常见的socket函数封装和多进程和多线程实现服务器并发
- 1.常见的socket函数封装
- 2.多进程和多线程实现服务器的并发
- 2.1多进程服务器
- 2.2多线程服务器
- 2.3运行效果
1.常见的socket函数封装
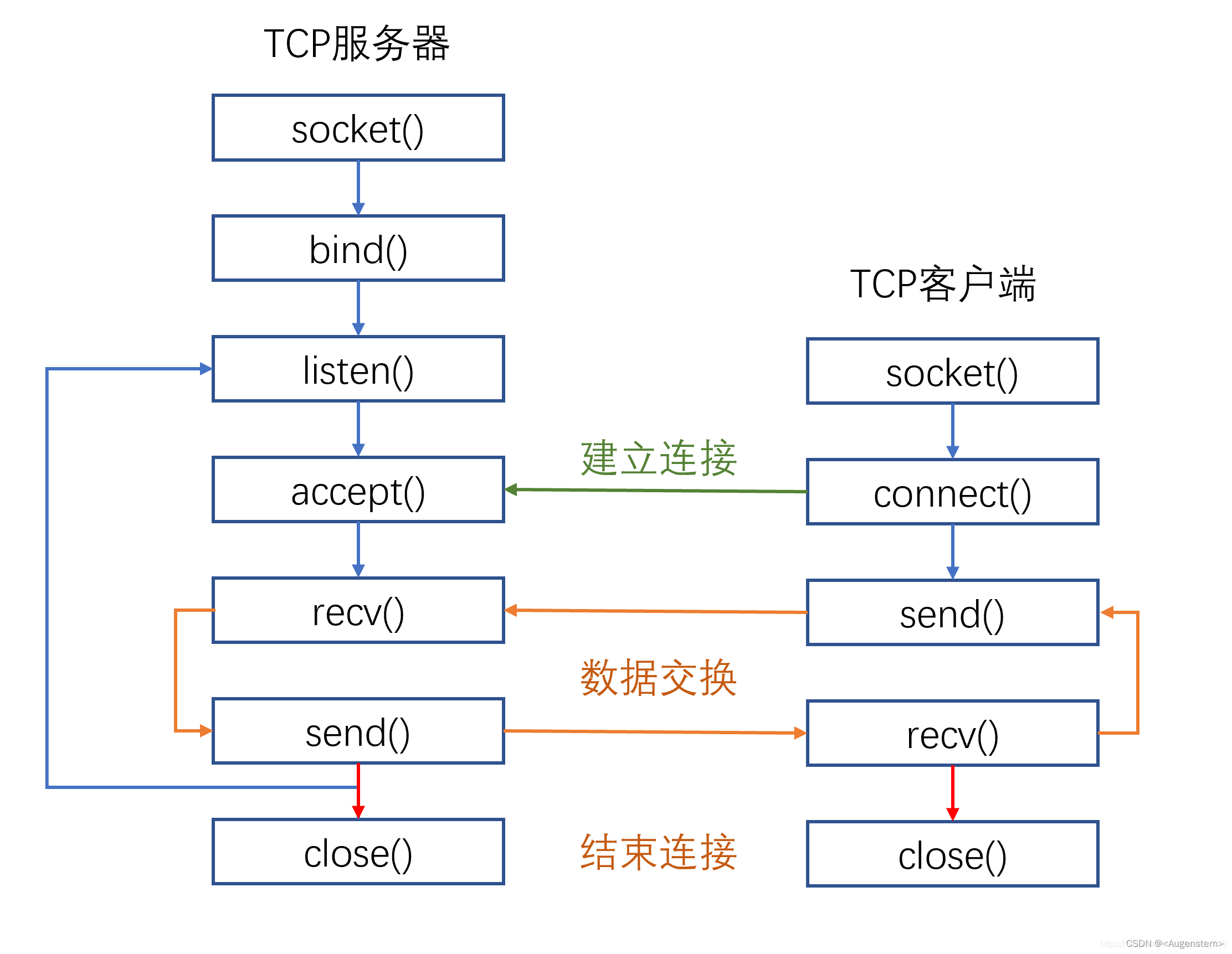
accept函数或者read函数是阻塞函数,会被信号打断,我们不能让它停止,所以我们应该进行一些封装操作。
//wrap.h
#ifndef __WRAP_H_
#define __WRAP_H_
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <strings.h>
void perr_exit(const char *s);
int Accept(int fd, struct sockaddr *sa, socklen_t *salenptr);
int Bind(int fd, const struct sockaddr *sa, socklen_t salen);
int Connect(int fd, const struct sockaddr *sa, socklen_t salen);
int Listen(int fd, int backlog);
int Socket(int family, int type, int protocol);
ssize_t Read(int fd, void *ptr, size_t nbytes);
ssize_t Write(int fd, const void *ptr, size_t nbytes);
int Close(int fd);
ssize_t Readn(int fd, void *vptr, size_t n);
ssize_t Writen(int fd, const void *vptr, size_t n);
ssize_t my_read(int fd, char *ptr);
ssize_t Readline(int fd, void *vptr, size_t maxlen);
int tcp4bind(short port,const char *IP);
#endif
下面是相关函数的实现
//wrap.c
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <strings.h>
void perr_exit(const char *s)
{
perror(s);
exit(-1);
}
int Accept(int fd, struct sockaddr *sa, socklen_t *salenptr)
{
int n;
again:
if ((n = accept(fd, sa, salenptr)) < 0) {
if ((errno == ECONNABORTED) || (errno == EINTR))
goto again;
else
perr_exit("accept error");
}
return n;
}
int Bind(int fd, const struct sockaddr *sa, socklen_t salen)
{
