文章目录
- 前言
- 一、有哪些工作模式?
- 1.1 GPIO的详细介绍
- 1.2 GPIO的内部框图
- 输入模式
- 输出部分
- 二、GPIO操作函数
- 2.1 GPIO 汇总
- 2.2 GPIO操作函数
- gpio_config配置引脚
- reset 引脚函数
- 设置引脚电平
- 选中对应引脚
- 设置引脚的方向
- 2.3 点亮第一个灯
- 三、流水灯
- 总结
前言
ESP32是一款功能强大的微控制器,广泛应用于物联网(IoT)和嵌入式系统开发中。ESP32的开发环境包括ESP-IDF(Espressif IoT Development Framework),它提供了丰富的工具和库,使开发人员能够充分利用ESP32的性能和功能。
本文旨在介绍ESP32 IDF的快速入门,通过简单的示例演示如何点亮第一个LED灯和实现流水灯效果。这些基础示例将帮助初学者了解如何使用ESP32 IDF进行开发,并为后续的项目打下基础。
一、有哪些工作模式?
1.1 GPIO的详细介绍
GPIO是General-purpose and alternate-function I/Os的缩写
他的含义是:通用和复用的引脚
GPIO是分组的,每一组有很多引脚
比如说PA0、PA1…PA15,一组GPIO有16个引脚
组数是由芯片决定的,具体的组数可以看对应的芯片的原理图
1.2 GPIO的内部框图
我们可以在芯片手册中找到GPIO的对应框图,他说对于某一个引脚的:
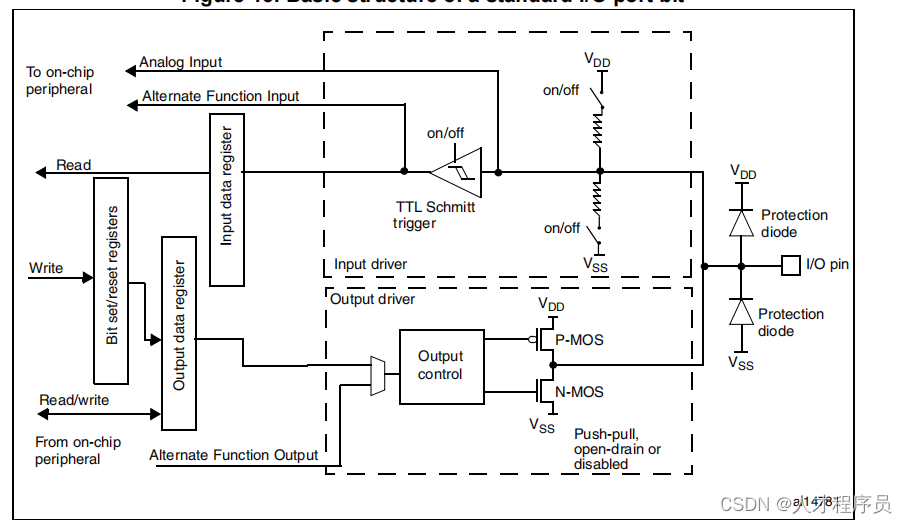
他可以分为两部分,上部分就是输入,下部分就是输出
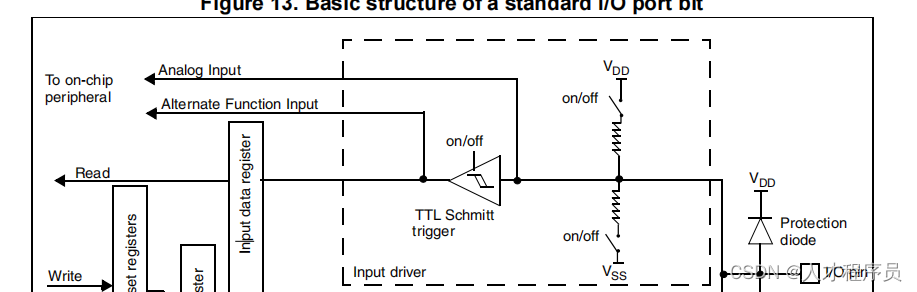
输入模式
输入模式的框图如下:
要理解他,我们可以看下面的图:
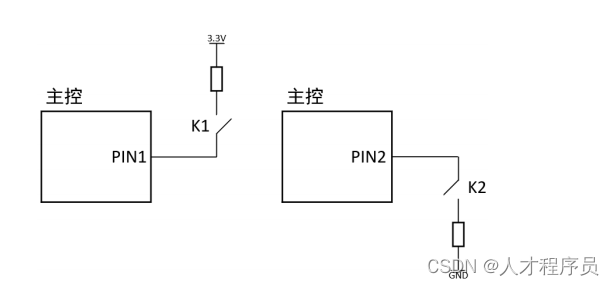
我们通过配置pin1让他为输入,然后我们读某个寄存器就可以得到他的状态。
当k1按下,接到电源,那么pin肯定状态是1高电平,如果没有按下,相当于这个引脚是悬空状态
那么你读这个值,你知道他是什么状态吗,可能读出来是1,可以是0
再比如,我们配置pin2让他为输入,和上面一样,我们也去读,按下时为0,那么没有按下是什么状态呢,就和上面的是一样的了
那么我们怎么解决他这个问题呢
对于pin1我们可以加一个下拉电阻

那么他按下时就就会是高电平,没按就是低电平
同样的对于pin2,就需要加上拉电阻了
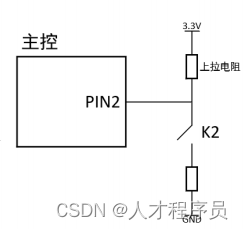
那么他按下时就就会是低电平,没按就是高电平
所以上下拉电阻是需要看实际的情况来选择的。
这些电阻集成到了芯片,我们可以直接设置他,是上拉还是下拉,我们就不用每一个都搞一个电阻了
回到框图:
其中,里面的VDD为上拉电阻
Vss为下拉电阻,他在芯片中已经设计好的了
还有一种输入就是 Analog Input,模拟输入,那么模拟输入的话,他需要得到具体的电压值,所以我们不能设置上下拉电阻,完全由外部电路控制,要不然模拟输入和直接输入没两样了
那么输入就是这几部分:上拉输入、下拉输入、浮空输入、模拟输入
在最后我们通过读取输入寄存器:Input data register,得到1/0
如果说他有毛刺怎么办:他会在某一个范围电压内为1,某一个电压范围为0
输出部分
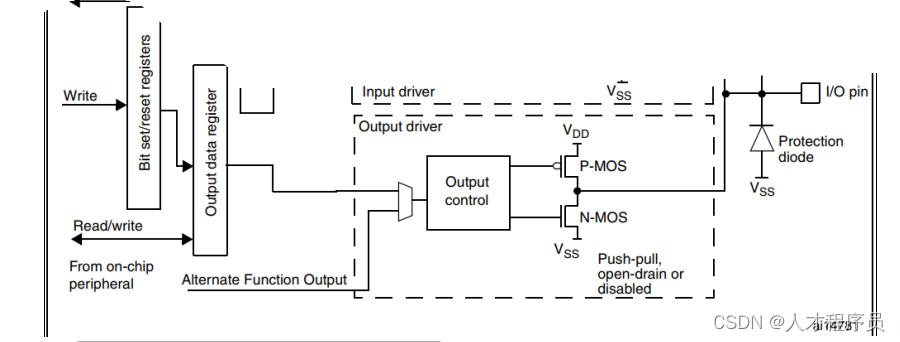
他这个GPIO可以接到一个灯,或者其他的芯片
如果是点灯,那么电压肯定是越高越好
如果是关灯,电压肯定是越低越好
当输出1时,I/O pin连接到P-MOS的VDD,然后就能点灯了
如果输出0,P-MOS断开,连接地,所以就关灯
推挽输出:当你要高电平,就推到VDD,如果要低电平,就推到VSS这样就是推挽输出,可以输出高低电平
开漏输出:
在开漏输出中,有两种状态:开和关。当开漏输出为开启状态时,它会将电路连接到地(或负极),使得电路的输出变为低电平。而当开漏输出为关闭状态时,它不会连接到任何地方,使得电路的输出由外部设备或其他电路来控制。
开漏输出一般是用来解决两个芯片通信的问题的
不至于把两个芯片搞坏
