原文链接:https://arxiv.org/abs/2402.05608
1. 引言
主干网络是扩散模型发展的关键方面,其中基于CNN的U-Net(下采样-跳跃连接-上采样)和基于Transformer的结构(使用自注意力替换采样块)是代表性的例子。
状态空间模型(SSM)在长序列建模方面有极大潜力。本文受Mamba启发,建立基于SSM的扩散模型,称为DiS。DiS将所有输入(时间、条件和有噪声的图像patch)视为离散token。DiS中的状态空间模型使其比CNN和Transformer有更优的放缩性,且有更低的计算开销。
2. 方法
2.1 准备知识
扩散模型:扩散模型逐步向数据加入噪声,然后将此过程反过来从噪声生成数据。噪声的加入过程称为前向过程,可表达为马尔科夫链。逆过程中,使用高斯模型近似真实逆转移,其中学习相当于对噪声的预测(即使用噪声预测网络,来最小化噪声预测目标)。
条件扩散模型会将条件(如类别、文本等,通常形式为索引或连续嵌入)引入噪声预测目标中。
具体公式见扩散模型(Diffusion Model)简介 - CSDN。
状态空间主干:状态空间模型的传统定义是将
x
(
t
)
∈
R
N
x(t)\in\mathbb R^N
x(t)∈RN通过隐状态
h
(
t
)
∈
R
N
h(t)\in\mathbb R^N
h(t)∈RN映射为
y
(
t
)
∈
R
N
y(t)\in\mathbb R^N
y(t)∈RN的线性时不变系统:
h
′
(
t
)
=
A
h
(
t
)
+
B
x
(
t
)
y
(
t
)
=
C
h
(
t
)
h'(t)=Ah(t)+Bx(t)\\y(t)=Ch(t)
h′(t)=Ah(t)+Bx(t)y(t)=Ch(t)
其中
A
∈
R
N
×
N
A\in\mathbb R^{N\times N}
A∈RN×N为状态矩阵,
B
,
C
∈
R
N
B,C\in\mathbb R^N
B,C∈RN为输入和输出矩阵。真实世界的数据通常为离散形式,可将上式离散化为
h
t
=
A
ˉ
h
t
−
1
+
B
ˉ
x
t
y
t
=
C
h
t
h_t=\bar Ah_{t-1}+\bar Bx_t\\y_t=Ch_t
ht=Aˉht−1+Bˉxtyt=Cht
其中 A ˉ = exp ( Δ ⋅ A ) , B ˉ = ( Δ ⋅ A ) − 1 ( exp ( Δ ⋅ A ) − I ) ⋅ ( Δ B ) \bar A=\exp(\Delta\cdot A),\bar B=(\Delta\cdot A)^{-1}(\exp(\Delta\cdot A)-I)\cdot(\Delta B) Aˉ=exp(Δ⋅A),Bˉ=(Δ⋅A)−1(exp(Δ⋅A)−I)⋅(ΔB)为离散状态参数, Δ \Delta Δ为离散步长。
虽然SSM理论上性质优良,但通常有高计算量和数值不稳定性。结构状态空间模型(S4)通过强制 A A A的形式来减轻这一问题,能达到比Transformer更高的性能;Mamba则进一步通过输入依赖的选择机制和更快的硬件感知算法改进之。
2.2 模型结构设计
DiS参数化噪声预测网络
ϵ
θ
(
x
t
,
t
,
c
)
\epsilon_\theta(x_t,t,c)
ϵθ(xt,t,c),以时间
t
t
t、条件
c
c
c和噪声图像
x
t
x_t
xt,预测向
x
t
x_t
xt加入的噪声。DiS基于双向Mamba结构,如下图所示。
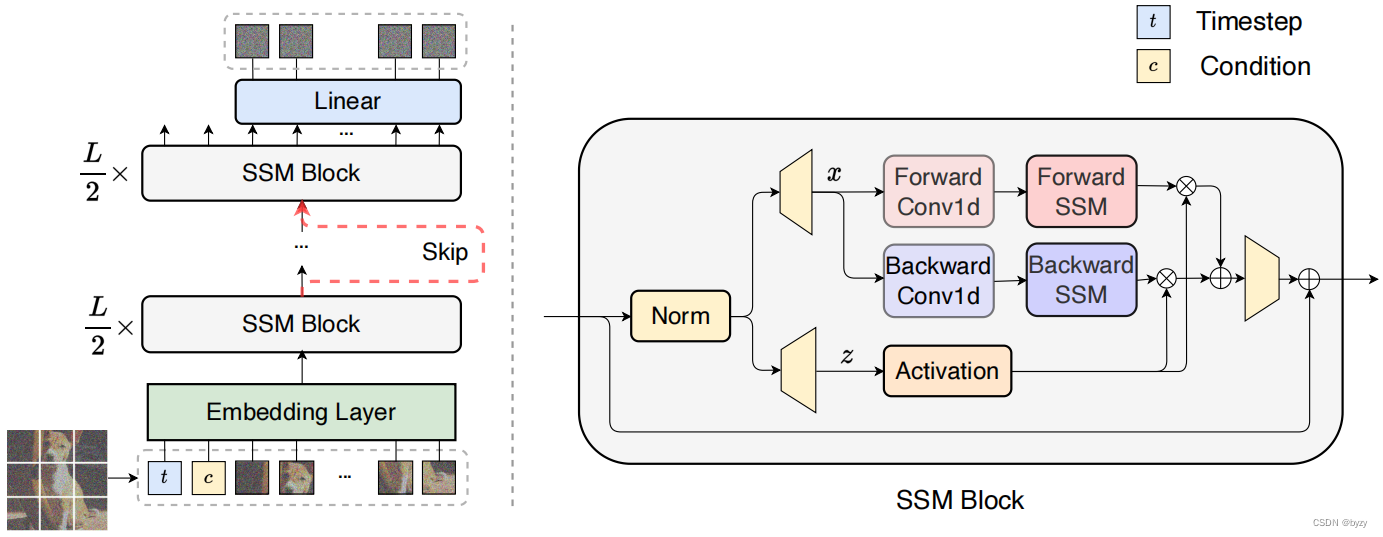
图像patch化:DiS的第一层将输入图像
I
∈
R
H
×
W
×
C
I\in\mathbb R^{H\times W\times C}
I∈RH×W×C转化为拉直的2D patch
X
∈
R
J
×
(
p
2
⋅
C
)
X\in\mathbb R^{J\times (p^2\cdot C)}
X∈RJ×(p2⋅C)。然后,通过对每个patch进行线性嵌入,转化为含
J
J
J个token的、维度为
D
D
D的序列。为每个输入token使用可学习位置编码。
J
=
H
×
W
p
2
J=\frac{H\times W}{p^2}
J=p2H×W由patch大小
p
p
p决定。
SSM块:输入token会被一组SSM块处理。SSM块的输入还包括时间 t t t与条件 c c c。本文使用双向序列建模,即SSM块的前向过程包含了前向和反向两个方向的处理。
