相机。
cameraInput->Release();
切换多个照相机设备
以下演示如何切换多个照相机设备。最初在采集会话中有一个视频输出(video output)。如果用户想要切换其他 照相机,现存的相机输入和输出需要先移除并加入新的相机输入和输出(示例中使用的是photo output)。
-
获取相机管理器实例并获取相机对象列表。
sptr<CameraManager> camManagerObj = CameraManager::GetInstance(); std::vector<sptr<CameraInfo>> cameraObjList = camManagerObj->GetCameras(); -
使用相机对象创建相机输入来打开相机。
sptr<CaptureInput> cameraInput = camManagerObj->CreateCameraInput(cameraObjList[0]); -
创建采集会话。
sptr<CaptureSession> captureSession = camManagerObj->CreateCaptureSession(); -
开始配置采集会话。
int32_t result = captureSession->BeginConfig() -
将相机输入添加到采集会话。
result = captureSession->AddInput(cameraInput); -
通过Surface创建一个视频输出。
sptr<CaptureOutput> videoOutput = camManagerObj->CreateVideoOutput(videoSurface); -
将视频输出添加到采集会话。
result = captureSession->AddOutput(videoOutput); -
将配置提交到采集会话。
result = captureSession->CommitConfig(); -
开始录制视频。
result = ((sptr<VideoOutput> &)videoOutput)->Start(); -
需要时停止录制。
result = ((sptr<VideoOutput> &)videoOutput)->Stop(); -
重新配置会话并移除相机输入和输出。
int32_t result = captureSession->BeginConfig(); -
在新的会话配置中移除相机输入。
int32_t result = captureSession->RemoveInput(cameraInput); -
同样移除相机输出。
int32_t result = captureSession->RemoveOutut(videoOutput); -
创建新的相机输入,并把它添加到采集会话。
sptr<CaptureInput> cameraInput2 = camManagerObj->CreateCameraInput(cameraObjList[1]); result = captureSession->AddInput(cameraInput2); -
创建拍照输出,成功创建后将拍照输出添加到采集会话。创建消费者 Surface 并注册监听器以监听新的拍照输出缓冲区更新。这个 Surface 用于新创建的拍照输出。
// Get the surface sptr<Surface> photoSurface = Surface::CreateSurfaceAsConsumer(); int32_t photoWidth = 1280; int32_t photoHeight = 960; photoSurface->SetDefaultWidthAndHeight(photoWidth, photoHeight); photoSurface->SetUserData(CameraManager::surfaceFormat, std::to_string(OHOS_CAMERA_FORMAT_JPEG)); sptr<CaptureSurfaceListener> capturelistener = new(std::nothrow) CaptureSurfaceListener(); capturelistener->mode_ = MODE_PHOTO; capturelistener->surface_ = photoSurface; photoSurface->RegisterConsumerListener((sptr<IBufferConsumerListener> &)capturelistener); // Create the Photo Output sptr<CaptureOutput> photoOutput = camManagerObj->CreatePhotoOutput(photoSurface); // Add the output to the capture session result = captureSession->AddOutput(photoOutput); -
将配置提交到采集会话。
result = captureSession->CommitConfig(); -
释放被移出会话的相机输入。
cameraInput->Release(); -
拍摄照片。
result = ((sptr<PhotoOutput> &)photoOutput)->Capture(); -
释放采集会话资源。
captureSession->Release(); -
释放相机输入关闭相机。
cameraInput2->Release();
设置闪光灯
拍照和录像前可以在相机输入里设置闪光灯。
-
在照相中设置闪光灯。
cameraInput->LockForControl(); cameraInput->SetFlashMode(OHOS_CAMERA_FLASH_MODE_OPEN); cameraInput->UnlockForControl(); -
在录像中设置闪光灯。
cameraInput->LockForControl(); cameraInput->SetFlashMode(OHOS_CAMERA_FLASH_MODE_ALWAYS_OPEN); cameraInput->UnlockForControl(); -
关闭闪光灯。
cameraInput->LockForControl(); cameraInput->SetFlashMode(OHOS_CAMERA_FLASH_MODE_CLOSE); cameraInput->UnlockForControl();鸿蒙OpenHarmony知识已更新←前往