题目
Zero-Shot Visual Recognition using Semantics-Preserving Adversarial Embedding Networks
摘要
基于visual-semantic embedding,的ZSL方法存在信息损失(semantic loss),的问题,在训练过程中,如果某些语义信息对分类的区分性不大,则会被丢弃,但是这些信息往往对识别unseen class很重要,
为了避免semantic loss,我们提出Semantic-Preserving Adversial Embedding Network(SP-AEN), 通过引入visual-to-semantic space embedder,将语义空间分解成两个子空间,分别进行分类和重构任务,(可以认为两个互相冲突的任务),通过对这两个子空间进行对抗学习,SP-AEN,可以将语义信息从重构子空间迁移到判别子空间。从而改进对unseen class的识别效果,与先前的方法相比,SP-AEN不仅可以提升识别效果,还能生成图像,验证了语义信息保留的有效性。
Note:该方法仍然是visual-semantic embedding方法。
Motivation
基于visual semantic embedding,的ZSL方法的语义迁移能力,受限于semantic loss问题,训练阶段,丢弃低方差信息,(判别信息较少)对分类有利,但是由于seen class 和unseen class 之间的语义差异,这些信息在测试时,对于unseen class ,往往具有较强的判别性,这将导致对不可见类别的语义信息的损失。主要原因是虽然class embedding具有丰富的语义信息,但其只是语义空间中的一个点,图像映射(将视觉空间映射到语义空间)就会坍塌这一点。
可以利用重构(由某个图像得到的语义向量能够映射回这个图像)来保留语义信息,那么其中任意两个语义向量,(由两个图像映射得到)需要保留足够的语义信息才能将其分离开,(这样就能避免了映射坍塌到一点),否则不能重构,然而分类和重构本质上是两个相互冲突的任务:重构希望能够保留图像的细节信息,而分类则抑制无关信息,下面的例子具体说明:
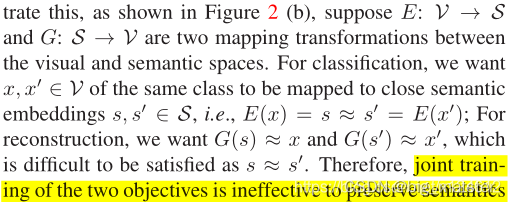
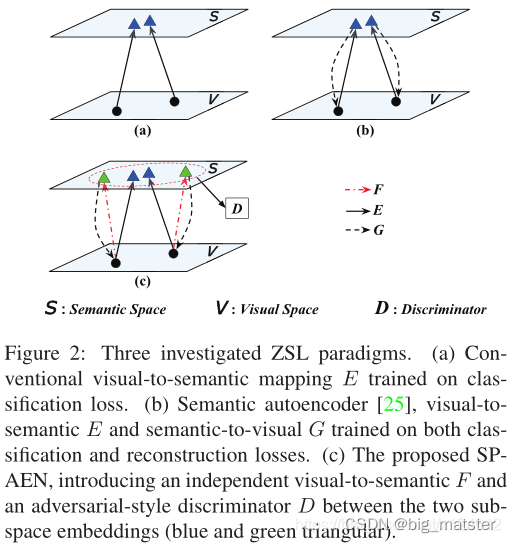
为了解决这个冲突,提出新的Visual semantic embedding框架,SP-AEN。如果2,引入了一个新的映射, Visual-to-semantc space embedder.
