位置跟踪
位置跟踪的主要作用有以下几点:
- 为单圈绝对值编码器设置一个虚拟多圈
- 扩展位置区域
- 使用齿轮箱时编码器可以重复负载位置
当位置跟踪功能使能后,那么实际位置值在驱动断电时会保存在驱动的掉电存储区中。当驱动器重新上电后,驱动可以正常读取保存的位置数据。
虚拟多圈编码器
对于位置跟踪功能激活(p29243=1)的单圈绝对值编码器,p29244可用于设置一个虚拟多圈分辨率。该功能可以实现使用单圈编码器时输出一个多圈编码器值。r2521中的最大实际位置值为

位。
- 当位置跟踪功能禁用时(p29243=0):编码器实际位置值范围=实际单圈分辨率
- 当位置跟踪功能激活时(p29243=1):编码器实际位置范围=实际单圈分辨率×虚拟多圈分辨率(p29244)
公差窗口
公差窗口的预设值为编码器分辨率的四分之一,驱动上电后,会测量实际位置与保存位置之间的差值。基于该差值,会执行以下操作:
- 差值在公差窗口:
根据当前编码器的实际位置值重复位置
- 差值超出公差窗口:
输出故障信息F7449(针对EPOS模式)
注意:驱动断电时,轴移动导致多圈位置信息丢失
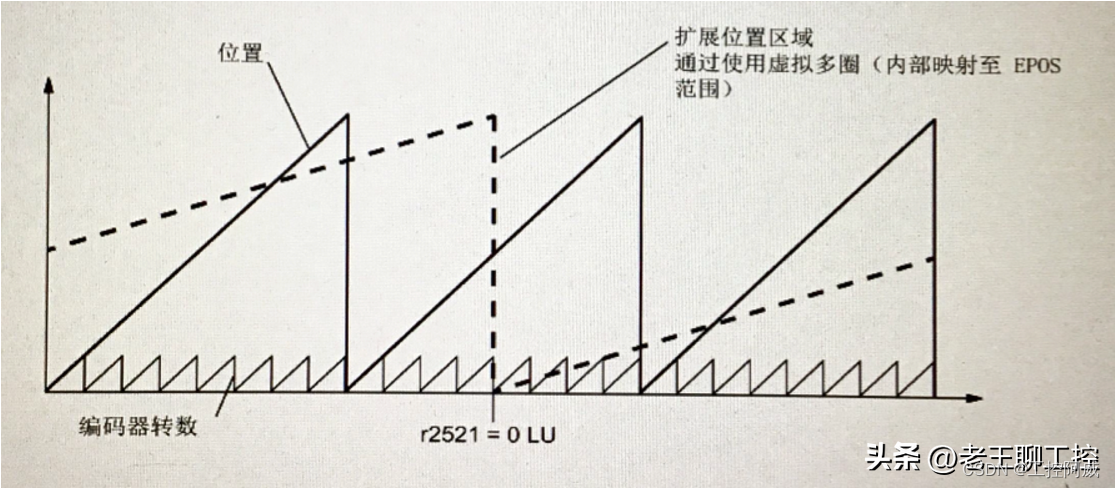
位置区域扩展
当位置跟踪功能激活时,位置区域可以被扩展,例如,
下图中所选择的编码器可以输出八圈编码器旋转
- 若位置跟踪功能禁用(p29243=0),编码器可以记录+/-4圈的位置信息
- 若位置跟踪功能激活(p29243=1),并设置虚拟多圈p29244=24,传动比为p29248/p29249=1,编码器可以记录+/-12圈
机械齿轮配置
若在电机和负载之间使用了机械齿轮,并需要通过该绝对值编码器进行位置跟踪,在每次编码器计数溢出后,编码器和电机负载的零位便会发生偏移,偏移大小取决于传动比。(若多圈分辨率与模数范围p29246之比不是整数,则报警输出故障F7442)
为确保多圈分辨率和模态轴的比值为整数,遵循以下公式。比值v的计算方法如下:
- 不带位置跟踪功能的编码器(p29430=0):
-对于多圈编码器:

