paper:Deep Layer Aggregation
official implementation:https://github.com/ucbdrive/dla
third-party implementation:https://github.com/huggingface/pytorch-image-models/blob/main/timm/models/dla.py
本文的创新点
骨干网络的设计主要关注于设计出更深更宽的网络,但是如何更好的聚合不同layer和block的信息缺乏足够的关注。虽然skip connection已经被用来组合不同的网络层,但这些连接本身都是“浅层的”并且只是通过简单的单步操作进行融合。本文通过更深层的聚合来更好的实现跨层信息的融合,提出了深层聚合结构deep layer aggregation,通过迭代、分层级的合并特征,使得网络具有更高的精度以及更少的参数。
方法介绍

Iterative Deep Aggregation
迭代的深度聚合遵循骨干架构迭代堆叠的方式,根据特征分辨率将网络stacked blocks划分为不同的stage,更深的stage语义信息更丰富但空间信息更粗糙。skip connection从浅层到深层合并尺度和分辨率。但是现有网络中的跳跃连接如FCN、U-Net、FPN是线性的并且浅层的信息聚合的最少,如图2(b)所示
本文提出逐步progressively聚合并用IDA加深表示。聚合从最浅、最小尺度开始迭代的合并更深、更大的尺度。通过这种方式,浅层特征传播到不同聚合阶段并得到细化refined。IDA的结构如图2(c)所示
Hierarchical Deep Aggregation
层级深度聚合合并树tree中的block和stage来保持与合并特征通道。通过HDA,浅层和深层被组合起来学习跨越更多特征层级的更丰富的组合。尽管IDA有效的结合了各个stage,但仍不足以融合网络了多个block因为它是按顺序的。层级聚合的深层、分支结构如图2(d)所示
在构建了HDA的通用结构后我们可以进一步优化深度和效率。不是仅仅将中间聚合传送到树的上层,相反作者将一个聚合节点的输出传回到backbone作为下一个子树的输入,如图2(e)所示。这种方式传播了所有之前的block而不仅仅是前一个单独的block,从而更好的保存的特征。为了提高效率,作者合并了相同深度的聚合节点(合并父节点和左子节点)如图2(f)所示,这样就得到了最终的结构。
Architectural Elements
Aggregation Nodes 聚合节点的主要作用是组合和压缩输入。节点学习挑选和映射重要的信息来保持输出与单个输入相同的维度。IDA节点的参数总是两个,而HDA的参数数量取决于树的深度。
尽管聚合节点可以是任何block或layer,但为了简单和效率作者只用了一个卷积接一个BN和非线性层。在分类网络中,所有的节点都使用1x1卷积。在语义分割网络中,作者额外添加了一个层级的迭代深度聚合来进行特征插值,这里使用3x3卷积。
残差连接对于组合非常深的网络非常重要,我们也可以在聚合节点中加入残差连接。但它们对于聚合是否有必要还不清楚。使用HDA,任何block到root的最短路径最大是层级结构的深度,因此沿着聚合路径不太可能出现梯度消失或梯度爆炸。作者通过实验发现当最深的层级有4层或更多时节点中的残差连接对HDA有帮助,而对于更小的层级可能会伤害网络。
Blocks and Stages 深层聚合是一个通用结构,可以与任何backbone兼容,因此对block和stage的内部结构没有要求。
作者在实验中用了三种不同类型的residual block,Basic block、Bottleneck block、Split block。
Applications
Classification Networks
作者用IDA和HDA增强了ResNet和ResNeXt,它们都是划分了stage的网络,即根据分辨率对block进行了分组,每个block内包含残差连接。每个stage结束分辨率减半,一共6个stage,第一阶段保持输入分辨率,最后一个阶段下采样32x。最后的特征图通过全局平均池化接一个线性层,最后通过softmax得到预测结果。
我们用IDA进行跨stage连接,并用HDA进行stage内部和跨stage的连接。通过共享聚合节点可以很容易的进行聚合,只需要在每个层级更换根节点。每个stage通过size=2, stride=2的max pooling进行下采样。
最前面的stage有单独的结构。和DRN一样,在stage1-2中,作者用strided卷积替换max pooling。stage1包括一个7x7的卷积和一个basic block,stage2只包含一个basic block。在其它的stage中,组合使用IDA和HDA。

为了直接比较不同网络中的层和参数,作者构建了和ResNet-34、ResNet-50、ResNet-101层数相同的网络,具体如表1所示。
Dense Prediction Networks
语义分割、轮廓检测和其他image-to-image的任务可以利用聚合来融合局部和全局信息。从分类DLA到全卷积DLA的转换很简单和其它结构没什么区别。我们利用插值以及IDA的增强来得到需要的输出分辨率。
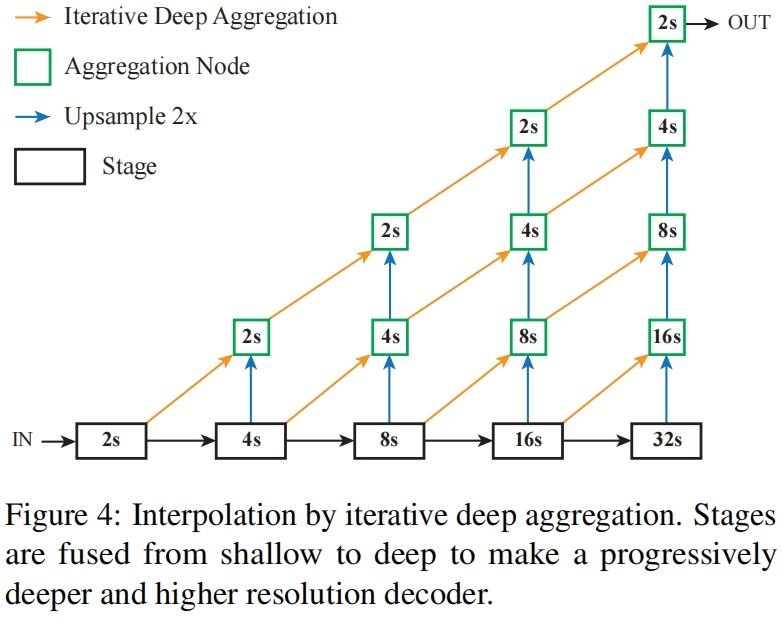
如图4所示,用于插值的IDA通过投影和上采样增加了深度和分辨率。所有的投影和上采样参数是在网络优化过程中学习到的。上采样初始化为双线性插值然后可以像FCN中一样进行学习。首先将stage3-6的输出映射为32通道,然后插值到和stage2同样的分辨率。然后迭代的聚合这些stage来学习低级和高级特征的深度融合。虽然聚合与FCN中的skip connection、hypercolumn features、FPN的top-down connection的目的相同,但具体的方法不同,聚合从浅到深进一步细化特征。注意这里IDA用了两次,一次在backbone用于connect stages,一次用于恢复分辨率。
代码解析
这里以timm中的实现为例介绍一下代码,我们可以用预训练模型测试自己的图片,测试代码如下
from PIL import Image
from timm.data import resolve_data_config
from timm.data.transforms_factory import create_transform
import torch
import timm
model = timm.create_model('dla34', pretrained=True)
model.eval()
config = resolve_data_config({}, model=model)
transform = create_transform(**config)
filename = '/disk1/tmp/test.jpg'
img = Image.open(filename).convert('RGB')
tensor = transform(img).unsqueeze(0) # transform and add batch dimension
with torch.no_grad():
out = model(tensor)
probabilities = torch.nn.functional.softmax(out[0], dim=0)
print(probabilities.shape) # torch.Size([1000])这里调用的是'dla34',如下,对应表1中DLA-34的配置
