STM32 学习10 PWM输出
- 一、PWM简介
- 1. PWM的概念
- 2. PWM的工作原理
- 3. PWM 常用的应用场景
- 二、一些概念
- 1. 频率
- 2. 占空比
- 三、STM32F1 PWM介绍
- 1. 定时器与寄存器
- (1)**自动重装载寄存器(ARR)**:
- (2)**比较寄存器(CCR)**:
- 2. PWM的输出模式
- (1)PWM模式1
- (2)PWM模式2
- 3. 边沿对齐与中心对齐
- (1)边沿对齐模式
- (2)中心对齐模式
- 四、PWM输出配置步骤
- 1. 使能定时器及端口时钟
- 2. 定时器的重映像
- (1)定时器4复用功能重映像
- (2)定时器3复用功能重映像
- (3) 定时器2复用功能重映像
- 3. 输出端口复用
- 4. 初始化定时器参数
- 5. 初始化PWM输出参数
- 6. 开启定时器
- 7. 修改TIMx_CCRx的值控制占空比
- 8. 使能 TIMx 在 CCRx 上的预装载寄存器
- 9. 使能 TIMx 在 ARR上的预装载寄存器允许位
- 10. 设置 MOE位
- 五、代码示例
- 1. pwm_utils.h
- 2. pwm_utils.c
- 3. main函数实现
一、PWM简介
1. PWM的概念
PWM的全称是脉冲宽度调制(Pulse Width Modulation),是一种控制模拟信号的方法。它通过改变脉冲的宽度来控制模拟信号的平均值。
2. PWM的工作原理
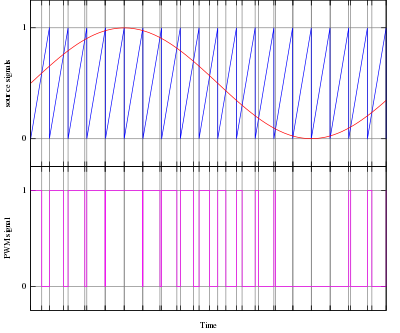
PWM的工作原理是将一个周期性的脉冲信号与一个控制信号进行比较。当控制信号大于脉冲信号时,输出高电平;当控制信号小于脉冲信号时,输出低电平。通过改变脉冲信号的宽度,可以控制输出信号的平均值。
输出信号的平均值连在一起,可以达到模拟信号的效果,如下图所示:
3. PWM 常用的应用场景
- 电机控制:用于控制电机的速度和方向;
- 照明控制:用于控制灯光的亮度;
- 电源管理:用于控制电源的输出电压;
- 音频控制:用于控制声音的大小。
二、一些概念
1. 频率
PWM波形在单位时间内重复出现的次数。
2. 占空比
PWM波形中高电平信号所占的比例。
三、STM32F1 PWM介绍
1. 定时器与寄存器
STM32F1除了基本定时器TIM6和TIM7,其它定时器都可以产生PWM输出。其中:
- TIM1和TIM8:均可同时产生7路PWM输出;
- 其它通用定时器:均可同时产生4路PWM输出。
在STM32微控制器中,生成PWM信号通常涉及到自动重装载寄存器(ARR)和比较寄存器(CCR)两个重要的寄存器。
(1)自动重装载寄存器(ARR):
- 通过修改ARR的值,可以调节PWM信号的周期,从而改变PWM信号的频率。
- 当ARR增加时,整个PWM信号的周期增加,导致PWM信号的频率降低。
(2)比较寄存器(CCR):
- 通过修改CCR的值,可以调节PWM信号的占空比,从而改变PWM信号的高电平持续时间。
- CCR的值通常应该小于ARR的值,以确保PWM信号的占空比在0到100%之间。