二、GPIO操作函数
2.1 GPIO 汇总
ESP32 芯片具有 34 个物理 GPIO 管脚(GPIO0 ~ GPIO19、GPIO21 ~ GPIO23、GPIO25 ~ GPIO27 和 GPIO32 ~ GPIO39)。每个管脚都可用作一个通用 IO,或连接一个内部的外设信号。通过 IO MUX、RTC IO MUX 和 GPIO 交换矩阵,可配置外设模块的输入信号来源于任何的 IO 管脚,并且外设模块的输出信号也可连接到任意 IO 管脚。这些模块共同组成了芯片的 IO 控制。
2.2 GPIO操作函数
在使用GPIO之前,你需要加上这个头文件:#include "driver/gpio.h"
gpio_config配置引脚
我们可以使用下面这个函数对一个GPIO进行配置:
esp_err_t gpio_config(const gpio_config_t *pGPIOConfig);
他的参数是一个结构体,他的类型如下:
typedef struct {
uint64_t pin_bit_mask; /*!< GPIO pin: set with bit mask, each bit maps to a GPIO */
gpio_mode_t mode; /*!< GPIO mode: set input/output mode */
gpio_pullup_t pull_up_en; /*!< GPIO pull-up */
gpio_pulldown_t pull_down_en; /*!< GPIO pull-down */
gpio_int_type_t intr_type; /*!< GPIO interrupt type */
} gpio_config_t;
pin_bit_mask:
作用:用于设置GPIO引脚。每个位(bit)对应一个GPIO引脚,通过位掩码的方式来选择要配置的GPIO引脚。
类型:uint64_t,64位的整数类型。
比如把GPIO10设置:
gpio_config_t gpio_conf;
gpio_conf.pin_bit_mask = (1ULL << 10); // 将第10位设置为1,表示选择GPIO10
mode:
作用:设置GPIO引脚的工作模式,即输入模式(input)还是输出模式(output)。
类型:gpio_mode_t,是一个枚举类型,可能的取值包括 GPIO_MODE_INPUT 和 GPIO_MODE_OUTPUT。
pull_up_en:
作用:启用或禁用GPIO引脚的上拉电阻。
类型:gpio_pullup_t,是一个枚举类型,可能的取值包括 GPIO_PULLUP_DISABLE 和 GPIO_PULLUP_ENABLE。
pull_down_en:
作用:启用或禁用GPIO引脚的下拉电阻。
类型:gpio_pulldown_t,是一个枚举类型,可能的取值包括 GPIO_PULLDOWN_DISABLE 和 GPIO_PULLDOWN_ENABLE。
intr_type:
作用:配置GPIO引脚的中断类型,即何种事件会触发中断。
类型:gpio_int_type_t,是一个枚举类型,可能的取值包括 GPIO_INTR_DISABLE、GPIO_INTR_ANYEDGE、GPIO_INTR_NEGEDGE 和 GPIO_INTR_POSEDGE。分别表示禁用中断、任意边沿触发、下降沿触发和上升沿触发。
他的放回值为esp_err_t类型,他是一个int类型
他有如下的取值
/* Definitions for error constants. */
#define ESP_OK 0 /*!< esp_err_t value indicating success (no error) */
#define ESP_FAIL -1 /*!< Generic esp_err_t code indicating failure */
#define ESP_ERR_NO_MEM 0x101 /*!< Out of memory */
#define ESP_ERR_INVALID_ARG 0x102 /*!< Invalid argument */
