时序预测 | Matlab实现BO-LSSVM贝叶斯算法优化最小二乘支持向量机时间序列预测
目录
- 时序预测 | Matlab实现BO-LSSVM贝叶斯算法优化最小二乘支持向量机时间序列预测
- 预测效果
- 基本介绍
- 程序设计
- 参考资料
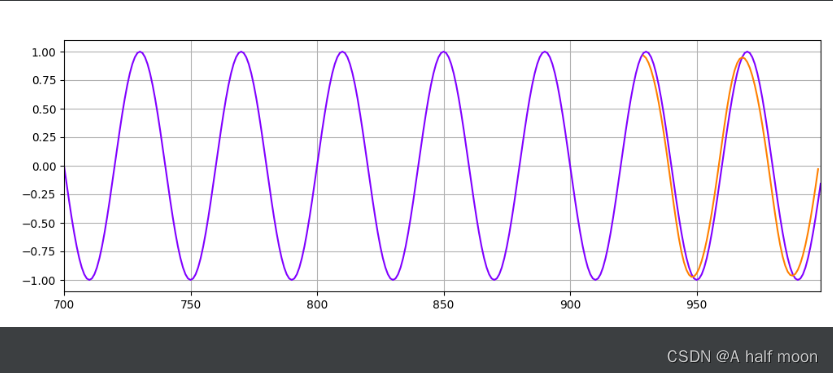
预测效果











基本介绍
Matlab实现BO-LSSVM贝叶斯算法优化最小二乘支持向量机时间序列预测(完整源码和数据)
1.data为数据集,单列时间序列数据,excel数据,方便替换。
2.main.m为程序主文件,其余为函数文件无需运行。
3.命令窗口输出MAE、MAPE、RMSE和R2,可在下载区获取数据和程序内容。
4.贝叶斯算法最小二乘支持向量机,优化RBF 核函数gam和sig。
注意程序和数据放在一个文件夹,运行环境为Matlab2020及以上.
代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。
程序设计
- 完整源码和数据获取方式资源出下载Matlab实现BO-LSSVM贝叶斯算法优化最小二乘支持向量机时间序列预测 。
% 训练集和测试集划分
outdim = 1; % 最后一列为输出
num_size = 0.7; % 训练集占数据集比例
num_train_s = round(num_size * num_samples); % 训练集样本个数
f_ = size(res, 2) - outdim; % 输入特征维度
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);
P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);
% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);
%% 相关指标计算
% R2
R1 = 1 - norm(T_train - T_sim1)^2 / norm(T_train - mean(T_train))^2;
R2 = 1 - norm(T_test - T_sim2)^2 / norm(T_test - mean(T_test ))^2;
disp(['训练集数据的R2为:', num2str(R1)])
disp(['测试集数据的R2为:', num2str(R2)])
% MAE
mae1 = sum(abs(T_sim1 - T_train)) ./ M ;
mae2 = sum(abs(T_sim2 - T_test )) ./ N ;
disp(['训练集数据的MAE为:', num2str(mae1)])
disp(['测试集数据的MAE为:', num2str(mae2)])
% MAPE
maep1 = sum(abs(T_sim1 - T_train)./T_train) ./ M ;
maep2 = sum(abs(T_sim2 - T_test )./T_test) ./ N ;
disp(['训练集数据的MAPE为:', num2str(maep1)])
disp(['测试集数据的MAPE为:', num2str(maep2)])
% RMSE
RMSE1 = sqrt(sumsqr(T_sim1 - T_train)/M);
RMSE2 = sqrt(sumsqr(T_sim2 - T_test)/N);
disp(['训练集数据的RMSE为:', num2str(RMSE1)])
disp(['测试集数据的RMSE为:', num2str(RMSE2)])
参考资料
[1] https://blog.csdn.net/kjm13182345320/article/details/128577926?spm=1001.2014.3001.5501
[2] https://blog.csdn.net/kjm13182345320/article/details/128573597?spm=1001.2014.3001.5501