本篇博客用来记录个人学习记录,存放各种文章链接、视频链接、学习历程、实验过程和结果等等....
最近在整无人机项目,接触一下从来没有接触过的飞控...(听着就头晕),本人纯小白。
目录
PX4、Pixhawk、APM、ArduPilot、Dronecode
Dronekit又是什么?
ROS是什么?
1.控制系统
飞控
地面站
2.飞行模式
关于旋翼
关于坐标系
3.器件、设备等
遥控器
机载计算机
传感器&外设
GPS&罗盘&开关
距离传感器
光流
数传
飞行状态
首先,一看到专业性强的英文术语,我就已经感到了头晕,那么先进行初步的了解:
PX4、Pixhawk、APM、ArduPilot、Dronecode
ArduPilot与Pixhawk什么关系? - 知乎 (zhihu.com)
Dronekit又是什么?
--Dronekit是用于控制无人机的Python库。
Pixhawk无人机扩展教程(3)---树莓派安装Dronekit及读取飞控数据_树莓派 python dronekit-CSDN博客
ROS是什么?
--ROS(Robot Operating System) 适用于机器人的开源的元操作系统
cn/ROS/Introduction - ROS Wiki
ROS系统--初识ROS - 知乎 (zhihu.com)
具体的ROS系统 环境安装、学习记录会更新于下一篇博客。
在B站大学找到了一门很好的课程。根据up主的讲解,我进行整理。(零件部分跳过,直接从飞控部分后开始)新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 1.无人机、PX4、ROS必知知识_哔哩哔哩_bilibili
1.控制系统
飞控
Pixhawk(开源飞控硬件 前身是APM -> 后升级为PX4->然后是Pixhawk)
地面站
QGroundControl (QGC) :
1.飞行地图显示无人机位置、飞行轨迹、飞机仪表等。
2.对飞控进行配置,支持PX4 Pro和ArduPilot
3.自主飞行的任务规划
4.显示视频流
去官网即可下载
下载和安装 | QGC Guide (4.3) (qgroundcontrol.com)
进入之后的画面,可以调整各种参数:

安装了一个Windows版本的,还可以尝试安装Linux-ubuntu版本.
遥控器
上位机
飞控是最底层的控制器,直接对无人机进行控制,其他的控制系统充当高级控制器,对飞控进行控制。
2.飞行模式
飞行模式分为手动或自主:手动模式需用户使用遥控器控制杆控制飞行;自主模式完全由飞控控制。
常见的三种模式:
>Stabilized:自稳模式,直接控制无人机姿态
>Altitude:定高模式,高度可以恒定
>Position:定点模式,可以进行悬停
可以使用遥控上的开关或地面站来切换飞行模式。
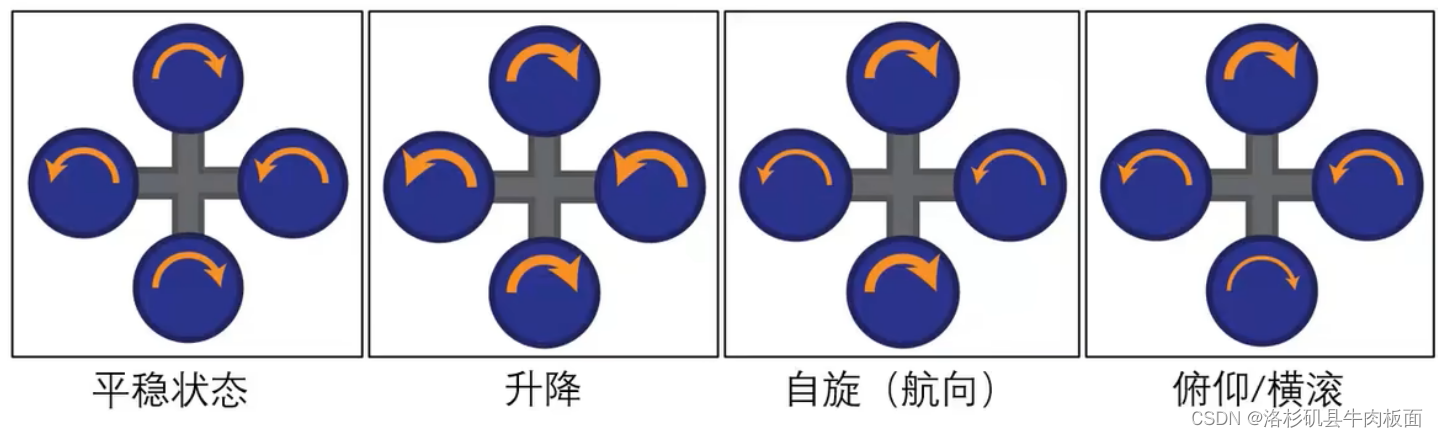
关于旋翼
