目录
空间分辨率(Spatial Resolution)
1.MODIS(搭载在Aqua 和 Terra 卫星上)
2. TM(搭载在早期LandSat卫星上)
3.MSI(搭载在在Sentinel-2 卫星上)
4.NAIP
空间分辨率(Spatial Resolution)
空间分辨率与单个像素覆盖的地球表面面积有关。 它通常以线性单位表示,用于方形像素的单边:例如,我们通常说 Landsat 7 具有30 m彩色图像,这意味着每个像素边长为 30 m,覆盖地球表面的总面积为 900㎡。 空间分辨率通常也称为尺度,正如我们在本章中打印该值时所看到的那样。 当您在地球表面查看图像时,给定数据集的空间分辨率会极大地影响图像及其信息的外观。
接下来,我们将可视化来自以不同空间分辨率捕获数据的多个传感器的数据,以比较不同像素大小对图像中的信息和细节的影响。 我们将从每个 ImageCollection 中选择一个图像进行可视化。 为了查看图像,我们将它们分别绘制为彩色红外图像,这是一种使用红外、红色和绿色波段的伪彩色图像。 当您浏览练习的这一部分时,放大和缩小以查看像素大小和图像大小的差异。
1.MODIS(搭载在Aqua 和 Terra 卫星上)
正如前面内容中所讨论的,MODIS采集的红外、红、绿波段常用分辨率为500m,这意味着每个像素的边长为 500m,因此一个像素代表地球表面 0.25平方千米的面积。 使用以下代码将地图置于旧金山机场的中心,缩放级别为 16。
//
// Explore spatial resolution
//
// Define a region of interest as a point at San Francisco airport.
var sfoPoint = ee.Geometry.Point(-122.3774, 37.6194);
// Center the map at that point.
Map.centerObject(sfoPoint, 16);让我们使用上一节中学到的知识来搜索 MODIS 数据、获取相关信息并将其导入到 Earth Engine 工作区中。 首先在地球引擎搜索栏中搜索“MODIS 500”(图1)。
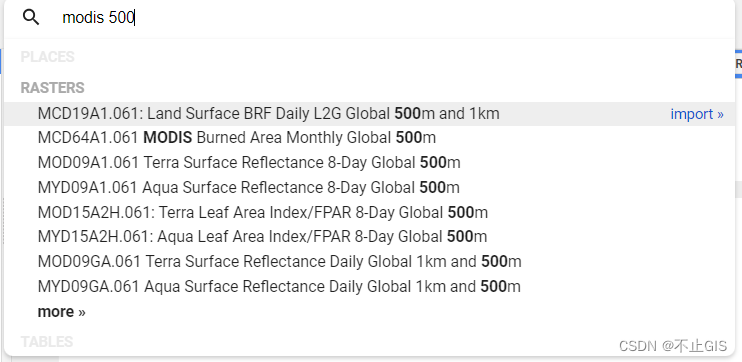
图1 使用搜索栏 搜索MODIS数据集
使用它导入“MOD09A1.061 Terra Surface Reflectance 8-day Global500 m”图像集合,导入的默认名称出现在脚本的顶部, 将导入的名称更改为 mod09(图2)。 探索新数据集时,您可以通过阅读数据集的摘要文档(称为元数据)来查找该集中图像中的波段名称。 在此数据集中,彩色红外图像的三个波段是“sur_refl_b02”(红外)、“sur_refl_b01”(红色)和“sur_refl_b04”(绿色)。

图2 重命名导入的MODIS数据集
// MODIS
// Get an image from your imported MODIS MYD09GA collection.
var modisImage = mod09.filterDate('2020-02-01', '2020-03-01').first();
// Use these MODIS bands for near infrared, red, and green,respectively.
var modisBands = ['sur_refl_b02', 'sur_refl_b01','sur_refl_b04'];
// Define visualization parameters for MODIS.
var modisVis = {
bands: modisBands,
min: 0,
max: 3000
};
// Add the MODIS image to the map.
