源码下载:https://download.csdn.net/download/mao0514/88915667
win10 64位系统+vs2019+wdk
inf安装:


VOID
UMDF2Driver1EvtIoDeviceControl(
_In_ WDFQUEUE Queue,
_In_ WDFREQUEST Request,
_In_ size_t OutputBufferLength,
_In_ size_t InputBufferLength,
_In_ ULONG IoControlCode
)
/*++
Routine Description:
This event is invoked when the framework receives IRP_MJ_DEVICE_CONTROL request.
Arguments:
Queue - Handle to the framework queue object that is associated with the
I/O request.
Request - Handle to a framework request object.
OutputBufferLength - Size of the output buffer in bytes
InputBufferLength - Size of the input buffer in bytes
IoControlCode - I/O control code.
Return Value:
VOID
--*/
{
TraceEvents(TRACE_LEVEL_INFORMATION,
TRACE_QUEUE,
"%!FUNC! Queue 0x%p, Request 0x%p OutputBufferLength %d InputBufferLength %d IoControlCode %d",
Queue, Request, (int) OutputBufferLength, (int) InputBufferLength, IoControlCode);
CHAR n, c[] = "壹贰叁肆伍陆柒捌玖零";
PVOID buffer, outbuf;
NTSTATUS status = 0;
switch (IoControlCode)
{
case CHAR_IOCTL_800:
if (InputBufferLength == 0 || OutputBufferLength == 0)
{
WdfRequestComplete(Request, STATUS_INVALID_PARAMETER);
break;
}
else
{
status = WdfRequestRetrieveInputBuffer(Request, 1, &buffer, NULL);
if (!NT_SUCCESS(status))
{
WdfRequestComplete(Request, STATUS_UNSUCCESSFUL);
break;
}
status = WdfRequestRetrieveOutputBuffer(Request, 2, &outbuf/*outbuf指针的指针*/, NULL);
if (!NT_SUCCESS(status))
{
WdfRequestComplete(Request, STATUS_UNSUCCESSFUL);
break;
}
n = *(unsigned char*)buffer;
KdPrint(("read base0 %x %x", 0, *(unsigned int*)buffer));
memcpy((unsigned char*)outbuf, (unsigned char*)(c+2*n),2);
WdfRequestCompleteWithInformation(Request, STATUS_SUCCESS, 2);
}
break;
default:
status = STATUS_INVALID_DEVICE_REQUEST;
WdfRequestCompleteWithInformation(Request, status, 0);
break;
}
// WdfRequestComplete(Request, STATUS_SUCCESS);
return;
}应用端:
//pub.h
#include <initguid.h>
DEFINE_GUID(GUID_DEVINTERFACE_UMDF2Driver1,
0xd63d7565, 0xb448, 0x45cb, 0xa2, 0x4b, 0xe7, 0x32, 0x65, 0x1d, 0x45, 0x29);
// {d63d7565-b448-45cb-a24b-e732651d4529}
#define CHAR_IOCTL_800 CTL_CODE(FILE_DEVICE_UNKNOWN, 0x800, METHOD_BUFFERED, FILE_ANY_ACCESS)
//api
#include <windows.h>
#include <setupapi.h>
#include <stdio.h>
#include <stdlib.h>
#include <conio.h>
#include <winioctl.h>
//
#pragma comment(lib,"setupapi.lib")
PCHAR
GetDevicePath(
IN LPGUID InterfaceGuid
)
{
HDEVINFO HardwareDeviceInfo;
SP_DEVICE_INTERFACE_DATA DeviceInterfaceData;
PSP_DEVICE_INTERFACE_DETAIL_DATA DeviceInterfaceDetailData = NULL;
ULONG Length, RequiredLength = 0;
BOOL bResult;
HardwareDeviceInfo = SetupDiGetClassDevs(
InterfaceGuid,
NULL,
NULL,
(DIGCF_PRESENT | DIGCF_DEVICEINTERFACE));
if (HardwareDeviceInfo == INVALID_HANDLE_VALUE) {