int n;
if ((n = bind(fd, sa, salen)) < 0)
perr_exit("bind error");
return n;
}
int Connect(int fd, const struct sockaddr *sa, socklen_t salen)
{
int n;
if ((n = connect(fd, sa, salen)) < 0)
perr_exit("connect error");
return n;
}
int Listen(int fd, int backlog)
{
int n;
if ((n = listen(fd, backlog)) < 0)
perr_exit("listen error");
return n;
}
int Socket(int family, int type, int protocol)
{
int n;
if ((n = socket(family, type, protocol)) < 0)
perr_exit("socket error");
return n;
}
ssize_t Read(int fd, void *ptr, size_t nbytes)
{
ssize_t n;
again:
if ( (n = read(fd, ptr, nbytes)) == -1) {
if (errno == EINTR)
goto again;
else
return -1;
}
return n;
}
ssize_t Write(int fd, const void *ptr, size_t nbytes)
{
ssize_t n;
again:
if ( (n = write(fd, ptr, nbytes)) == -1) {
if (errno == EINTR)
goto again;
else
return -1;
}
return n;
}
int Close(int fd)
{
int n;
if ((n = close(fd)) == -1)
perr_exit("close error");
return n;
}
2.多进程和多线程实现服务器的并发
当有多个客户端向服务器发送数据的时候,我们如何去操作,这就涉及到了我们的多线程和多进程开发了,下面看看如何来实现。
2.1多进程服务器
(1)首先我们想如何通过多进程来实现呢?那么我们得想清楚父子进程分别来干啥,我们可以这样,父进程来获取连接。
(2)然后子进程来进行通信发送数据给服务端。
(3)最后我们利用信号的方式来回收子进程,防止出现僵尸进程。
/*多进程实现并发,主进程中使用sigaction函数回收子进程*/
#include <signal.h>
#include <sys/wait.h>
#include <sys/types.h>
#include <unistd.h>
#include "wrap.h"
void sighandler(int sig)
{
pid_t wpid;
//回收子进程
while(1)
{
wpid = waitpid(-1, NULL, WNOHANG);
if(wpid <= 0)
{
break;
}
}
}
int main()
{