Map.addLayer(modisImage, modisVis, 'MODIS');在地图窗口中,您现在应该看到类似这样的内容(图3)。
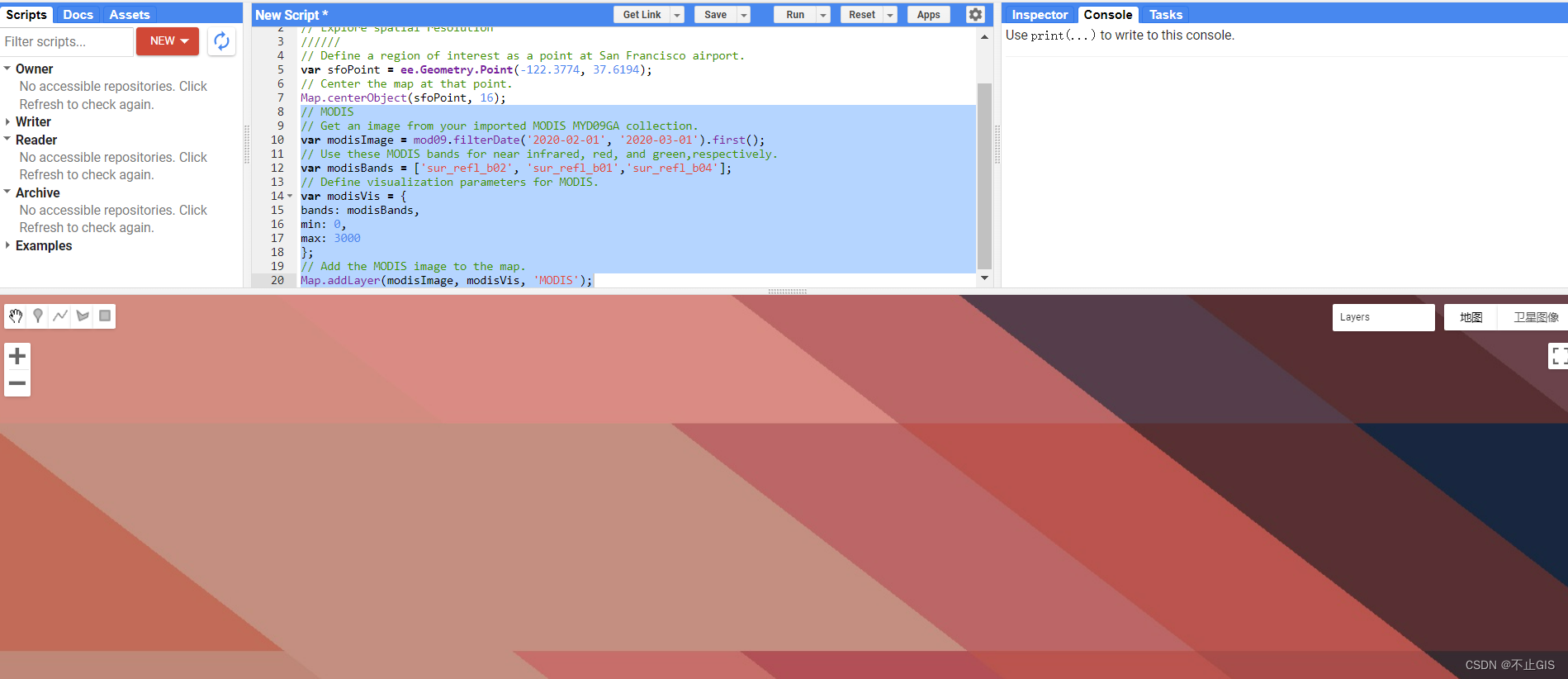
图3 查看旧金山机场的 MODIS 图像
您可能会惊讶地发现通常称为“正方形”的像素显示为平行四边形。 像素的形状和方向由数据集的“投影”以及我们查看它们的投影控制。大多数用户不必非常关心 Earth Engine 中的不同投影,它会自动在不同的投影之间传输数据。
让我们查看相对于地面物体的像素大小。 单击地图窗口右上角的卫星,打开卫星底图以查看高分辨率数据进行比较。 然后,降低图层的不透明度:使用图层滑块在图层管理器中设置不透明度。 结果将如图 4 所示。
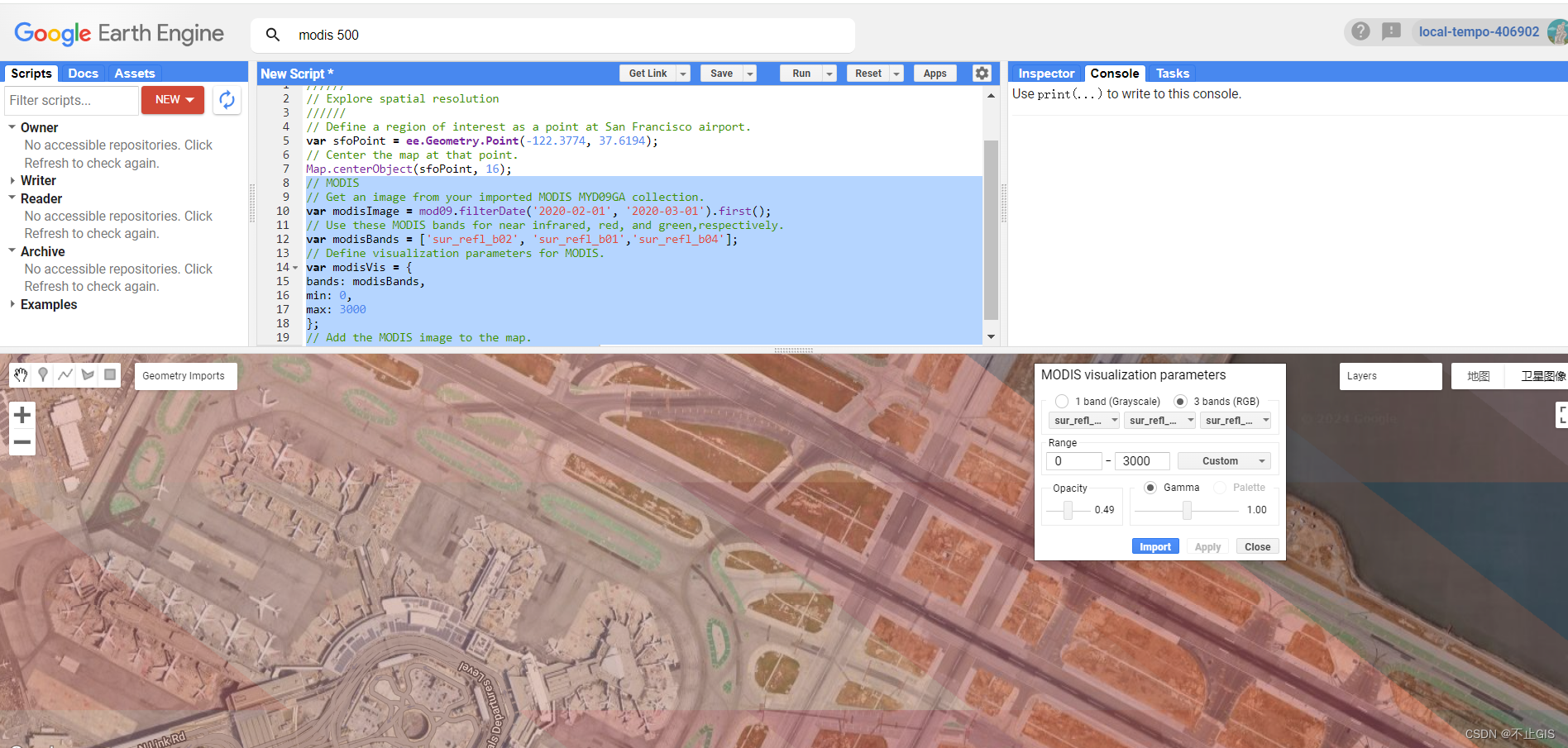
图 4 使用透明度查看 MODIS 像素大小与旧金山机场高分辨率图像的关系
通过运行以下代码打印像素的大小(以米为单位):
// Get the scale of the data from the NIR band's projection:
var modisScale = modisImage.select('sur_refl_b02').projection().nominalScale();