#define ESP_ERR_INVALID_STATE 0x103 /*!< Invalid state */
#define ESP_ERR_INVALID_SIZE 0x104 /*!< Invalid size */
#define ESP_ERR_NOT_FOUND 0x105 /*!< Requested resource not found */
#define ESP_ERR_NOT_SUPPORTED 0x106 /*!< Operation or feature not supported */
#define ESP_ERR_TIMEOUT 0x107 /*!< Operation timed out */
#define ESP_ERR_INVALID_RESPONSE 0x108 /*!< Received response was invalid */
#define ESP_ERR_INVALID_CRC 0x109 /*!< CRC or checksum was invalid */
#define ESP_ERR_INVALID_VERSION 0x10A /*!< Version was invalid */
#define ESP_ERR_INVALID_MAC 0x10B /*!< MAC address was invalid */
#define ESP_ERR_WIFI_BASE 0x3000 /*!< Starting number of WiFi error codes */
#define ESP_ERR_MESH_BASE 0x4000 /*!< Starting number of MESH error codes */
#define ESP_ERR_FLASH_BASE 0x6000 /*!< Starting number of flash error codes */
#define ESP_ERR_HW_CRYPTO_BASE 0xc000 /*!< Starting number of HW cryptography module error codes */
reset 引脚函数
我们可以使用下面这个函数重置指定的引脚:
esp_err_t gpio_reset_pin(gpio_num_t gpio_num);
他的参数是一个枚举,里面有所有的引脚定义:
typedef enum {
GPIO_NUM_NC = -1, /*!< Use to signal not connected to S/W */
GPIO_NUM_0 = 0, /*!< GPIO0, input and output */
GPIO_NUM_1 = 1, /*!< GPIO1, input and output */
GPIO_NUM_2 = 2, /*!< GPIO2, input and output */
GPIO_NUM_3 = 3, /*!< GPIO3, input and output */
GPIO_NUM_4 = 4, /*!< GPIO4, input and output */
GPIO_NUM_5 = 5, /*!< GPIO5, input and output */
GPIO_NUM_6 = 6, /*!< GPIO6, input and output */
GPIO_NUM_7 = 7, /*!< GPIO7, input and output */
GPIO_NUM_8 = 8, /*!< GPIO8, input and output */
GPIO_NUM_9 = 9, /*!< GPIO9, input and output */
GPIO_NUM_10 = 10, /*!< GPIO10, input and output */
GPIO_NUM_11 = 11, /*!< GPIO11, input and output */
GPIO_NUM_12 = 12, /*!< GPIO12, input and output */
GPIO_NUM_13 = 13, /*!< GPIO13, input and output */