-对于单圈编码器

- 有位置跟踪功能的编码器(p29243=1)

示例

- 传动比=p29248:p29249=1:3
- 绝对值编码器可输出八圈编码器旋转
- 位置跟踪功能禁用(p29243=0)
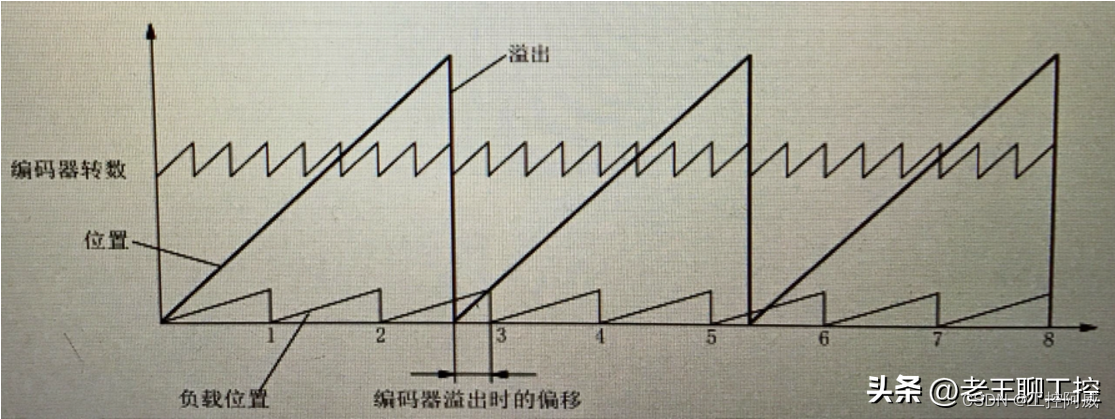
在这种情况下,编码器计数器每溢出一圈,负载便偏移1/3转,编码器溢出三圈后,电机和负载零位再次重叠。编码器溢出一圈后便不能再精确重复负载位置。
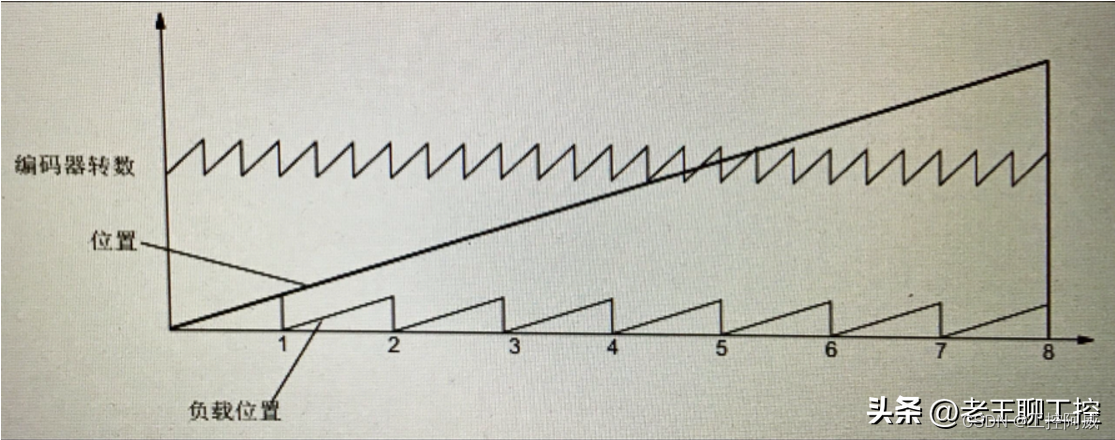
此时,若激活位置跟踪功能(p29243=1),并设置虚拟多圈p29244=24,传动比会同时换算成编码器位置实际值。
重要参数一览
- p29243 位置跟踪激活
- p29244 绝对值编码器虚拟旋转分辨率
- p29248 机械齿轮:分子
- p29249 机械齿轮:分母
- r2521[0] LR 位置实际值
END