跳跃连接:本文将 L L L个SSM块分为前半和后半两部分,每部分 ⌊ L 2 ⌋ \lfloor\frac L2\rfloor ⌊2L⌋个。设 h s h a l l o w , h d e e p ∈ R J × D h_{shallow},h_{deep}\in\mathbb{R}^{J\times D} hshallow,hdeep∈RJ×D分别为跳跃连接分支和主分支的隐状态,则通过拼接和线性投影后再送入下一个SSM块,即 L i n e a r ( C o n c a t ( h s h a l l o w , h d e e p ) ) \mathtt{Linear}(\mathtt{Concat}(h_{shallow},h_{deep})) Linear(Concat(hshallow,hdeep))。
线性解码器:需要将最后一个SSM块的隐状态解码为噪声预测和对角化协方差矩阵(与原始输入尺寸相同)。本文使用线性解码器,即LayerNorm+线性层,将每个token转化为 p 2 ⋅ C p^2\cdot C p2⋅C的张量。最后,将解码的token重排为原始大小,得到预测噪声与协方差。
条件引入:本文在输入token的序列上增加时间 t t t与条件 c c c的向量嵌入作为额外token(类似ViT中的类别token),从而无需修改SSM块。在最后一个SSM块后,从序列移除条件token。此外,还用自适应归一化层替换标准归一化层,使模型从 c c c与 t t t嵌入向量的和中回归缩放和偏移参数。
2.3 计算分析
对序列 X ∈ R 1 × J × D X\in\mathbb R^{1\times J\times D} X∈R1×J×D和状态扩维默认设置 E = 2 E=2 E=2,自注意力与SSM的计算复杂度分别为 O ( S A ) = 4 J D 2 + 2 J 2 D O(SA)=4JD^2+2J^2D O(SA)=4JD2+2J2D和 O ( S S M ) = 3 J ( 2 D ) N + J ( 2 D ) N 2 O(SSM)=3J(2D)N+J(2D)N^2 O(SSM)=3J(2D)N+J(2D)N2。
其中自注意力的计算是序列长度 J J J的二次方,而SSM则是线性关系。注意 N N N为固定参数。这说明DiS有较强的可放缩性。
3. 实验
3.1 实验设置
数据集:仅使用水平翻转数据增广。
实施细节:本文对DiS的权重使用指数移动平均方法。
3.2 模型分析
patch大小的影响:当模型大小一致时,减小patch大小(增加token数),性能会提高。这可能是扩散模型噪声预测任务的低级特性,导致需要小型patch,而不像更高级的分类任务。对高分辨率图像,使用小尺寸patch可能会引入高计算成本,可将图像转换为低维隐式表达,然后再使用DiS处理。
长跳跃的影响:比较拼接(
L
i
n
e
a
r
(
C
o
n
c
a
t
(
h
s
h
a
l
l
o
w
,
h
d
e
e
p
)
)
\mathtt{Linear}(\mathtt{Concat}(h_{shallow},h_{deep}))
Linear(Concat(hshallow,hdeep)))
、求和(
h
s
h
a
l
l
o
w
+
h
d
e
e
p
h_{shallow}+h_{deep}
hshallow+hdeep)和无跳跃连接三种方式。实验表明,求和不会带来明显的性能提升,因为SSM自身可以通过线性方式保留一些浅层信息。而使用拼接和可学习的线性投影可以大幅增加性能。
条件组合:比较两种引入时间 t t t的方案:(1)将 t t t视为token,与图像patch一同处理;(2)将 t t t的嵌入整合到SSM块的层归一化中,类似U-Net中的自适应分组归一化,得到自适应层归一化: A d a L N ( h , s ) = y s L a y e r N o r m ( h ) + y b AdaLN(h,s)=y_s\mathtt{LayerNorm}(h)+y_b AdaLN(h,s)=ysLayerNorm(h)+yb,其中 h h h为SSM的隐状态, y s , y b y_s,y_b ys,yb为时间嵌入的线性投影。实验表明前者的性能优于后者。
缩放模型大小:增大模型深度(SSM块层数)和宽度(隐状态维度)均能提高性能。
3.3 主要结果
无条件图像生成:DiS与基于U-Net或Transformer的扩散模型有相当的性能,但参数量更少。
以类别为条件的图像生成:本文的方法可以超过其余方法的性能。