GPIO_NUM_14 = 14, /*!< GPIO14, input and output */
GPIO_NUM_15 = 15, /*!< GPIO15, input and output */
GPIO_NUM_16 = 16, /*!< GPIO16, input and output */
GPIO_NUM_17 = 17, /*!< GPIO17, input and output */
GPIO_NUM_18 = 18, /*!< GPIO18, input and output */
GPIO_NUM_19 = 19, /*!< GPIO19, input and output */
GPIO_NUM_20 = 20, /*!< GPIO20, input and output */
GPIO_NUM_21 = 21, /*!< GPIO21, input and output */
GPIO_NUM_22 = 22, /*!< GPIO22, input and output */
GPIO_NUM_23 = 23, /*!< GPIO23, input and output */
GPIO_NUM_25 = 25, /*!< GPIO25, input and output */
GPIO_NUM_26 = 26, /*!< GPIO26, input and output */
GPIO_NUM_27 = 27, /*!< GPIO27, input and output */
GPIO_NUM_28 = 28, /*!< GPIO28, input and output */
GPIO_NUM_29 = 29, /*!< GPIO29, input and output */
GPIO_NUM_30 = 30, /*!< GPIO30, input and output */
GPIO_NUM_31 = 31, /*!< GPIO31, input and output */
GPIO_NUM_32 = 32, /*!< GPIO32, input and output */
GPIO_NUM_33 = 33, /*!< GPIO33, input and output */
GPIO_NUM_34 = 34, /*!< GPIO34, input mode only */
GPIO_NUM_35 = 35, /*!< GPIO35, input mode only */
GPIO_NUM_36 = 36, /*!< GPIO36, input mode only */
GPIO_NUM_37 = 37, /*!< GPIO37, input mode only */
GPIO_NUM_38 = 38, /*!< GPIO38, input mode only */
GPIO_NUM_39 = 39, /*!< GPIO39, input mode only */
GPIO_NUM_MAX,
/** @endcond */
} gpio_num_t;
你可以直接填写引脚数字即可。
设置引脚电平
我们可以使用下面这个函数来设置指定引脚的电平:
esp_err_t gpio_set_level(gpio_num_t gpio_num, uint32_t level)
参数1为设置哪个引脚,参数2为是高电平还是低电平
选中对应引脚
我们可以使用下面的函数使物理引脚转换成GPIO引脚:
void gpio_pad_select_gpio(uint8_t gpio_num);
例如:
gpio_pad_select_gpio(10);
设置引脚的方向
我们可以使用下面函数来设置引脚是输入模式还是输出模式:
esp_err_t gpio_set_direction(gpio_num_t gpio_num, gpio_mode_t mode)
其参数2为一个枚举类型,下面为他的定义:
typedef enum {
GPIO_MODE_DISABLE = GPIO_MODE_DEF_DISABLE, /*!< GPIO mode : disable input and output */