对于四旋翼无人机,对角旋向一致,相邻旋向相反,反扭距相互抵消。
下图是四旋翼无人机 四个旋翼的一般编号:
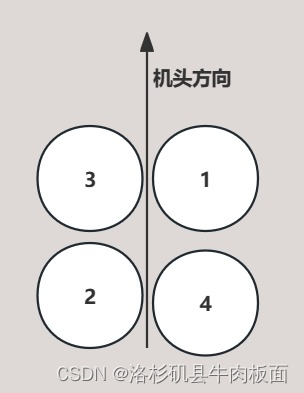
通过控制四个旋翼的转速,实现4个自由度运动:升降、偏航、俯仰、横滚
(图片来自up主视频)
关于坐标系
>地理坐标系(NED)
原点一般位于无人机的起飞点
N-北 E-东 D-down地
N轴水平指北,D轴指向地心,E轴水平指东。右手系
>运载体坐标系(FRD)
F-front R-right D-down地
x轴沿运载体纵轴,指向前方
y轴沿运载体横轴,指向右翼
z轴与x,y轴构成右手系,指向运载体底部
>姿态角
.横滚角 Roll -- y轴与水平面的夹角
.俯仰角 Pitch --x轴与水平面的夹角
.偏航角 Yaw --x轴在水平面的投影与N轴的夹角,顺时针为正
3.器件、设备等
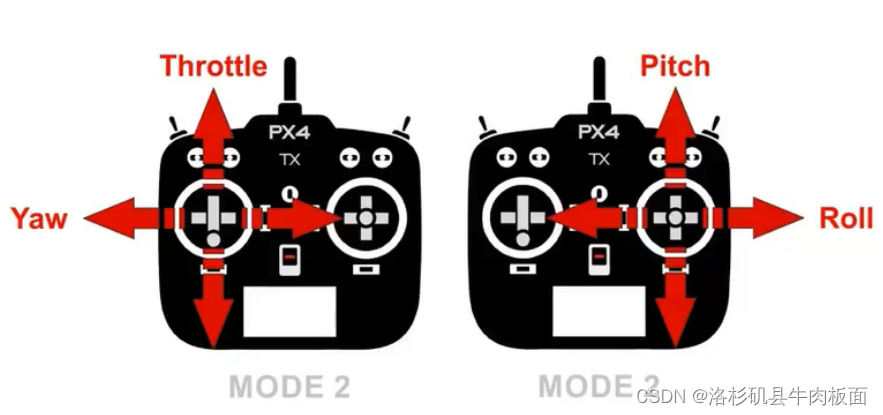
遥控器
横滚/俯仰 和 油门/偏航 的控制分别布置在摇杆上。飞行器最少需要4个通道
机载计算机
PX4可通过串行接线 或 WIFI 由独立的记载飞行计算机进行控制。 机载计算机通常使用MAVLinklingAPI,比如MAVSDK 或者 MAVROS 进行通信。
.Offboard模式,用于从地面站或机载计算机对PX4进行Offborad控制的飞行模式。
传感器&外设
基于PX4的系统使用传感器来确定飞行状态(自稳和启用自主控制所需)。
飞行器状态包括:位置/高度,航向,速度,空速,方向(姿态),电池电量等。
系统最低要求:陀螺仪、加速度计、磁力计(罗盘)、气压计。 需要GPS或其他定位系统来启用自动模式和辅助模式。
最小的传感器组合集成在Pixhawk飞控板上,附加/外部传感器可连接到控制器上。
GPS&罗盘&开关
>PX4支持全球导航卫星系统(GNSS)接收器 和 罗盘(磁力计),实时动态(RTK)GPS接收器。它将GPS系统扩展到厘米级精度。
>PX4 GPS集成了安全开关,不使用时 PX4是加锁状态的,必须在起飞之前进行解锁。
>通常GPS还自带罗盘,用于测定航向角。PX4 GPS还集成了LED灯和蜂鸣器。
距离传感器
距离传感器用于精准着陆、避障 和 地形跟随。
光流
光流传感器使用 下视相机 和 向下的距离传感器 进行速度估计。
PX4将光流传感器输出 与 来自其他定位源(例如GPS)的信息融合,以提供更准确的位置。
光流传感器适用于 没有GPS信号的室内。
数传
数传电台 可以在QGC地面站 与 运行PX4的机体之间提供无线MAVLink连接。
这使得飞机飞行中 调试参数、实时检查遥测信息、更改任务等 成为可能。
飞行状态
PX4提供基于机载视觉(LED) 和 声音(蜂鸣器)的高级飞行状态和飞行准备提示。例如,这些提示表明飞行器是否正确校准,是否有SD卡,是否有位置锁定,是否可以安全起飞,是否解锁等。
此外,PX4在地面站的起飞前检查中提供更详细的关于起飞准备的信息。