绘图函数:
时间进度条:
timebar(用起来简单)
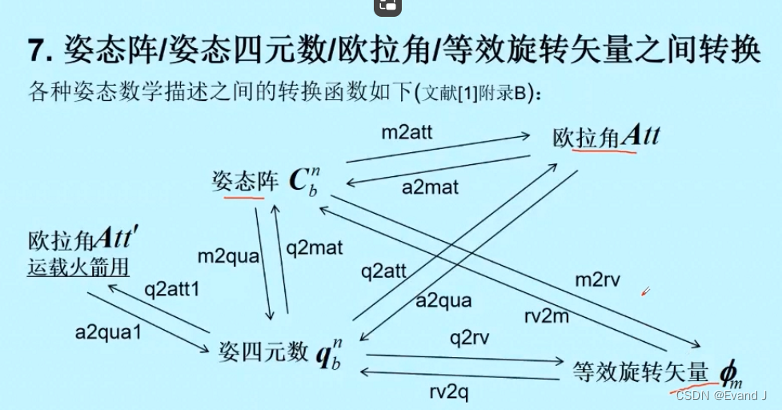
姿态转换:
欧拉角、姿态矩阵、等效旋转矩阵、姿态四元数、运载火箭使用的欧拉角之间的转换。
轨迹生成:
seg = trjsegment(seg, segtype, lasting, w, a, var1)
输出值seg是轨迹片段片段,作者是一段一段生成轨迹的,每一段的轨迹放在前一段的后面
• Segtype:几种基本运行类型的选择,用单引号括住
○ init:初始化 uniform:静止 Accelerate/deaccelerate:加减速
Coturnleft:向左转弯 coturnright:向右转弯 Clmb/decent:上升/下降
• Lasting:本段路程持续时间
• W:角速率(若有,单位是角度)
• A:加速度(若有)
• Var1:输出类型
输出的seg里面的wat是一个8列的矩阵,第一列代表每一个阶段的持续时间,第二列代表该阶段的速度(大小),35列分别为:角速率、68为三轴加速度(6为转弯、7为前项,8为爬坡时的)
trj = trjsimu(avp0, wat, ts, repeats)
输出值trj是
• Avp0:初始的AVP
• Wat:轨迹片段,与trjsegment函数一起使用,这里即为输出的seg的seg.wat
• Ts:采样周期
repeats:重复次数,忽略时即视为0,用nargin判断输入参数的量