- 当CCR增加时,高电平部分的持续时间增加,导致PWM信号的占空比增加。
2. PWM的输出模式
PWM输出模式一共8种,常用的是PWM1和PWM2,其用法差不多,区别如下:
下表是PWM1和PWM2的区别:
(1)PWM模式1
在该模式下,定时器的计数器从0开始递增,
- 当计数器的值小于CCR时,输出为高电平;
- 当计数器的值大于等于CCR时,输出为低电平;
- 在计数器达到ARR时,产生一个更新事件,计数器重新从0开始计数。
这种模式下,PWM信号的周期由ARR决定,占空比由CCR决定。
(2)PWM模式2
与PWM模式1相比,PWM模式2输出有效性正好是相反的。
下表是PWM1和PWM2的比较:
| 模式 | CNT 计算方式 | CNT<CCR | CNT>CCR |
|---|---|---|---|
| PWM1 | 递增 | 通道CH有效 | 通道CH无效 |
| PWM1 | 递减 | 通道CH无效 | 通道CH有效 |
| PWM2 | 递增 | 通道CH无效 | 通道CH有效 |
| PWM2 | 递减 | 通道CH有效 | 通道CH无效 |
3. 边沿对齐与中心对齐
(1)边沿对齐模式
- 在边沿对齐模式下,PWM信号的起始位置位于PWM周期的起始边沿(即ARR),然后递增至CCR,再递增至ARR,最后重复此过程。
- PWM信号的高电平和低电平都与PWM周期的边沿对齐,即从PWM周期的起始边沿开始。
- 边沿对齐模式通常用于需要高精度输出的应用,例如需要精确控制PWM信号的起始和终止时间的应用场景。
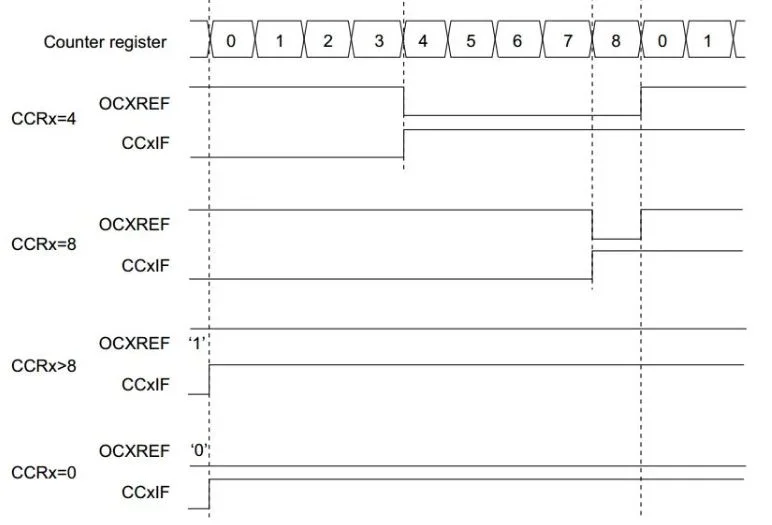
以上图为例,TIMx_CR1寄存器的DIR位为低时,递增计数,设ARR=8,当CCRx=4时: - CNT从0增至3的时候,输出PWM参考信号0CxREF为有效的高电平;
- CNT从4到8的时候,0CxREF输出为低电平;
0CXREF表示定时器的比较器
(2)中心对齐模式
- 在中心对齐模式下,PWM信号的起始位置位于PWM周期的中间,然后递增至CCR,再递减至0,再重复此过程。
- PWM信号的高电平和低电平都与PWM周期的中心对齐,即从PWM周期的中间开始。
- 中心对齐模式通常用于需要调节占空比范围较大的应用,例如需要在PWM周期内任意调节占空比的应用场景。由于PWM信号的起始位置位于PWM周期的中间,因此可以实现更宽范围的占空比调节。
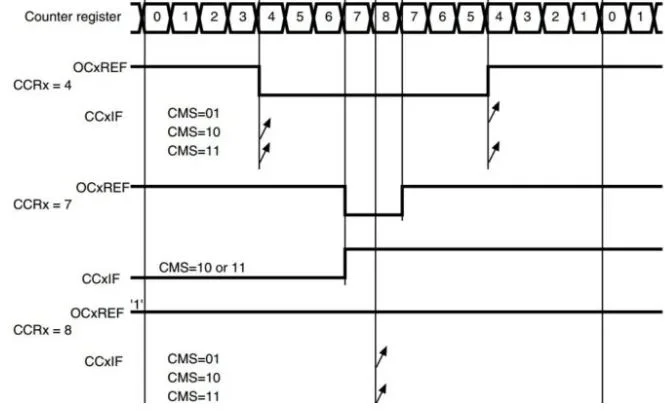
以上图为例,设ARR=8,当CCRx=4时,
- 当CNT<CCRx,输出为有效信号高电平 ;
- 当CNT>CCRx,输出为有效信号低电平;
四、PWM输出配置步骤
PWM 的配置在库文件 time.c 中。
1. 使能定时器及端口时钟
下面是使能设置代码:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
2. 定时器的重映像
后面示例的 PWM 需要配置引脚的复用功能(重映像),定时器的重映像可在《STM32F10x参考手册》查询,摘录如下:
