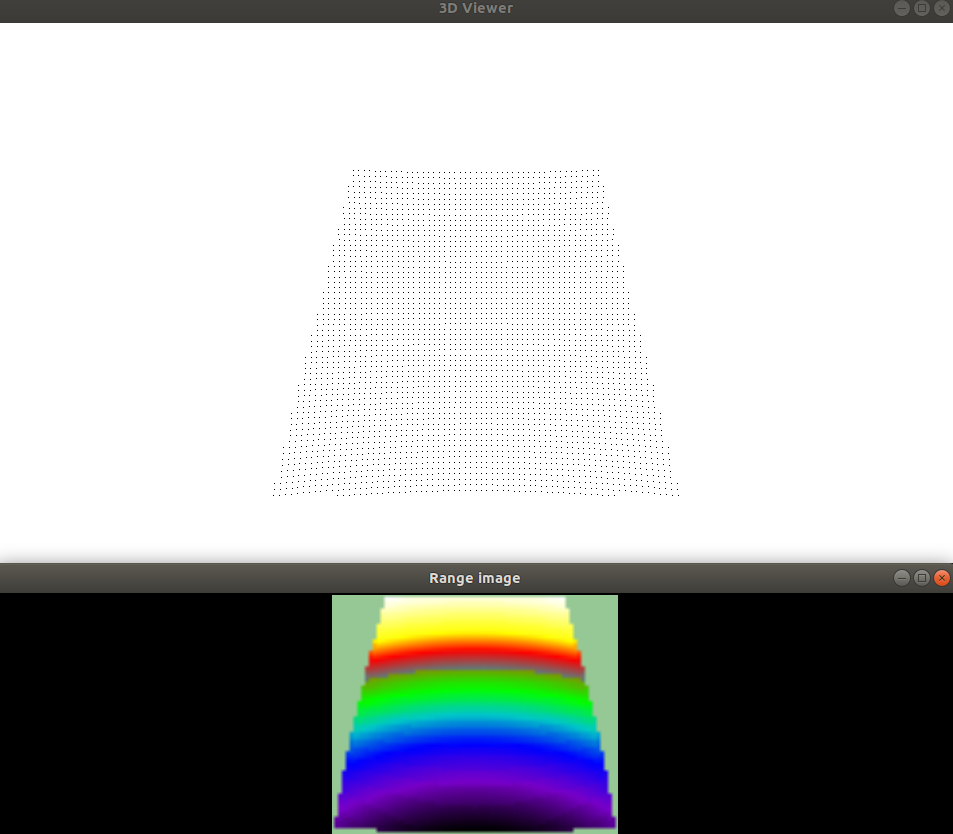
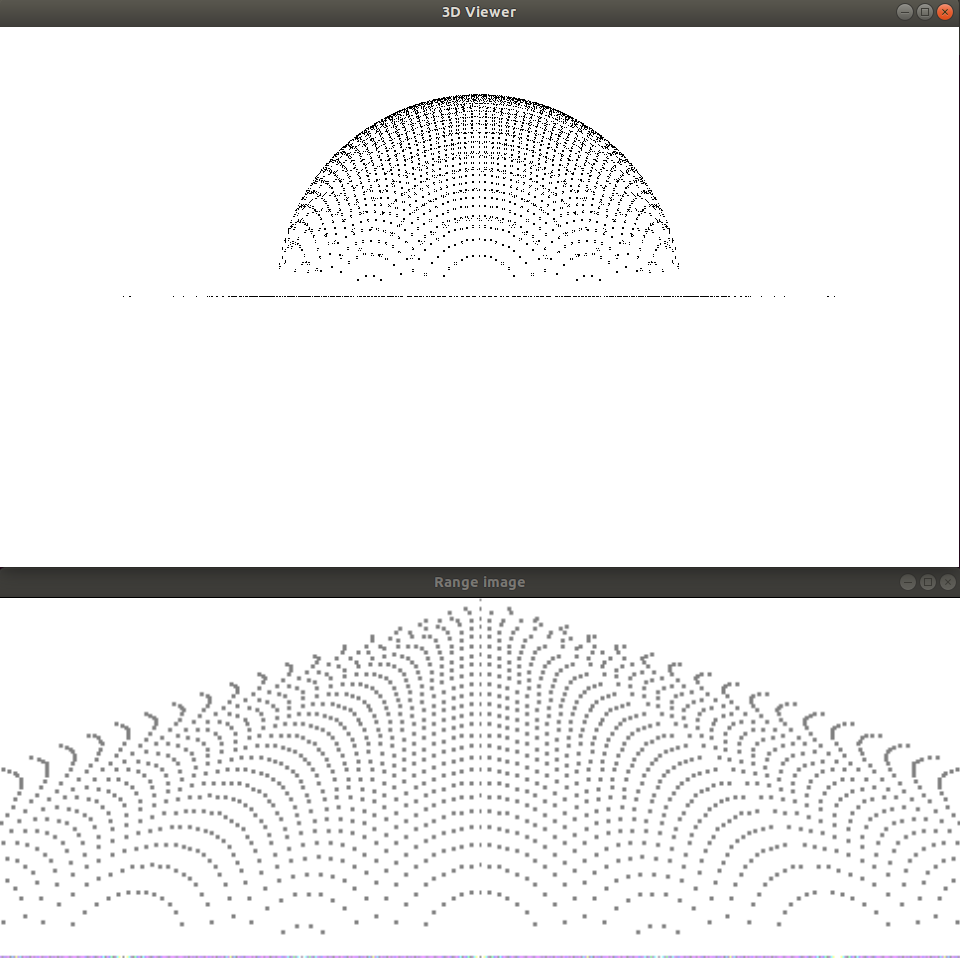
(十六)点云距离图可视化
以下代码实现点云及其对应距离图的可视化。
数据样例:sphere100.pcd
range_image_visualization.cpp
#include <iostream>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
typedef pcl::PointXYZ PointType;
// --------------------
// -----Parameters-----
// --------------------
float angular_resolution_x = 0.5f,
angular_resolution_y = angular_resolution_x;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::LASER_FRAME;
bool live_update = false;
// --------------
// -----Help-----
// --------------
void printUsage (const char* progName)
{
std::cout << "\n\nUsage: "<<progName<<" [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-rx <float> angular resolution in degrees (default "<<angular_resolution_x<<")\n"
<< "-ry <float> angular resolution in degrees (default "<<angular_resolution_y<<")\n"
<< "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\n"
<< "-l live update - update the range image according to the selected view in the 3D viewer.\n"
<< "-h this help\n"
<< "\n\n";
}
void setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose)
{
Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f(0, 0, 0);
Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f(0, 0, 1) + pos_vector;
Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f(0, -1, 0);
viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2],
look_at_vector[0], look_at_vector[1], look_at_vector[2],
up_vector[0], up_vector[1], up_vector[2]);
}
// --------------
// -----Main-----
// --------------
int main (int argc, char** argv)
{
// --------------------------------------
// -----Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
{
printUsage (argv[0]);
return 0;
}
if (pcl::console::find_argument (argc, argv, "-l") >= 0)
{
live_update = true;
std::cout << "Live update is on.\n";
}
if (pcl::console::parse (argc, argv, "-rx", angular_resolution_x) >= 0)
std::cout << "Setting angular resolution in x-direction to "<<angular_resolution_x<<"deg.\n";
if (pcl::console::parse (argc, argv, "-ry", angular_resolution_y) >= 0)
std::cout << "Setting angular resolution in y-direction to "<<angular_resolution_y<<"deg.\n";
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
std::cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
angular_resolution_x = pcl::deg2rad (angular_resolution_x);
angular_resolution_y = pcl::deg2rad (angular_resolution_y);
// ------------------------------------------------------------------
// -----读取点云,如果没有提供则创建一个-----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1)
