文章目录
- 前言
- 一、关键函数
- 二、完整代码
- 效果
前言
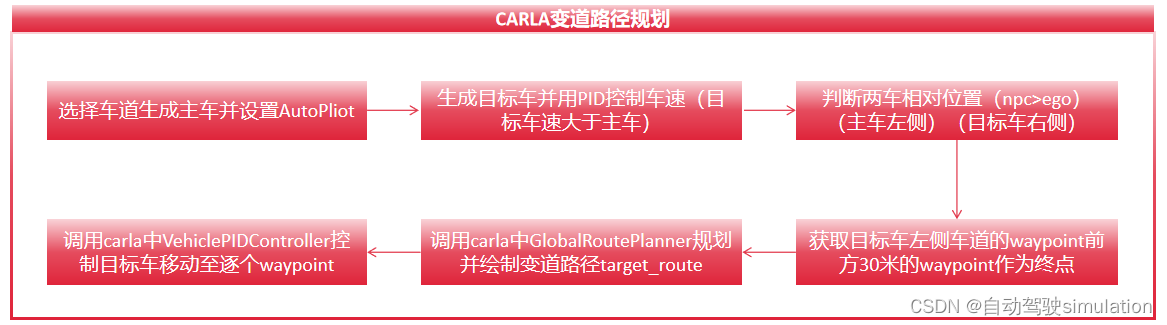
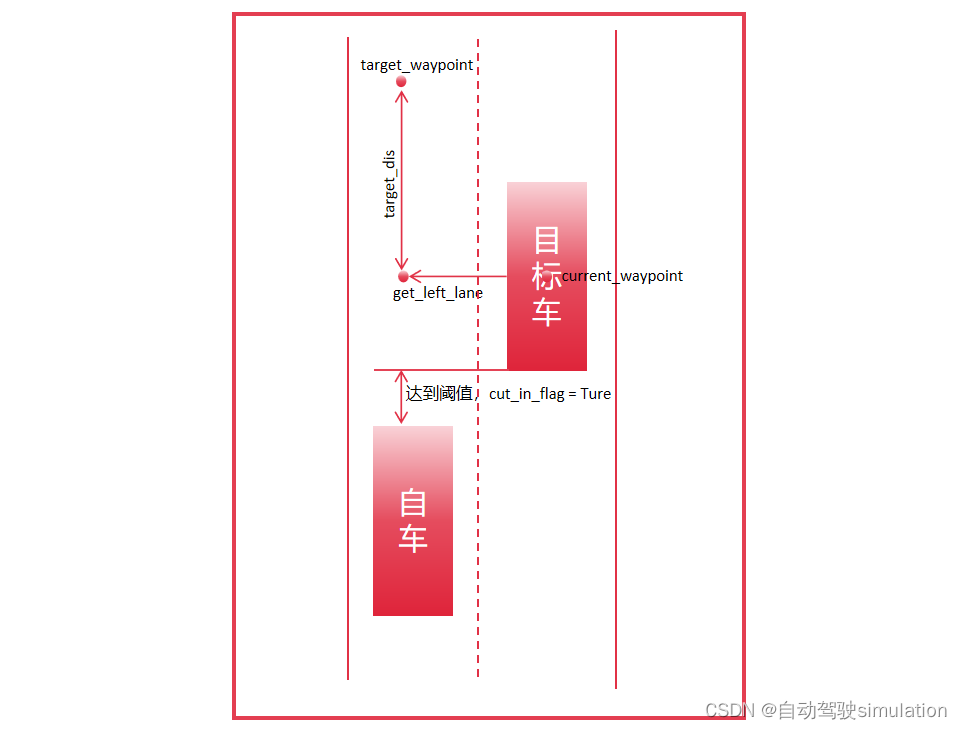
本文介绍一种在carla中比较简单的变道路径规划方法,主要核心是调用carla的GlobalRoutePlanner模块和PID控制模块实现变道,大体的框架如下图所示。

一、关键函数
1、get_spawn_point(),该函数根据指定road和lane获得waypoint(这里之所以这么用是为了选择一条比较长的直路)。具体用法可以参考上篇文章:Carla自动驾驶仿真八:两种查找CARLA地图坐标点的方法
def get_spawn_point(self,target_road_id,target_lane_id):
#每隔5m生成1个waypoint
waypoints = self.map.generate_waypoints(5.0)
# 遍历路点
for waypoint in waypoints:
if waypoint.road_id == target_road_id:
lane_id = waypoint.lane_id
# 检查是否已经找到了特定车道ID的路点
if lane_id == target_lane_id:
location = waypoint.transform.location
location.z = 1
ego_spawn_point = carla.Transform(location, waypoint.transform.rotation)
break
return ego_spawn_point
2、should_cut_in(),用于主车和目标车的相对距离判断,当目标车超越自车一定距离时,开始给cut_in_flag置Ture,并在下一步骤规划变道路径和执行变道操作。
def should_cut_in(self,npc_vehicle, ego_vehicle, dis_to_cut=5):
location1 = npc_vehicle.get_transform().location
location2 = ego_vehicle.get_transform().location
rel_x = location1.x - location2.x
rel_y = location1.y - location2.y
distance = math.sqrt(rel_x * rel_x + rel_y * rel_y)
print("relative dis",distance)
#rel_x 大于等于0,说明目标车在前方
if rel_x >= 0:
distance = distance
else:
distance = -distance
if distance >= dis_to_cut:
print("The conditions for changing lanes are met.")
cut_in_flag = True
else:
cut_in_flag = False
return cut_in_flag
3、cal_target_route(),函数中调用了Carla的GlobalRoutePlanner模块,能根据起点和终点自动生成车辆行驶的路径(重点),我这里的变道起点是两车相对距离达到(阈值)时目标车的当前位置,而终点就是左侧车道前方target_dis米。将起点和终点代入到route = grp.trace_route(current_location, target_location)就能获取到规划路径route。
def cal_target_route(self,vehicle=None,lanechange="left",target_dis=20):
#实例化道路规划模块
grp = GlobalRoutePlanner(self.map, 2)
#获取npc车辆当前所在的waypoint
current_location = vehicle.get_transform().location
current_waypoint = self.map.get_waypoint(current_location)
#选择变道方向
if "left" in lanechange:
target_org_waypoint = current_waypoint.get_left_lane()
elif "right" in lanechange:
target_org_waypoint = current_waypoint.get_right_lane()
#获取终点的位置
target_location = target_org_waypoint.next(target_dis)[0].transform.location
#根据起点和重点生成规划路径
route = grp.trace_route(current_location, target_location)
return route