printf("SetupDiGetClassDevs failed!\n");
exit(1);
}
DeviceInterfaceData.cbSize = sizeof(SP_DEVICE_INTERFACE_DATA);
bResult = SetupDiEnumDeviceInterfaces(HardwareDeviceInfo,
0,
InterfaceGuid,
0,
&DeviceInterfaceData);
if (bResult == FALSE) {
/*
LPVOID lpMsgBuf;
if (FormatMessage(FORMAT_MESSAGE_ALLOCATE_BUFFER |
FORMAT_MESSAGE_FROM_SYSTEM |
FORMAT_MESSAGE_IGNORE_INSERTS,
NULL,
GetLastError(),
MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT),
(LPSTR) &lpMsgBuf,
0,
NULL
)) {
printf("Error: %s", (LPSTR)lpMsgBuf);
LocalFree(lpMsgBuf);
}
*/
printf("SetupDiEnumDeviceInterfaces failed.\n");
SetupDiDestroyDeviceInfoList(HardwareDeviceInfo);
exit(1);
}
SetupDiGetDeviceInterfaceDetail(
HardwareDeviceInfo,
&DeviceInterfaceData,
NULL,
0,
&RequiredLength,
NULL
);
DeviceInterfaceDetailData = (PSP_DEVICE_INTERFACE_DETAIL_DATA)LocalAlloc(LMEM_FIXED, RequiredLength);
if (DeviceInterfaceDetailData == NULL) {
SetupDiDestroyDeviceInfoList(HardwareDeviceInfo);
printf("Failed to allocate memory.\n");
exit(1);
}
DeviceInterfaceDetailData->cbSize = sizeof(SP_DEVICE_INTERFACE_DETAIL_DATA);
Length = RequiredLength;
bResult = SetupDiGetDeviceInterfaceDetail(
HardwareDeviceInfo,
&DeviceInterfaceData,
DeviceInterfaceDetailData,
Length,
&RequiredLength,
NULL);
if (bResult == FALSE) {
/*
LPVOID lpMsgBuf;
if (FormatMessage(FORMAT_MESSAGE_ALLOCATE_BUFFER |
FORMAT_MESSAGE_FROM_SYSTEM |
FORMAT_MESSAGE_IGNORE_INSERTS,
NULL,
GetLastError(),
MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT),
(LPSTR) &lpMsgBuf,
0,
NULL
)) {
MessageBox(NULL, (LPCTSTR) lpMsgBuf, "Error", MB_OK);
LocalFree(lpMsgBuf);
}
*/
printf("Error in SetupDiGetDeviceInterfaceDetail\n");
SetupDiDestroyDeviceInfoList(HardwareDeviceInfo);
LocalFree(DeviceInterfaceDetailData);
exit(1);
}
return DeviceInterfaceDetailData->DevicePath;
}
HANDLE hDevice = INVALID_HANDLE_VALUE;
void CMFCApplication1Dlg::OnBnClickedButton1()
{
// TODO: 在此添加控件通知处理程序代码
PCHAR DevicePath;
DevicePath = GetDevicePath((LPGUID)&GUID_DEVINTERFACE_UMDF2Driver1);
hDevice = CreateFile(DevicePath,
GENERIC_READ | GENERIC_WRITE,
FILE_SHARE_READ | FILE_SHARE_WRITE,
NULL,
OPEN_EXISTING,
0,
NULL);
if (hDevice == INVALID_HANDLE_VALUE) {
MessageBox("err.\n");
return;
}
MessageBox("OK.\n");
}
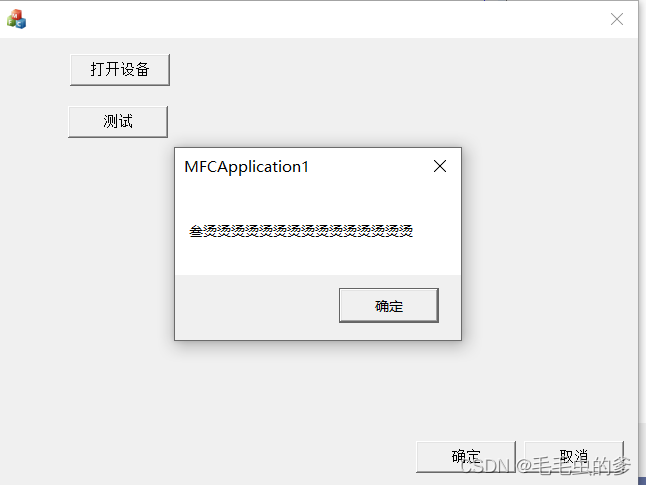
void CMFCApplication1Dlg::OnBnClickedButton2()
{
// TODO: 在此添加控件通知处理程序代码
CHAR bufInput[1]; // Input to device
CHAR bufOutput[2]; // Output from device
ULONG nOutput; // Count written to bufOutput
bufInput[0] = 2;
if (!DeviceIoControl(hDevice,
CHAR_IOCTL_800,
bufInput,
1,
bufOutput,
2,
&nOutput,
NULL)
)
{
MessageBox("err.\n");
return;
}
MessageBox(bufOutput);
CloseHandle(hDevice);
}
![BUUCTF-MISC-[GUET-CTF2019]soul sipse1](https://img-blog.csdnimg.cn/direct/aec076e7092e40d5ba769c95c2186337.png)