int lfd = Socket(AF_INET, SOCK_STREAM, 0);
//设置端口复用
int opt = 1;
setsockopt(lfd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(int));
struct sockaddr_in serverAddr;
bzero(&serverAddr, sizeof(serverAddr));
serverAddr.sin_family = AF_INET;
serverAddr.sin_port = htons(8888);
serverAddr.sin_addr.s_addr = htonl(INADDR_ANY);
Bind(lfd, (struct sockaddr*)&serverAddr, sizeof(serverAddr));
Listen(lfd, 128);
//将SIGCHLD信号阻塞
sigset_t mask;
sigemptyset(&mask);
sigaddset(&mask, SIGCHLD);
sigprocmask(SIG_BLOCK, &mask, NULL);
int cfd;
pid_t mpid;
struct sockaddr_in clientAddr;
socklen_t len = sizeof(clientAddr);
while(1)
{
cfd = Accept(lfd, (struct sockaddr*)&clientAddr, &len);
mpid = fork();
if (mpid < 0)
{
perror("fork error:");
exit(0);
}
else if (mpid > 0)
{
close(cfd);
//signal(SIGCHLD, sighandler);
//注册信号处理函数
struct sigaction act;
act.sa_handler = sighandler;
sigemptyset(&act.sa_mask);
act.sa_flags = 0;
sigaction(SIGCHLD, &act, NULL);
//解除对SIGCHLD信号的阻塞
sigprocmask(SIG_UNBLOCK, &mask, NULL);
}
else if(mpid == 0)
{
//子进程中执行消息收发
close(lfd);
char buf[1024];
int nLen;
char cIP[16];
while(1)
{
memset(buf, 0, sizeof(buf));
nLen = Read(cfd, buf, sizeof(buf));
if (nLen <= 0)
{
perror("read error:");
break;
}
printf("%s--%d: %s\n", inet_ntop(AF_INET, &clientAddr.sin_addr.s_addr, cIP, sizeof(cIP))
, ntohs(clientAddr.sin_port), buf);
strcat(buf, "---recvied");
Write(cfd, buf, strlen(buf));
}
close(cfd);
exit(0); //子进程退出,防止子进程继续创建子进程