4、speed_con_by_pid(),通过PID控制车辆的达到目标速度,pid是通过实例化Carla的PIDLongitudinalController实现。由于pid.run_step()只返回油门的控制,需要增加刹车的逻辑。
control_signal = pid.run_step(target_speed=target_speed, debug=False)
throttle = max(min(control_signal, 1.0), 0.0) # 确保油门值在0到1之间
brake = 0.0 # 根据需要设置刹车值
if control_signal < 0:
throttle = 0.0
brake = abs(control_signal) # 假设控制器输出的负值可以用来刹车
vehilce.apply_control(carla.VehicleControl(throttle=throttle, brake=brake))
5、PID = VehiclePIDController()是carla的pid横纵向控制模块,通过设置目标速度和目标终点来实现轨迹控制control = PID.run_step(target_speed, target_waypoint),PID参数我随便调了一组,有兴趣的可以深入调一下。
二、完整代码
import carla
import time
import math
import sys
#修改成自己的carla路径
sys.path.append(r'D:\CARLA_0.9.14\WindowsNoEditor\PythonAPI\carla')
from agents.navigation.global_route_planner import GlobalRoutePlanner
from agents.navigation.controller import VehiclePIDController,PIDLongitudinalController
from agents.tools.misc import draw_waypoints, distance_vehicle, vector, is_within_distance, get_speed
class CarlaWorld:
def __init__(self):
self.client = carla.Client('localhost', 2000)
self.world = self.client.load_world('Town06')
# self.world = self.client.get_world()
self.map = self.world.get_map()
# 开启同步模式
settings = self.world.get_settings()
settings.synchronous_mode = True
settings.fixed_delta_seconds = 0.05
def spawm_ego_by_point(self,ego_spawn_point):
vehicle_bp = self.world.get_blueprint_library().filter('vehicle.tesla.*')[0]
ego_vehicle = self.world.try_spawn_actor(vehicle_bp,ego_spawn_point)
return ego_vehicle
def spawn_npc_by_offset(self,ego_spawn_point,offset):
vehicle_bp = self.world.get_blueprint_library().filter('vehicle.tesla.*')[0]
# 计算新的生成点
rotation = ego_spawn_point.rotation
location = ego_spawn_point.location
location.x += offset.x
location.y += offset.y
location.z += offset.z
npc_transform = carla.Transform(location, rotation)
npc_vehicle = self.world.spawn_actor(vehicle_bp, npc_transform)
return npc_vehicle
def get_spawn_point(self,target_road_id,target_lane_id):
#每隔5m生成1个waypoint
waypoints = self.map.generate_waypoints(5.0)
# 遍历路点
for waypoint in waypoints:
if waypoint.road_id == target_road_id:
lane_id = waypoint.lane_id
# 检查是否已经找到了特定车道ID的路点
if lane_id == target_lane_id:
location = waypoint.transform.location
location.z = 1