GPIO_MODE_INPUT = GPIO_MODE_DEF_INPUT, /*!< GPIO mode : input only */
GPIO_MODE_OUTPUT = GPIO_MODE_DEF_OUTPUT, /*!< GPIO mode : output only mode */
GPIO_MODE_OUTPUT_OD = ((GPIO_MODE_DEF_OUTPUT) | (GPIO_MODE_DEF_OD)), /*!< GPIO mode : output only with open-drain mode */
GPIO_MODE_INPUT_OUTPUT_OD = ((GPIO_MODE_DEF_INPUT) | (GPIO_MODE_DEF_OUTPUT) | (GPIO_MODE_DEF_OD)), /*!< GPIO mode : output and input with open-drain mode*/
GPIO_MODE_INPUT_OUTPUT = ((GPIO_MODE_DEF_INPUT) | (GPIO_MODE_DEF_OUTPUT)), /*!< GPIO mode : output and input mode */
} gpio_mode_t;
2.3 点亮第一个灯
gpio_reset_pin(22);
gpio_pad_select_gpio(22);
gpio_set_direction(22,GPIO_MODE_OUTPUT);
for(int i = 0;i<10;i++)
{
gpio_set_level(22,1);
vTaskDelay(100);
gpio_set_level(22,0);
vTaskDelay(100);
}
三、流水灯
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/gpio.h"
#define LED_GPIO_1 GPIO_NUM_25
#define LED_GPIO_2 GPIO_NUM_26
#define LED_GPIO_3 GPIO_NUM_27
void app_main() {
// 配置GPIO引脚
gpio_pad_select_gpio(LED_GPIO_1);
gpio_pad_select_gpio(LED_GPIO_2);
gpio_pad_select_gpio(LED_GPIO_3);
gpio_set_direction(LED_GPIO_1, GPIO_MODE_OUTPUT);
gpio_set_direction(LED_GPIO_2, GPIO_MODE_OUTPUT);
gpio_set_direction(LED_GPIO_3, GPIO_MODE_OUTPUT);
while (1) {
// 依次点亮LED
gpio_set_level(LED_GPIO_1, 1);
vTaskDelay(500 / portTICK_PERIOD_MS);
gpio_set_level(LED_GPIO_1, 0);
gpio_set_level(LED_GPIO_2, 1);
vTaskDelay(500 / portTICK_PERIOD_MS);
gpio_set_level(LED_GPIO_2, 0);
gpio_set_level(LED_GPIO_3, 1);
vTaskDelay(500 / portTICK_PERIOD_MS);
gpio_set_level(LED_GPIO_3, 0);
}
}
总结
通过本文的介绍,读者可以快速了解如何在ESP32上使用ESP-IDF进行开发。我们首先介绍了如何点亮第一个LED灯,通过简单的代码演示了如何配置GPIO并控制LED的状态。接着,我们进一步展示了如何实现流水灯效果,通过循环控制多个LED的状态,从而创建动态的灯光效果。
这些示例不仅帮助读者熟悉ESP32的开发流程和基本操作,还为他们提供了一个良好的起点,使他们能够深入学习ESP32的更高级功能和应用。ESP32 IDF提供了丰富的文档和示例代码,读者可以进一步探索和实践,开发出更加复杂和功能丰富的项目。