print('MODIS NIR scale:', modisScale);在那次调用中,我们在访问 MODIS NIR 波段的投影信息后使用了nominalScale 函数。 该函数以适合打印到屏幕的格式从投影信息中提取空间分辨率。 由于 MODIS 数据的正弦投影以及像素距天底(即卫星直接指向地球表面的位置)的距离,nominalScale 函数返回的值略低于规定的 500 m 分辨率(图5)。

图5 nominalScale 函数返回的值
2. TM(搭载在早期LandSat卫星上)
Landsat 4 和 5 上搭载了专题制图仪(TM) 传感器。TM 数据已处理为 30 m 的空间分辨率,并在 1982 年至 2012 年期间处于活动状态。搜索“Landsat 5 TM”并导入名为“USGS Landsat 5 TM Collection 2 Tier 1 Raw Scenes”的结果。 以与重命名 MODIS 集合相同的方式,重命名为tm。在此数据集中,彩色红外图像的三个波段称为“B4”(红外)、“B3”(红色)和“B2”(绿色)。 现在让我们可视化机场的 TM 数据并将其与 MODIS 数据进行比较。 请注意,我们可以将可视化参数定义为变量(如前面的代码片段所示),也可以将它们放在 Map.addLayer 函数中的大括号中(如此代码片段所示)。当您运行此代码时,TM 图像将 展示。 请注意与 MODIS 图像相比,屏幕上显示的像素多了多少(图6)。
