VR 全景模式OpenGL原理
VR 全景模式原理
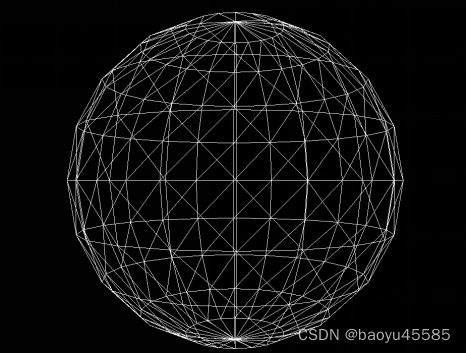
VR 全景模式原理将画面渲染到球面上,相当于从球心去观察内部球面,观察到的画面 360 度无死角,与普通播平面渲染的本质区别在渲染图像部分,画面渲染到一个矩形平面上,而全景需要将画面渲染到球面,利用 OpenGL 构建一个球体。OpenGL ES 中所有 3D 物体均是由三角形构成的,构建一个球体只需要利用球坐标系中的经度角、维度角以及半径计算出球面点的三维坐标,最后这些坐标点构成一个个小矩形,每个矩形就可以分成 2 个三角形。
纬度和经度的含义:
1、首先,纬度是地球表面上某一点与赤道之间的角度,取值范围为-90度到+90度。经度是地球表面上某一点与本初子午线之间的角度,取值范围为-180度到+180度。
2、将纬度和经度转换为弧度表示。OpenGL中的数学函数通常使用弧度作为单位,因此需要将纬度和经度从角度转换为弧度。可以使用以下公式进行转换:
弧度 = 角度 * π / 180
3、根据转换后的纬度和经度计算右手世界坐标。右手世界坐标系是OpenGL中常用的坐标系,其中x轴指向右侧,y轴指向上方,z轴指向观察者的反方向。
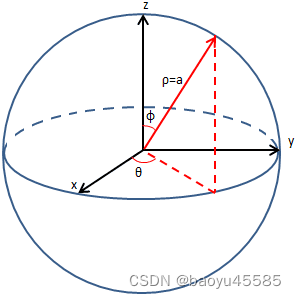
首先,根据纬度和经度计算球面上的点的坐标。可以使用以下公式:
- x = cos(纬度) cos(经度)
- y = sin(纬度)
- z = cos(纬度) sin(经度)
x=r*cosθ*sinsβ
y=r*sinθ
y=r*cosθ*cosβ
球体网格实现
// 这个函数 `createSphere` 用于根据指定的参数在3D空间中生成一个球体网格。
void VR_FullViewSphere3D::createSphere(float radius, int rings, int sectors, void *tag)
{
// 定义必要的变量和常数
float PI = M3D_PI;
float nowradius = radius;
int longtitude = rings;
int latitude = sectors;
float longtiRatio = 1.0f;
float latiRatio = 2.0f;
// 计算所需的顶点、纹理坐标和索引的总数
int numPoints = longtitude * (latitude + 1) * 3;
int numTexcoords = longtitude * (latitude + 1) * 2;
int numIndices = (longtitude - 1) * latitude * 6;
// 为顶点数据、纹理坐标和索引分配内存
m_vertexs1 = (float *)malloc(sizeof(float) * numPoints);
m_texcoords1 = (float *)malloc(sizeof(float) * numTexcoords);
m_indices1 = (short *)malloc(sizeof(short) * numIndices);
int t = 0, v = 0, counter = 0;
float theta = 0.0f, phi = 0.0f;
// 生成顶点和纹理坐标
for (int i = 0; i < longtitude; i++) {
phi = (PI / 2 - i / (longtitude - 1 + 0.0) * PI) * longtiRatio;
for (int j = 0; j < latitude + 1; j++) {
theta = (j / (latitude + 0.0) * PI - PI / 2) * latiRatio;
float r = -nowradius * (float)cosf(phi);
float x = r * (float)sinf(theta);
float y = nowradius * (float)sinf(phi);
float z = r * (float)cosf(theta);
// 分配顶点坐标
m_vertexs1[v++] = x; // X轴
m_vertexs1[v++] = y; // Y轴
m_vertexs1[v++] = z; // Z轴
// 分配纹理坐标
m_texcoords1[t++] = 1.0f - (float)((j + 0.0) / (latitude + 0.0)); // X轴
m_texcoords1[t++] = (float)((i + 0.0) / (longtitude - 1.0)); // Y轴
}
}
// 生成三角形的索引
for (int i = 0; i < longtitude - 1; i++) {
for (int j = 0; j < latitude; j++) {
// 第一个三角形
m_indices1[counter++] = (short)(i * (latitude + 1) + j); // 上顶点
m_indices1[counter++] = (short)(i * (latitude + 1) + j + 1); // 右上顶点
m_indices1[counter++] = (short)((i + 1) * (latitude + 1) + j); // 下顶点
// 第二个三角形
m_indices1[counter++] = (short)((i + 1) * (latitude + 1) + j);
m_indices1[counter++] = (short)(i * (latitude + 1) + j + 1);
m_indices1[counter++] = (short)((i + 1) * (latitude + 1) + j + 1); // 右下顶点
}
}
m_NumIndices = numIndices; // 存储生成的索引总数
}
这个方法根据给定的半径、环数和扇区数,在3D空间中创建一个球体网格。它计算用于渲染球体的顶点、纹理坐标和索引。
在计算球体的纬度角度(phi) 落在 [-π/2, π/2] 的范围时,也就是-90度到+90度,采用了如下的计算方式:
phi = (PI / 2 - i / (longtitude - 1 + 0.0) * PI) * longtiRatio;
这里的目的是为了在球体上均匀生成经线(经度)并控制其分布。详细解释如下:
(longtitude - 1 + 0.0):这里将(longtitude - 1)是类似计算机语言数组下标0开始,目的是为了避免整数相除后得到的结果被截断成整数。i / (longtitude - 1 + 0.0):这一部分将当前经线编号i映射到一个范围在[0, 1]之间的值。当i=0时,表示顶端纬度,i=longtitude-1时表示底端纬度。(PI / 2 - i / (longtitude - 1 + 0.0) * PI):根据上述得到的比例值,乘以π并减去π/2,可以将范围从[0, 1]映射到[π/2, -π/2]之间,即从顶端到底端的纬度范围。longtiRatio:这个参数用于调节经度方向上的角度变化,影响经线所在的位置。
综上所述,这种计算方式能够确保在球体表面上沿着经线均匀生成点,并且通过调节longtiRatio参数,可以控制经线的分布密度或者改变球面形状。
在计算球体的经度角度(theta)落在 [-π, π] 的范围时,也就是-180度到+180度,采用了如下的计算方式:
theta = (j / (latitude + 0.0) * PI - PI / 2) * latiRatio;
这里的目的是为了在球体上均匀生成纬线(纬度)并控制其分布。详细解释如下:
(latitude + 0.0):将latitude转换为浮点数,以避免整数相除后结果被截断成整数。j / (latitude + 0.0):将当前纬线编号j映射到一个范围在[0, 1]之间的值。当j=0时,表示经线从左侧开始,j=latitude时表示经线到达右侧。(j / (latitude + 0.0) * PI - PI / 2):将上述比例乘以π并减去π/2,将范围从[0, 1]映射到[-π/2, π/2]之间,即从左侧到右侧的经线范围。latiRatio:此参数用于调节纬度方向上的角度变化,影响纬线所在的位置,latiRatio=2实现-180度到+180度。