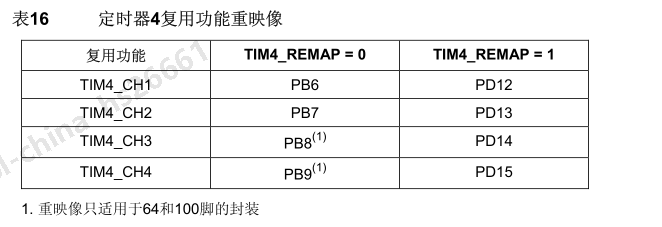
(1)定时器4复用功能重映像
(2)定时器3复用功能重映像

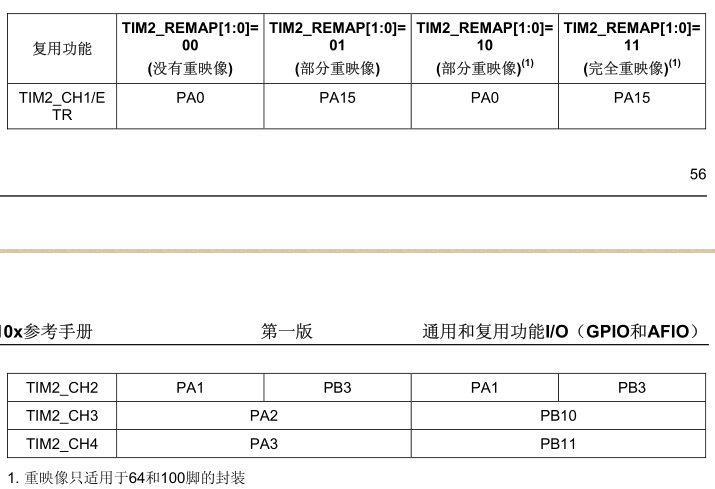
(3) 定时器2复用功能重映像
以使用 TIM3 的通道1为例,它默认是在PA6引脚上,它完全重映像是在PC6,后面使用的开发板上原理图示:
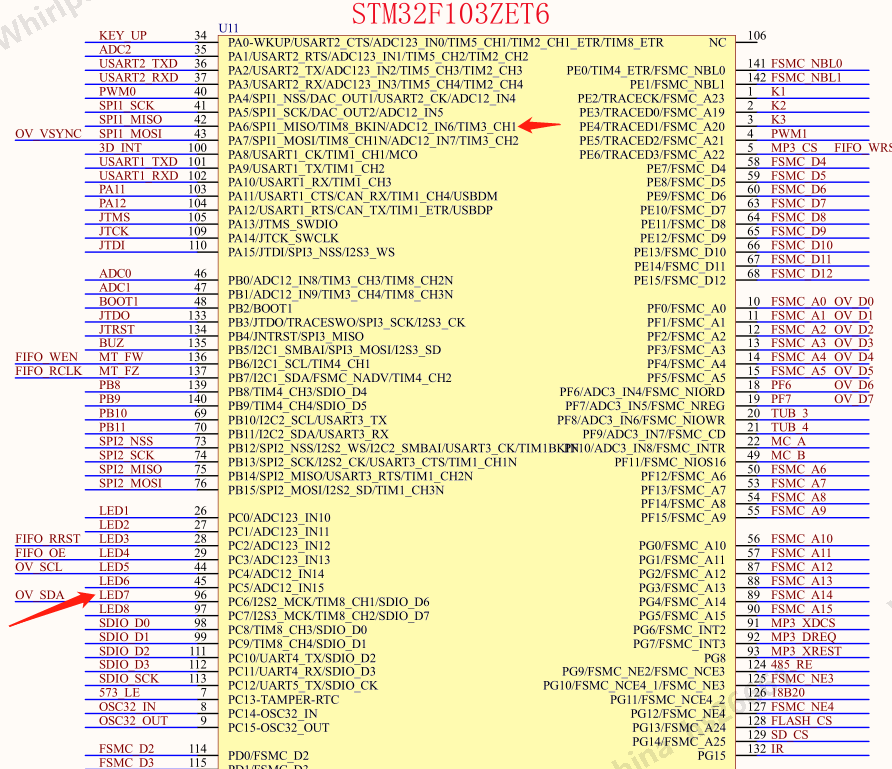
示例代码将使用PC6输出TIM3的通道1 PWM波。
代码示例:
// 设置 TIM3 完全重映像
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
3. 输出端口复用
在输出PWM信号时,通常需要考虑信号的稳定性、噪声抑制以及输出电流的能力等因素。复用推挽输出是一种常见的配置方式。
// 复用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
4. 初始化定时器参数
包括 : 自动重载值、分频系数、计数方式等。
void TIM_TimeBaseInit(TIM_TypeDef*TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStructure)
5. 初始化PWM输出参数
包括 :PWM 模式、输出极性、使能等。
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStructure);
// 结构体定义
typedef struct
{
uint16_t TIM_OCMode; // 比较输出模式
uint16_t TIM_OutputState; // 比较输出使能
uint16_t TIME_OutputNState: // 比较互补输出使能
uint32_t TIM_Pulse; // 脉冲宽度 0~65535
/**
* 输出极性
* * TIM_OCPolarity_High: 高电平有效
* * TIM_OCPolarity_Low: 低电平有效
*/
uint16_t TIM_OCPolarity;
/**
* 互补比较输出极性
* * TIM_OCNPolarity_High: 高电平有效
* * TIM_OCNPolarity_Low: 低电平有效
*/
uint16_t TIM_OCNPolarity;
/**
* 空闲状态下比较输出状态
* * TIM_OCIdleState_Set: 置位
* * TIM_OCIdleState_Reset: 复位
*/
uint16_t TIM_OCIdleState;
/**
* 空闲状态下比较输出状态
* * TIM_OCNIdleState_Set: 置位
* * TIM_OCNIdleState_Reset: 复位
*/
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
6. 开启定时器
// NewState: 新的状态,可以是 ENABLE 或 DISABLE。