F
:
V
→
S
F: V \rightarrow S
F:V→S和判别器
D
D
D来区分
F
(
x
)
F(x)
F(x),
E
(
x
)
E(x)
E(x)
引入
F
,
D
F,D
F,D来帮助
E
E
E保留语义信息。
语义迁移
基于映射
E
E
E发生了semantic loss,可以利用
F
F
F 从其他类别
E
(
x
)
E(x)
E(x)
中弥补信息,而且判别器
D
D
D,会使得
F
(
x
)
F(x)
F(x)和
E
(
x
)
E(x)
E(x)趋于相同分布,从而从
F
(
x
)
F(x)
F(x)迁移语义到
E
(
x
)
E(x)
E(x)中,例如,
E
(
b
i
r
d
)
E(bird)
E(bird)丢失了spotty属性信息,可以通过
E
(
l
e
a
p
a
r
d
)
E(leapard)
E(leapard)补偿,因为spotty是leapard类别中具有强判别能力的属性,会被保留。
分离和分类重构任务
重构由
F
,
G
F,G
F,G来实现,分类由
E
E
E实现,
这样,约束
G
(
E
(
x
)
)
≈
x
,
G
(
E
(
x
’
)
)
≈
x
’
G(E(x)) ≈ x , G(E(x’)) ≈ x’
G(E(x))≈x,G(E(x’))≈x’ 就被
G
(
F
(
x
)
)
≈
x
,
G
(
F
(
x
’
)
)
≈
x
’
G(F(x)) ≈ x , G(F(x’)) ≈ x’
G(F(x))≈x,G(F(x’))≈x’,替代,
F
(
x
)
、
F
(
x
‘
)
F(x)、F(x‘)
F(x)、F(x‘)不需要很接近,(
x
、
x
’
x、x’
x、x’,来两个相似的类别,分类任务要求
E
(
x
)
,
E
(
x
‘
)
E(x),E(x‘)
E(x),E(x‘)接近,导致重构效果不好),从而解决分类和重构的冲突,此外
G
(
F
(
x
)
)
G(F(x))
G(F(x))还能用来生成图像,验证了语义信息被更好的保留
Method
Classfication
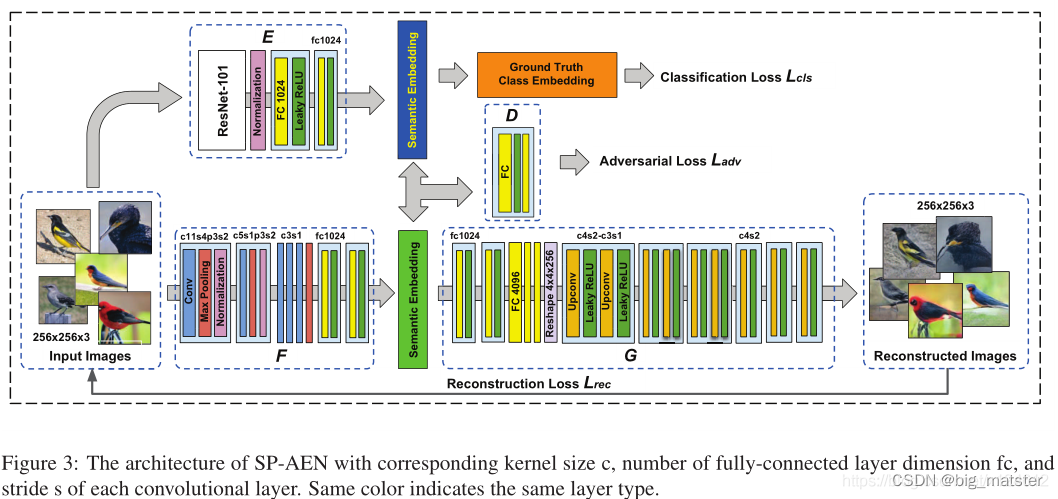
利用基于最大间隔的排序损失来实现分类:

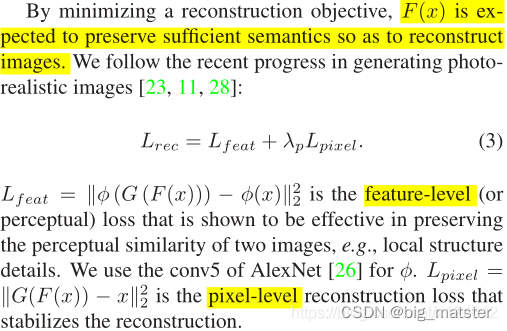
Reconstruction
利用
256
×
256
×
3
256 \times 256 \times 3
256×256×3的原始RGB图像,进行图像重构,因为使用CNN网络提取的图像特征本质上也是语义空间,也会存在语义信息损失.