// TM
// Filter TM imagery by location and date.
var tmImage = tm.filterBounds(Map.getCenter()).filterDate('1987-03-01', '1987-08-01').first();
// Display the TM image as a false color composite.
Map.addLayer(tmImage, {
bands: ['B4', 'B3', 'B2'],
min: 0,
max: 100
}, 'TM');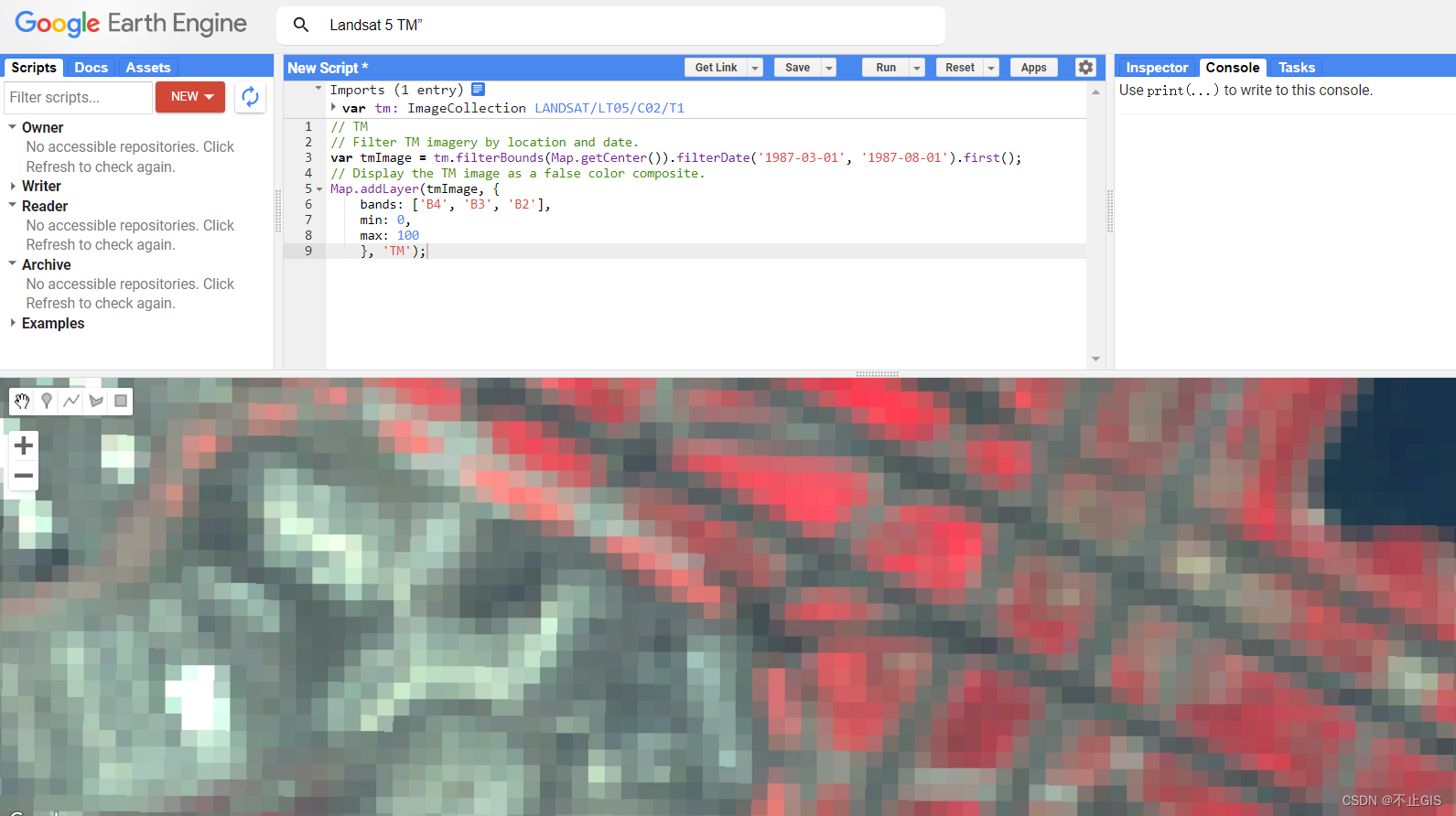 图6 可视化来自 Landsat 5 卫星的 TM 图像
图6 可视化来自 Landsat 5 卫星的 TM 图像
正如我们对 MODIS 数据所做的那样,让我们检查一下比例。 比例尺以米表示:
// Get the scale of the TM data from its projection:
var tmScale = tmImage.select('B4').projection().nominalScale();
print('TM NIR scale:', tmScale);
图6 nominalScale 函数返回的值
3.MSI(搭载在在Sentinel-2 卫星上)
多光谱仪器 (MSI) 搭载在欧洲航天局运营的 Sentinel-2 卫星上。 红色、绿色、蓝色和近红外波段以 10 m 分辨率捕获,而其他波段以 20 和 30 m 捕获。 Sentinel-2A 卫星于 2015 年发射,2B 卫星于 2017 年发射。在搜索栏中搜索“Sentinel 2 MSI”,并将“Sentinel-2 MSI:MultiSpectral Instrument,Level-1C”数据集添加到您的工作区 。 将其命名为 MSI。 在此数据集中,彩色红外图像的三个波段称为“B8”(红外)、“B4”(红色)和“B3”(绿色)。
// MSI
// Filter MSI imagery by location and date.
var msiImage = msi.filterBounds(Map.getCenter())
.filterDate('2020-02-01', '2020-04-01').first();
// Display the MSI image as a false color composite.