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
7. 修改TIMx_CCRx的值控制占空比
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint32_t Compare1);
8. 使能 TIMx 在 CCRx 上的预装载寄存器
// 参数 TIM_OCPreload 可为 TIM_OCPreload_Enable、TIM_OCPreload_Disable
void TIM_OCxPreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
9. 使能 TIMx 在 ARR上的预装载寄存器允许位
// NewState: 新的状态,可以是 ENABLE 或 DISABLE。
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
10. 设置 MOE位
对于高级定时器,需要设置MOE位。
MOE 位,全称 Master Output Enable,是定时器控制寄存器 1 (TIMx->CR1) 中的一个控制位(15位),用于使能或禁用定时器主输出。
- MOE 位可以用于控制 PWM 输出的使能和禁用。
- 可以使用 MOE 位来实现软启动和软停止功能。
- 可以使用 MOE 位来实现故障保护功能。
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
五、代码示例
本实验对TIM3控制,使用通道1, 对TIM3_CH1重映像到PC6引脚,控制PC6上接的LED亮度。
示例程序控制LED呼吸灯效果,渐渐变亮,再渐渐变暗。
1. pwm_utils.h
#ifndef __PWM_UTILS_H__
#define __PWM_UTILS_H__
#include "stm32f10x.h"
void tim3_ch1_pwm_init(u16 preriod, u16 prescaler);
void tim3_ch1_pwm_set_duty(u16 duty);
#endif
2. pwm_utils.c
#include "pwm_utils.h"
#include "led_utils.h"
/**
* @brief 定时器3初始化
*/
void tim3_ch1_pwm_init(u16 preriod, u16 prescaler){
// 使能TIM3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// 使能LED所在端口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
// 使能AFIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度为50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //设置为推挽输出模式