ego_spawn_point = carla.Transform(location, waypoint.transform.rotation)
break
return ego_spawn_point
def cal_target_route(self,vehicle=None,lanechange="left",target_dis=20):
#实例化道路规划模块
grp = GlobalRoutePlanner(self.map, 2)
#获取npc车辆当前所在的waypoint
current_location = vehicle.get_transform().location
current_waypoint = self.map.get_waypoint(current_location)
#选择变道方向
if "left" in lanechange:
target_org_waypoint = current_waypoint.get_left_lane()
elif "right" in lanechange:
target_org_waypoint = current_waypoint.get_right_lane()
#获取终点的位置
target_location = target_org_waypoint.next(target_dis)[0].transform.location
#根据起点和重点生成规划路径
route = grp.trace_route(current_location, target_location)
return route
def draw_target_line(self,waypoints):
# 获取世界和调试助手
debug = self.world.debug
# 设置绘制参数
life_time = 60.0 # 点和线将持续显示的时间(秒)
color = carla.Color(255, 0, 0)
thickness = 0.3 # 线的厚度
for i in range(len(waypoints) - 1):
debug.draw_line(waypoints[i][0].transform.location + carla.Location(z=0.5),
waypoints[i + 1][0].transform.location + carla.Location(z=0.5),
thickness=thickness,
color=color,
life_time=life_time)
def draw_current_point(self,current_point):
self.world.debug.draw_point(current_point,size=0.1, color=carla.Color(b=255), life_time=60)
def speed_con_by_pid(self,vehilce=None,pid=None,target_speed=30):
control_signal = pid.run_step(target_speed=target_speed, debug=False)
throttle = max(min(control_signal, 1.0), 0.0) # 确保油门值在0到1之间
brake = 0.0 # 根据需要设置刹车值
if control_signal < 0:
throttle = 0.0
brake = abs(control_signal) # 假设控制器输出的负值可以用来刹车
vehilce.apply_control(carla.VehicleControl(throttle=throttle, brake=brake))
def set_spectator(self,vehicle):
self.world.get_spectator().set_transform(
carla.Transform(vehicle.get_transform().location +
carla.Location(z=50), carla.Rotation(pitch=-90))
)
def should_cut_in(self,npc_vehicle, ego_vehicle, dis_to_cut=5):
location1 = npc_vehicle.get_transform().location
location2 = ego_vehicle.get_transform().location
rel_x = location1.x - location2.x
rel_y = location1.y - location2.y
distance = math.sqrt(rel_x * rel_x + rel_y * rel_y)
print("relative dis",distance)
if rel_x >= 0:
distance = distance
else:
distance = -distance
if distance >= dis_to_cut:
print("The conditions for changing lanes are met.")