Map.addLayer(msiImage, {
bands: ['B8', 'B4', 'B3'],
min: 0,
max: 2000
}, 'MSI');使用不透明度滑块将 MSI 影像与 TM 和 MODIS 影像进行比较。 请注意您可以看到机场航站楼和周围景观的更多细节。 10 m 空间分辨率意味着每个像素覆盖地球表面约 100㎡,比 TM 影像(900㎡)或 MODIS 影像(0.25 km²)小得多(图7)。 显示的 MSI 图像也比我们见过的其他仪器要小。 缩小直到您可以看到整个旧金山湾,MODIS 图像覆盖了整个地球,TM 图像覆盖了整个旧金山湾和蒙特雷以南的周边地区,而 MSI 图像捕获的区域要小得多(图8)。
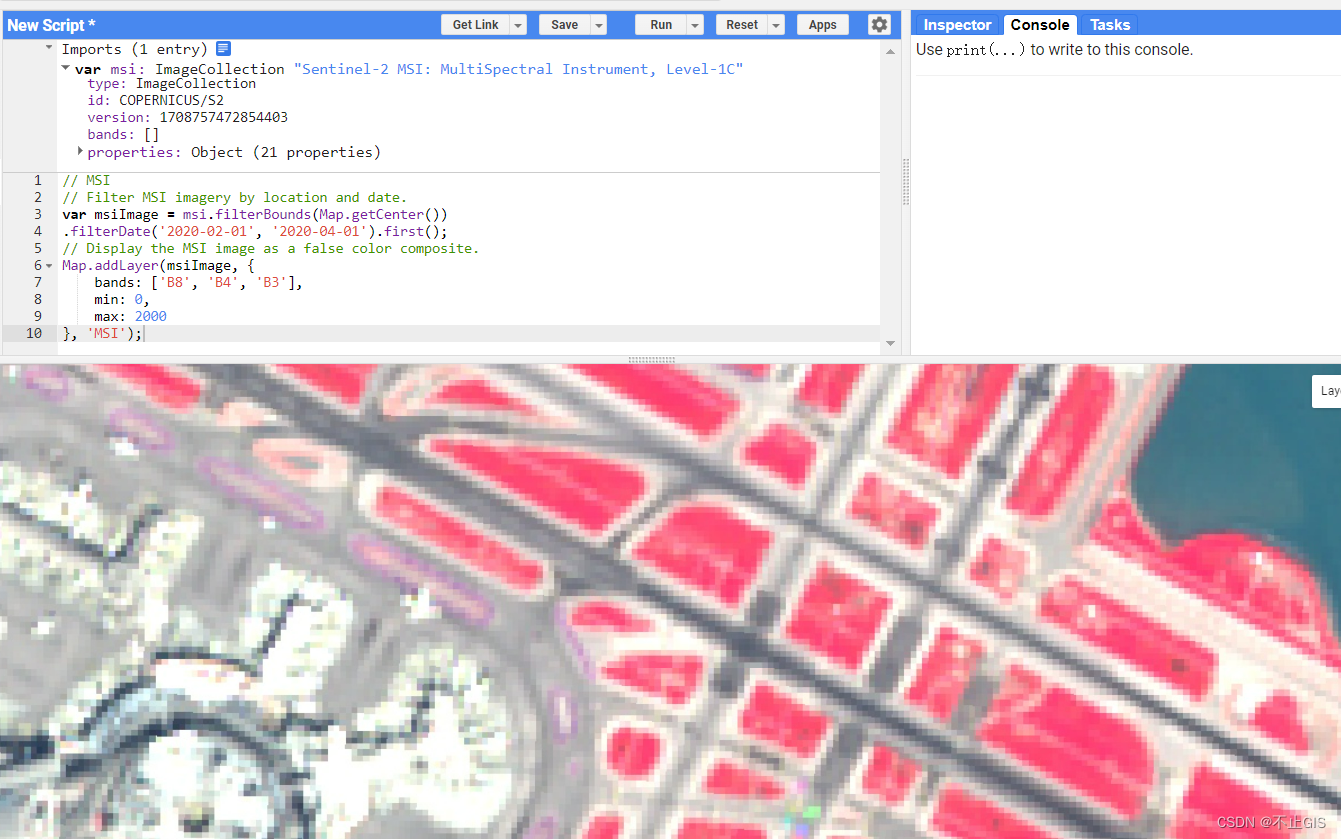
图7 可视化MSI图像

图8 MODIS、Landsat 5(TM 仪器)和 Sentinel-2(MSI 仪器)数据集的图像大小可视化
检查MSI传感器的分辨率(以米为单位),如图9所示:
// Get the scale of the MSI data from its projection:
var msiScale = msiImage.select('B8').projection().nominalScale();
print('MSI scale:', msiScale);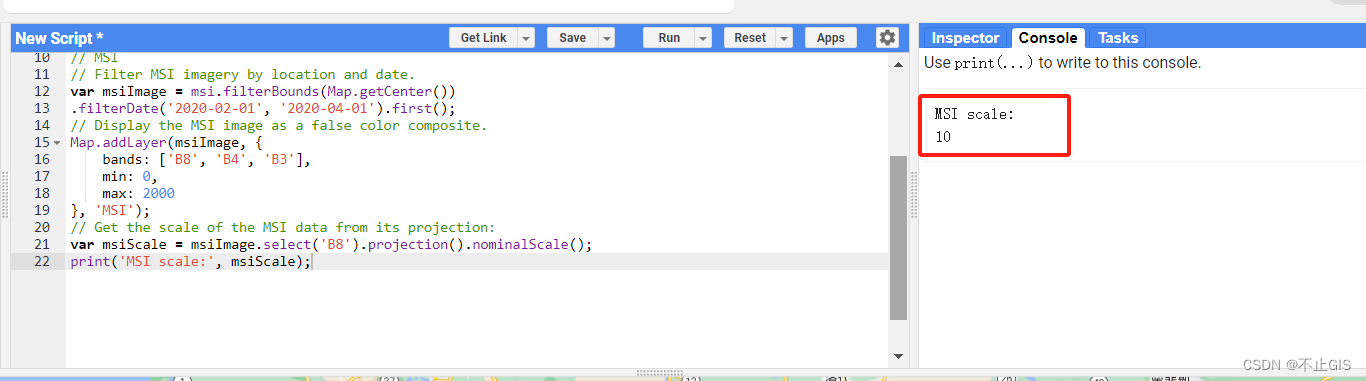 图9 MSI传感器的分辨率
图9 MSI传感器的分辨率
4.NAIP
国家农业图像计划 (NAIP) 是美国政府的一项计划,旨在使用机载传感器获取美国大陆的图像, 大约每三年收集一次每个州的数据。 图像的空间分辨率为 0.5–2 m,具体取决于州和收集的日期。 搜索“naip”并导入“NAIP:国家农业影像计划”的数据集。 将导入命名为 naip,在此数据集中,彩色红外图像的三个波段称为“N”(红外)、“R”(红色)和“G”(绿色)。
/ NAIP