GPIO_Init(LED_PORT, &GPIO_InitStructure); //初始化 LED_PORT
// 管脚重映像
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
// 定时器初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = preriod; //设置自动重装载寄存器周期值
TIM_TimeBaseStructure.TIM_Prescaler = prescaler; //设置时钟预分频数
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频因子
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
// 初始化
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
// PWM模式1
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
// 使能TIM3的CCR1寄存器预装载
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
// 使能TIM3的ARR寄存器预装载
TIM_ARRPreloadConfig(TIM3, ENABLE);
// 使能TIM3
TIM_Cmd(TIM3, ENABLE);
}
void tim3_ch1_pwm_set_duty(u16 duty){
// 设置定时器3的PWM占空比
TIM_SetCompare1(TIM3, duty);
}
3. main函数实现
#include "gpio_utils.h"
#include "stm32f10x.h"
#include "sys_tick_utils.h"
#include "led_utils.h"
#include "pwm_utils.h"
// 主函数
int main(void)
{
// led 初始化
custom_led_init();
// tick 初始化
sys_tick_init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// PWM 初始化,2K
tim3_ch1_pwm_init(500, 72-1);
led_all_off();
int i = 0;
u8 direction=0;
while (1) //无限循环
{
tim3_ch1_pwm_set_duty(i);
if(direction==0){
i++;
}else{
i--;
}
if(i>300){
direction = 1;
}else if(i<1){
direction = 0;
}
delay_ms(10);
}
}
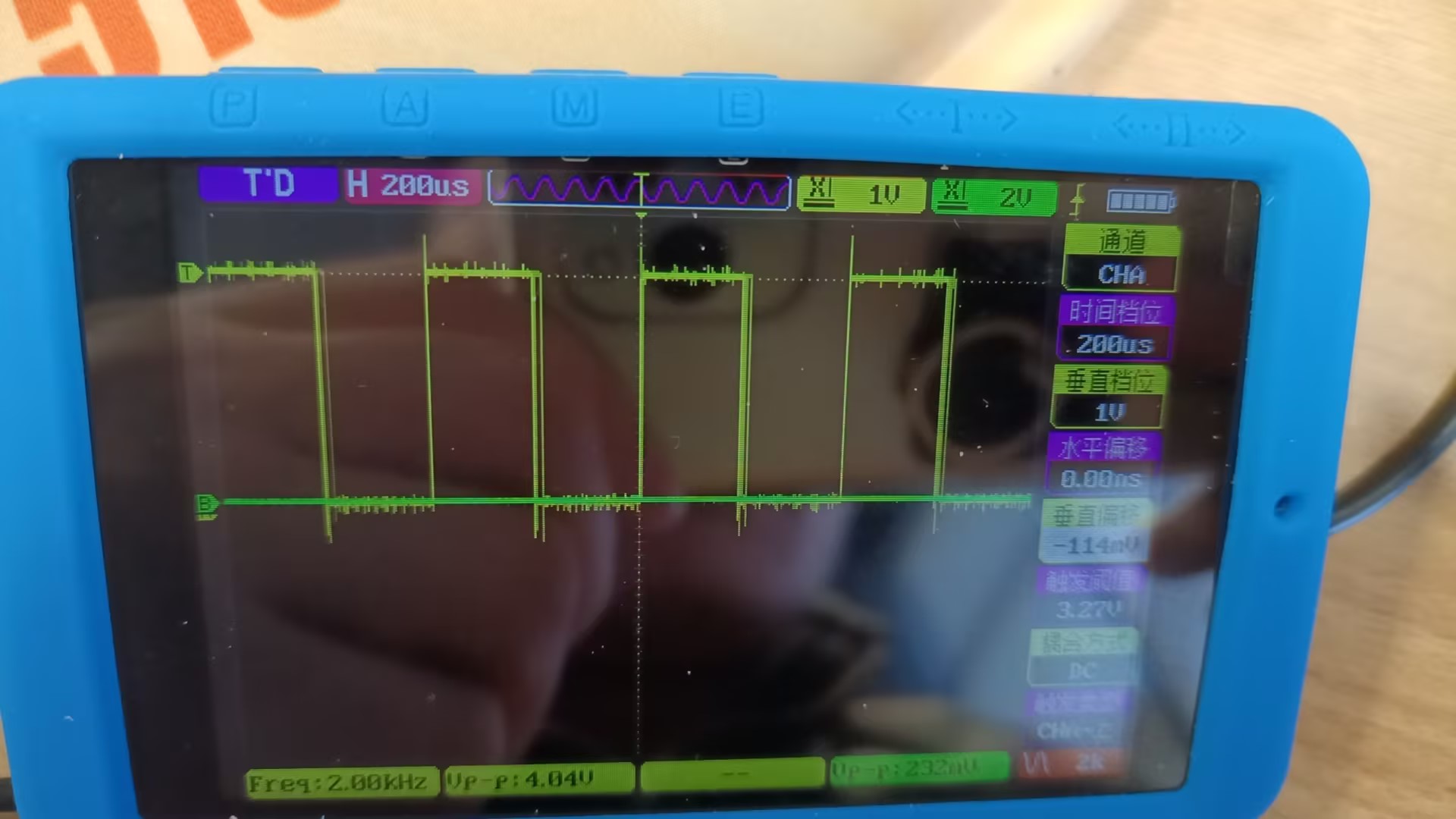
实测PC6的波形是一直变化中:
本文代码开源地址:
https://gitee.com/xundh/stm32_arm_learn