Adversial
F
(
x
)
F(x)
F(x)具有丰富的语义信息,我们希望可以将
F
(
x
)
F(x)
F(x)的语义迁移到
E
(
x
’
)
E(x’)
E(x’)中,所以,利用判别器
D
D
D,将
F
(
x
)
F(x)
F(x)视为真,
E
(
x
’
)
E(x’)
E(x’)视为假,

Note:Note:最小化
L
a
d
v
Ladv
Ladv容易引起
m
o
d
e
c
o
l
l
a
p
s
e
mode collapse
modecollapse问题。当
x
、
x
’
x、x’
x、x’是相似的图像(通常是同一类别),损失函数
L
a
d
v
Ladv
Ladv会被
∥
F
(
x
)
−
E
(
x
’
)
∥
≈
0
∥F(x)− E(x’)∥ ≈ 0
∥F(x)−E(x’)∥≈0主导,这将导致不能在类别之间迁移语义信息。这里,利用
W
G
A
N
WGAN
WGAN,有助于梯度限制和训练稳定性。
Full objective


可以将
F
F
F看作encoder,G看作
D
e
c
o
d
e
r
Decoder
Decoder,那么
F
(
x
)
F(x)
F(x)可以看作
b
o
t
t
l
e
n
e
c
k
l
a
y
e
r
bottleneck layer
bottlenecklayer,要其能够匹配
E
(
x
)
E(x)
E(x)的分布,这样SP-AEN是由监督的对抗式自编码器,那么SP-AEN能够被修改以适应别的ZSL框架,比如半监督的
S
P
−
A
E
N
SP-AEN
SP−AEN(在
F
(
x
)
F(x)
F(x)上施加额外的对抗损失函数,来匹配一个先验分布)。
- Visual-to-semantci E E E
- semantic-to-Visual G G G
- an independent visual-to-semantic F F F
- an adversarial-style discriminator D D D
- the semantic embedding E ( x ) E(x) E(x)
技术操作
- visual-semantic embedding
- semantic loss
- Adversarial Embedding Network
- visual-to-semantic space embedder
- Classifcaiion 和Reconstruction.
- Adversial
- 判别器D
- 语义迁移
- 视觉空间和语义空间
- 最大间隔排序损失
- 对抗自动编码器
- photo-realistic reconstruction
- Semantic autoencoder
- all the class embeddings
- a flexible plug-and-play
- end-to-end fine-tune fashion
- the ranking based classification loss
- GAN
- a large-margin based ranking loss function
- MSRA random initializer
- grid search
- harmonic mean
创新
为了语义损失问题,我们提出来一个新颖的零样本方法嵌入架构 S P − A E N SP-AEN SP−AEN 去保存语义信息。
- 对抗学习来实现语义迁移。: the two independent semantic embeding.
未来工作
- 开发模型一般找一个基准模型,借鉴原有名词:eg:半监督、对抗、监督等名词进行修改与调试模型。
- incorporating(合并)generative models into SP-AEN, so as to hallucinating photo realistic images for unseen or even synthesized classes
- developing new ZSL frameworks such as semi-supervised SP-AEN by imposing a prior semantic space
后续
- 开发一个新的框架去学习与掌握
开发模型思路
- 半监督
- 生成式模型
- 对抗训练
- 元学习框架
后续继续补充。 - 后续在继续将各种model全部都将其搞完整,慢慢的将其全部都搞定都行啦的理由与打算。后者在将相关技术大致了解一波。本篇论文算结束。
问题
- 如何保留语义信息
- 分类—重构——对抗——最终目标
- domain adaptation
- Domain Shift and Hubness.
- r data augmentation