直方图原理就不说了,大家自行百度
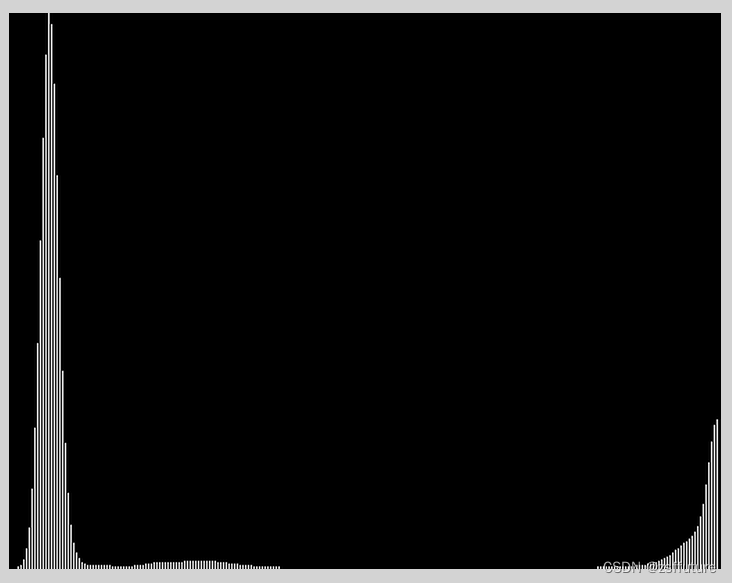
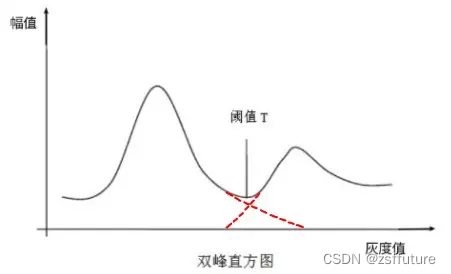
直方图可以帮助分析图像中的灰度变化,进而帮助确定最优二值化的灰度阈值(threshold level)。如果物体与背景的灰度值对比明显,此时灰度直方图就会包含双峰(bimodal histogram),即直方图中一般会有两个峰值,分别为图像的前景和背景。
前景使得某个灰度区间的灰度值的数量急剧增加,就会产生一个峰值,同理背景会使另一个灰度区间的灰度值的数量急剧增加,就产生另外一个峰值,两峰间的谷底对应于物体边缘附近相对较少数目的像素点。
这两个峰值之间的最小值一般就是最优二值化的分界点,通过这个分界点可以把前景和背景很好地分割开来。
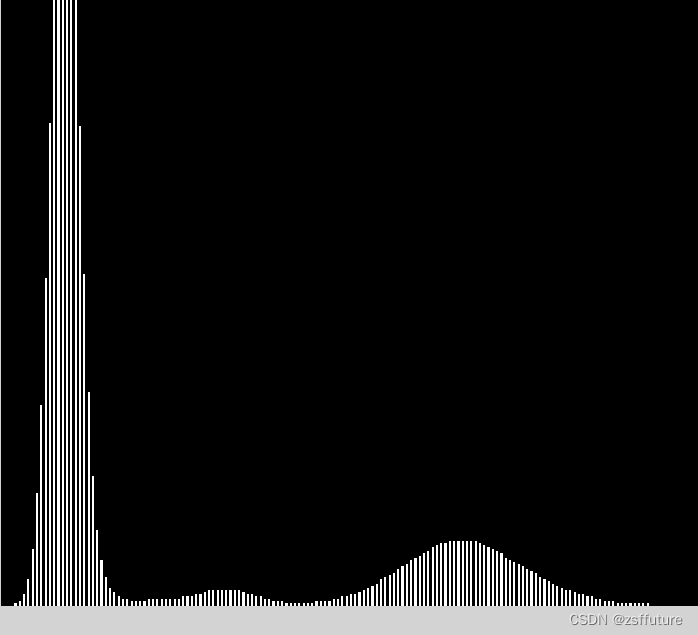
有时这两个峰值会有部分重叠,即左侧峰值的下降部分和右侧峰值的上升部分存在叠加。通常可以把自然界的信号看做高斯信号,即一个峰值对应一个高斯信号,当直方图中的两个高斯信号在某个灰度区域叠加的时候,其叠加区就形成了一个圆滑的谷底,就很难找到一个确切的位置(最优二值化的灰度值)把这两个峰值分开。
float calculateThreshold(cv::Mat& img)
{
cv::Mat temp = img.clone();
// 计算直方图
cv::Mat hist;
int histSize = 256; // 直方图尺寸
float range[] = { 0, 256 }; // 像素值范围
const float* ranges[] = { range };
cv::calcHist(&img, 1, nullptr, cv::Mat(), hist, 1, &histSize, ranges);
/*for (int i = 0; i < 21; i++)
hist.at<float>(i, 0) = 0.0;*/
cv::normalize(hist, hist, 0, 1, cv::NORM_MINMAX);
//hist.convertTo(hist, CV_32S);
cv::GaussianBlur(hist, hist, cv::Size(0, 0),3,3);
//cv::blur(hist, hist, cv::Size(1, 9),cv::Point(-1,-1));
std::vector<float> peaks; // 存储峰值位置
std::vector<float> valleys; // 存储低谷位置
for (int i = 1; i < histSize - 1; i++) {
//std::cout << std::fixed << std::setprecision(4);
float currentValue = hist.at<float>(i);
float prevValue = hist.at<float>(i - 1);
float nextValue = hist.at<float>(i + 1);
/*if (currentValue < 0.001)
continue;*/
// 具体情况需要修改currentValue>0.005的阈值
if ((currentValue > prevValue && currentValue > nextValue && currentValue>0.005)) {
std::cout << prevValue << " " << currentValue << " " << nextValue << std::endl;
peaks.push_back(i); // 峰值
}
else if (currentValue < prevValue && currentValue < nextValue && currentValue>0.001) {
std::cout << prevValue << " " << currentValue << " " << nextValue << std::endl;
valleys.push_back(i); // 低谷
}
}
if(valleys.size()>0)
cv::threshold(temp, temp, valleys[0], 255, cv::THRESH_BINARY);
// 创建直方图可视化图像
int histWidth = 512;
int histHeight = 400;
cv::Mat histImage(histHeight, histWidth, CV_8UC3, cv::Scalar(0, 0, 0));
cv::Mat hist_temp;
// 归一化直方图数据
cv::normalize(hist, hist_temp, 0, histImage.rows, cv::NORM_MINMAX, -1, cv::Mat());
// 绘制直方图
int binWidth = cvRound((double)histWidth / histSize);
for (int i = 0; i < histSize; i++) {
int binHeight = cvRound(hist_temp.at<float>(i));
cv::line(histImage, cv::Point(i * binWidth, histHeight), cv::Point(i * binWidth, histHeight - binHeight), cv::Scalar(255, 255, 255));
}
if (valleys.size() > 0)
return valleys[0];
return 0;
}