cut_in_flag = True
else:
cut_in_flag = False
return cut_in_flag
if __name__ == '__main__':
try:
CARLA = CarlaWorld()
#根据road_id和lane_id选择出生点
start_point = CARLA.get_spawn_point(target_road_id=40, target_lane_id=-5)
#生成自车
ego_vehicle = CARLA.spawm_ego_by_point(start_point)
#设置初始的观察者视角
CARLA.set_spectator(ego_vehicle)
#相对ego生成目标车
relative_ego = carla.Location(x=-10, y=3.75, z=0)
npc_vehicle = CARLA.spawn_npc_by_offset(start_point, relative_ego)
# 设置ego自动巡航
ego_vehicle.set_autopilot(True)
#设置目标车初始速度的纵向控制PID
initspd_pid = PIDLongitudinalController(npc_vehicle, K_P=1.0, K_I=0.1, K_D=0.05)
#设置目标车的cut_in的横纵向控制PID
args_lateral_dict = {'K_P': 0.8, 'K_D': 0.8, 'K_I': 0.70, 'dt': 1.0 / 10.0}
args_long_dict = {'K_P': 1, 'K_D': 0.0, 'K_I': 0.75, 'dt': 1.0 / 10.0}
PID = VehiclePIDController(npc_vehicle, args_lateral_dict, args_long_dict)
waypoints = None
waypoint_index = 0
need_cal_route = True
cut_in_flag = False
arrive_target_point = False
target_distance_threshold = 2.0 # 切换waypoint的距离
start_sim_time = time.time()
while not arrive_target_point:
CARLA.world.tick()
# 更新观察者的视野
CARLA.set_spectator(ego_vehicle)
#计算目标车的初始速度
ego_speed = (ego_vehicle.get_velocity().x * 3.6) #km/h
target_speed = ego_speed + 8 #目标车的目标速度
#是否满足cut_in条件
if cut_in_flag:
if need_cal_route:
#生成车侧车道前方30m的waypoint
waypoints = CARLA.cal_target_route(npc_vehicle,lanechange= "left",target_dis=30)
CARLA.draw_target_line(waypoints)
need_cal_route = False
# 如果已经计算了路线
if waypoints is not None and waypoint_index < len(waypoints):
# 获取当前目标路点
target_waypoint = waypoints[waypoint_index][0]
# 获取车辆当前位置
transform = npc_vehicle.get_transform()
#绘制当前运行的点
CARLA.draw_current_point(transform.location)
# 计算车辆与当前目标路点的距离
distance_to_waypoint = distance_vehicle(target_waypoint, transform)
# 如果车辆距离当前路点的距离小于阈值,则更新到下一个路点
if distance_to_waypoint < target_distance_threshold:
waypoint_index += 1 # 移动到下一个路点
if waypoint_index >= len(waypoints):
arrive_target_point = True
print("npc_vehicle had arrive target point.")
break # 如果没有更多的路点,退出循环
else:
# 计算控制命令
control = PID.run_step(target_speed, target_waypoint)
# 应用控制命令
npc_vehicle.apply_control(control)
else:
#设置NPC的初始速度
CARLA.speed_con_by_pid(npc_vehicle,initspd_pid,target_speed)
#判断是否可以cut in
cut_in_flag = CARLA.should_cut_in(npc_vehicle,ego_vehicle,dis_to_cut=8)
# 判断是否达到模拟时长
if time.time() - start_sim_time > 60:
print("Simulation ended due to time limit.")
break
#到达目的地停车
npc_vehicle.apply_control(carla.VehicleControl(throttle=0, steer=0, brake=-0.5))
print("Control the target car to brake.")
time.sleep(10)
except Exception as e:
print(f"An error occurred: {e}")
finally:
# 清理资源
print("Cleaning up the simulation...")
if ego_vehicle is not None:
ego_vehicle.destroy()
if npc_vehicle is not None:
npc_vehicle.destroy()
settings = CARLA.world.get_settings()
settings.synchronous_mode = False # 禁用同步模式
settings.fixed_delta_seconds = None
效果
下述是变道规划简单的实现,轨迹跟踪效果比较一般,PID没有仔细调,紫色是车辆运行的点迹。

公众号:自动驾驶simulation