// Get NAIP images for the study period and region of interest.
var naipImage = naip.filterBounds(Map.getCenter())
.filterDate('2018-01-01', '2018-12-31')
.first();
// Display the NAIP mosaic as a color-IR composite.
Map.addLayer(naipImage, {
bands: ['N', 'R', 'G']
}, 'NAIP');NAIP 图像比 Sentinel-2 MSI 图像在空间上更加详细。 然而,我们可以看到我们的一张 NAIP 图像并未完全覆盖旧金山机场。 如果您愿意,可以缩小以查看 NAIP 图像的边界,就像我们对 Sentinel-2 MSI 图像所做的那样(图 10)。并获取比例,就像我们之前所做的那样。

图10 旧金山机场上空的 NAIP 彩色红外合成图
// Get the NAIP resolution from the first image in the mosaic.
var naipScale = naipImage.select('N').projection().nominalScale();
print('NAIP NIR scale:', naipScale);我们检查的每个数据集都有不同的空间分辨率。 通过比较空间中同一位置的不同图像,您可以看到 MODIS 大像素、TM (Landsat 5) 和 MSI (Sentinel-2) 中型像素以及 NAIP 小像素之间的差异,大像素的数据集也称为“粗分辨率”,中等像素的数据集也称为“中分辨率”,小像素的数据集也称为“精细分辨率”。
![[极客挑战2019]HTTP](https://img-blog.csdnimg.cn/direct/86be3ad122b343f39c2b72ac4d9f0549.png)