{
std::cout << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f (point_cloud.sensor_orientation_);
}
else
{
std::cout << "\nNo *.pcd file given => Generating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f)
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.push_back (point);
}
}
point_cloud.width = point_cloud.size (); point_cloud.height = 1;
}
// -----------------------------------------------
// -----创建一个距离图像-----
// -----------------------------------------------
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
pcl::RangeImage::Ptr range_image_ptr(new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution_x, angular_resolution_y,
pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
// --------------------------------------------
// -----创建3D查看器对象并添加点云-----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (1, 1, 1); // 背景颜色设置为白色
pcl::visualization::PointCloudColorHandlerCustom/<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 0, 0, 0); // 黑色
viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
// viewer.addCoordinateSystem (1.0f, "global"); // 用于添加坐标系
PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud"); // 可视化原始点云
viewer.initCameraParameters ();
setViewerPose(viewer, range_image.getTransformationToWorldSystem ()); // 将查看器中的查看位置设置为范围图像中的传感器位置
// --------------------------
// -----显示距离图像-----
// --------------------------
pcl::visualization::RangeImageVisualizer range_image_widget ("Range image");
range_image_widget.showRangeImage (range_image);
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped ())
{
// spinOnce()处理RangeImageVisualizer和viewer的当前事件
range_image_widget.spinOnce ();
viewer.spinOnce ();
pcl_sleep (0.01);
if (live_update) // 根据3D查看器中的当前透视图更新距离图像:
{
scene_sensor_pose = viewer.getViewerPose();
range_image.createFromPointCloud (point_cloud, angular_resolution_x, angular_resolution_y,
pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, pcl::RangeImage::LASER_FRAME, noise_level, min_range, border_size);
range_image_widget.showRangeImage (range_image);
}
}
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(range_image_visualization)
find_package(PCL 1.3 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (range_image_visualization range_image_visualization.cpp)
target_link_libraries (range_image_visualization ${PCL_LIBRARIES})
编译并运行
$ ./range_image_visualization -c 0
$ ./range_image_visualization sphere100.pcd
也可以使用参数-l根据3D查看器中的当前视图更新范围图像:
./range_image_visualization sphere100.pcd -l
官方文档