}
}
close(lfd);
return 0;
}
2.2多线程服务器
接下来就是多线程服务器如何去实现呢?
我们可以参考上面的多进程开发:
(1)首先我们利用主进程来获取连接。
(2)然后利用子线程来和服务器进行通信给服务器发送数据。
(3)最后设置线程分离属性,任务完成后自动回收子线程。
注意:
(1)线程和进程之间是有不同的,线程的文件描述符时共享的,一旦有一个新的连接过来的时候,所有的通信文件描述符cfd都会改变,但是进程时写时拷贝的,所以进程不会出现这种情况。因此在使用线程开发时,我们要分别给他们开辟空间,这里可以用一个结构体,不同线程使用不同的空间。
(2)由于线程的文件描述符是共享的,所以我们不可以关闭父线程的通信文件描述符,这样会导致子线程的通信文件描述符全关闭,导致子线程无法正常通信;而进程程会有计数引用,只会是通信文件描述符的引用次数减1,不会直接全部关闭。
下面是代码:
/*多线程实现并发, 解决多个子线程共享cfd存在的问题*/
#include "wrap.h"
#include <pthread.h>
#define MAX_NUM 100
struct PthreadInfo
{
int cfd; //若为-1表示可用, 大于0表示已被占用
pthread_t threadID;
struct sockaddr_in clientAddr;
};
//定义结构体数组,不同的线程访问不同的内存
struct PthreadInfo info[MAX_NUM];
//线程执行函数
void* mythread(void* arg)
{
struct PthreadInfo* p = (struct PthreadInfo*)arg;
char buf[1024];
int cfd = p->cfd;
ssize_t len;
while (1)
{
memset(buf, 0, sizeof(buf));
len = Read(cfd, buf, sizeof(buf));
if (len <= 0)
{
perror("read error:");
close(cfd);
p->cfd = -1; //设置为-1表示该位置可用
pthread_exit(NULL);
}
printf("%s\n", buf);
strcat(buf, "---recvied");
Write(cfd, buf, strlen(buf));
}
}
void init_info()
{
//初始化数组,当cfd = -1时表明这块内存空间可以使用
for (size_t i = 0; i < MAX_NUM; i++)
{
info[i].cfd = -1;
}
}
int find_index()
{
int i;
for(i = 0; i < MAX_NUM; i++)
{
if (info[i].cfd == -1)
{
break;
}
}
if (i == MAX_NUM)
{
return -1;
}
return i;
}
int main()
{
int lfd = Socket(AF_INET, SOCK_STREAM, 0);
//设置端口复用
int opt = 1;
setsockopt(lfd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(int));
struct sockaddr_in serverAddr;
bzero(&serverAddr, sizeof(serverAddr));
serverAddr.sin_family = AF_INET;
serverAddr.sin_port = htons(8888);
serverAddr.sin_addr.s_addr = htonl(INADDR_ANY);
Bind(lfd, (struct sockaddr*)&serverAddr, sizeof(serverAddr));
Listen(lfd, 128);
//初始化
init_info();
int cfd;
int ret;
int idx;
socklen_t len;
struct sockaddr_in client;
while (1)
{
len = sizeof(client);
bzero(&client, len);
cfd = Accept(lfd, (struct sockaddr*)&client, &len);
//找数组中空闲的位置
idx = find_index();
if (idx == -1)
{
close(cfd);
continue;
}
//对空闲位置的元素的成员赋值
info[idx].cfd = cfd;
memset(&info[idx].clientAddr, &client, len);
//创建子线程---该子线程完成对数据的收发
ret = pthread_create(&info[idx].threadID, NULL, mythread, &info[idx]);
if(ret!=0)
{
printf("create thread error:[%s]\n", strerror(ret));
exit(-1);
}
//设置子线程为分离属性
pthread_detach(info[idx].threadID);
}
close(lfd);
return 0;
}
我们在写的时候发现当一些进程完成通信以后,关闭文件描述符,我们的空间是无法进行回收的,这样就会大大浪费空间,因此我们可以写一个函数来返回结束通信的空间位置可利用的空间,来使用这块空间。
int find_index()
{
int i;
for(i = 0; i < MAX_NUM; i++)
{
if (info[i].cfd == -1)
{
break;
}
}
if (i == MAX_NUM)
{
return -1;
}
return i;
}
2.3运行效果
下面我们看看效果
1.这是连接的第一个客户端,可以看到通信正常
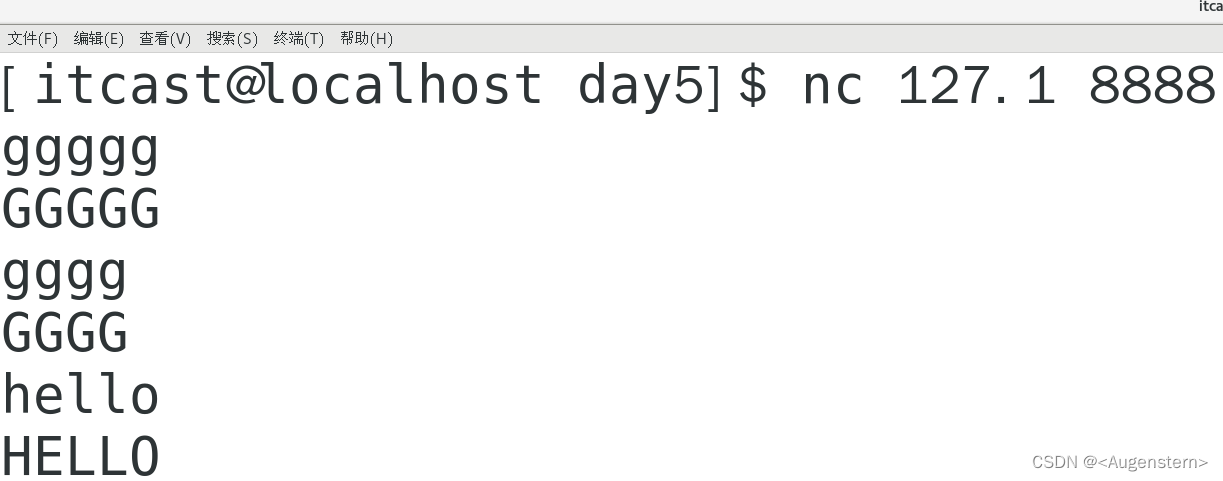
2.这是连接的第二个客户端,通信也正常
 3.我们用命令来看看连接的状态
3.我们用命令来看看连接的状态
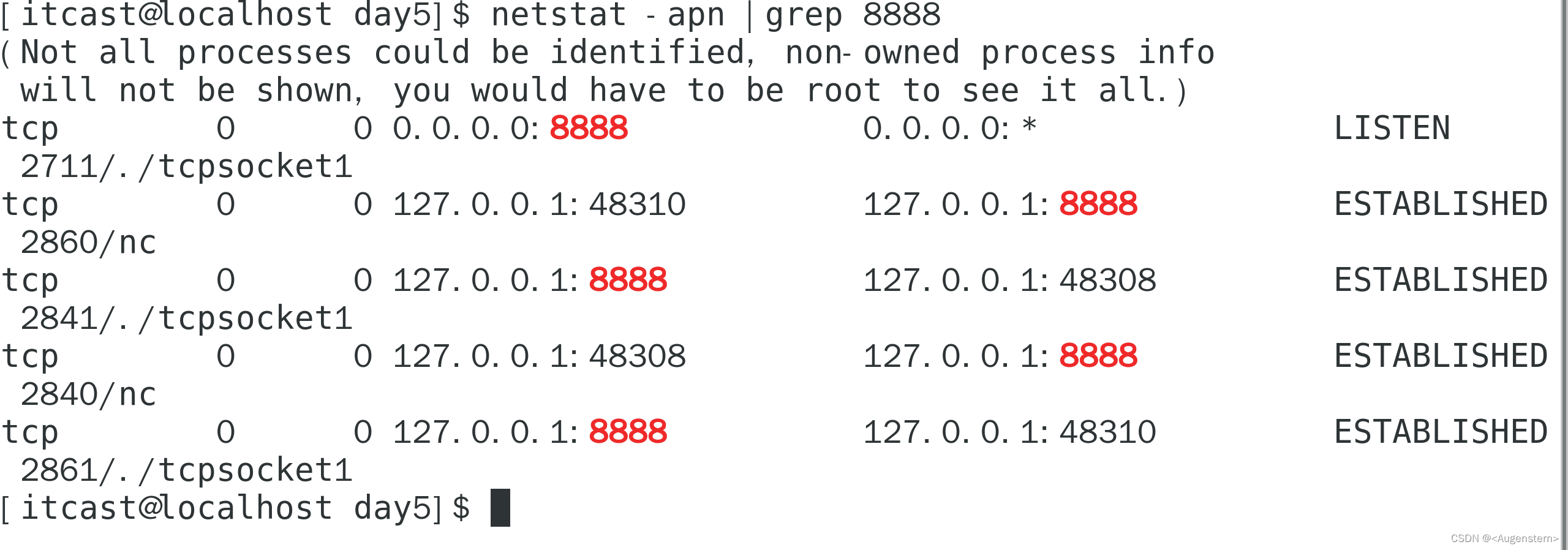
可以看到tcp连接是一个双向的可靠连接,我们连接了两个客户端,所以有四个连接,可以看到都处于ESTABLISHESD的状态,可以看出是达到了效果。两个客户端和服务端的通信都是正常的。