@register_model
def dla34(pretrained=False, **kwargs): # DLA-34
model_kwargs = dict(
levels=[1, 1, 1, 2, 2, 1], channels=[16, 32, 64, 128, 256, 512],
block=DlaBasic, **kwargs)
return _create_dla('dla34', pretrained, **model_kwargs)网络的前向结构如下
def forward_features(self, x): # (1,3,224,224)
x = self.base_layer(x) # (1,16,224,224)
x = self.level0(x) # (1,16,224,224)
x = self.level1(x) # (1,32,112,112)
x = self.level2(x) # (1,64,56,56)
x = self.level3(x) # (1,128,28,28)
x = self.level4(x) # (1,256,14,14)
x = self.level5(x) # (1,512,7,7)
return x其中self.base_layer,self.level0,self.level1的结构如下
Sequential(
(0): Conv2d(3, 16, kernel_size=(7, 7), stride=(1, 1), padding=(3, 3), bias=False)
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
Sequential(
(0): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)self.level2 - self.level5都是DLA结构
self.level2 = DlaTree(levels[2], block, channels[1], channels[2], 2, level_root=False, **cargs)
self.level3 = DlaTree(levels[3], block, channels[2], channels[3], 2, level_root=True, **cargs)
self.level4 = DlaTree(levels[4], block, channels[3], channels[4], 2, level_root=True, **cargs)
self.level5 = DlaTree(levels[5], block, channels[4], channels[5], 2, level_root=True, **cargs)DLATree的实现如下
class DlaTree(nn.Module):
def __init__(
self, levels, block, in_channels, out_channels, stride=1, dilation=1, cardinality=1,
base_width=64, level_root=False, root_dim=0, root_kernel_size=1, root_shortcut=False):
super(DlaTree, self).__init__()
if root_dim == 0:
root_dim = 2 * out_channels
if level_root: # level_root表示需要加上上一个stage的绿框
root_dim += in_channels
self.downsample = nn.MaxPool2d(stride, stride=stride) if stride > 1 else nn.Identity()
self.project = nn.Identity()
cargs = dict(dilation=dilation, cardinality=cardinality, base_width=base_width)
if levels == 1:
self.tree1 = block(in_channels, out_channels, stride, **cargs)
self.tree2 = block(out_channels, out_channels, 1, **cargs)
if in_channels != out_channels:
# NOTE the official impl/weights have project layers in levels > 1 case that are never
# used, I've moved the project layer here to avoid wasted params but old checkpoints will
# need strict=False while loading.
self.project = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(out_channels))
self.root = DlaRoot(root_dim, out_channels, root_kernel_size, root_shortcut)
else:
cargs.update(dict(root_kernel_size=root_kernel_size, root_shortcut=root_shortcut))
self.tree1 = DlaTree(
levels - 1, block, in_channels, out_channels, stride, root_dim=0, **cargs)
self.tree2 = DlaTree(
levels - 1, block, out_channels, out_channels, root_dim=root_dim + out_channels, **cargs)
self.root = None
self.level_root = level_root
self.root_dim = root_dim
self.levels = levels
def forward(self, x, shortcut: Optional[torch.Tensor] = None, children: Optional[List[torch.Tensor]] = None):
if children is None:
children = []
bottom = self.downsample(x)
shortcut = self.project(bottom)
if self.level_root:
children.append(bottom) # 上一个stage的绿框
x1 = self.tree1(x, shortcut)
if self.root is not None: # levels == 1
x2 = self.tree2(x1)
x = self.root([x2, x1] + children) # x2是绿框正下面的黑框,x1是绿框左下角的黑框,children是所有输入绿框(包括同一和上一阶段)
else:
children.append(x1) # 同一个stage前面的绿框
x = self.tree2(x1, None, children)
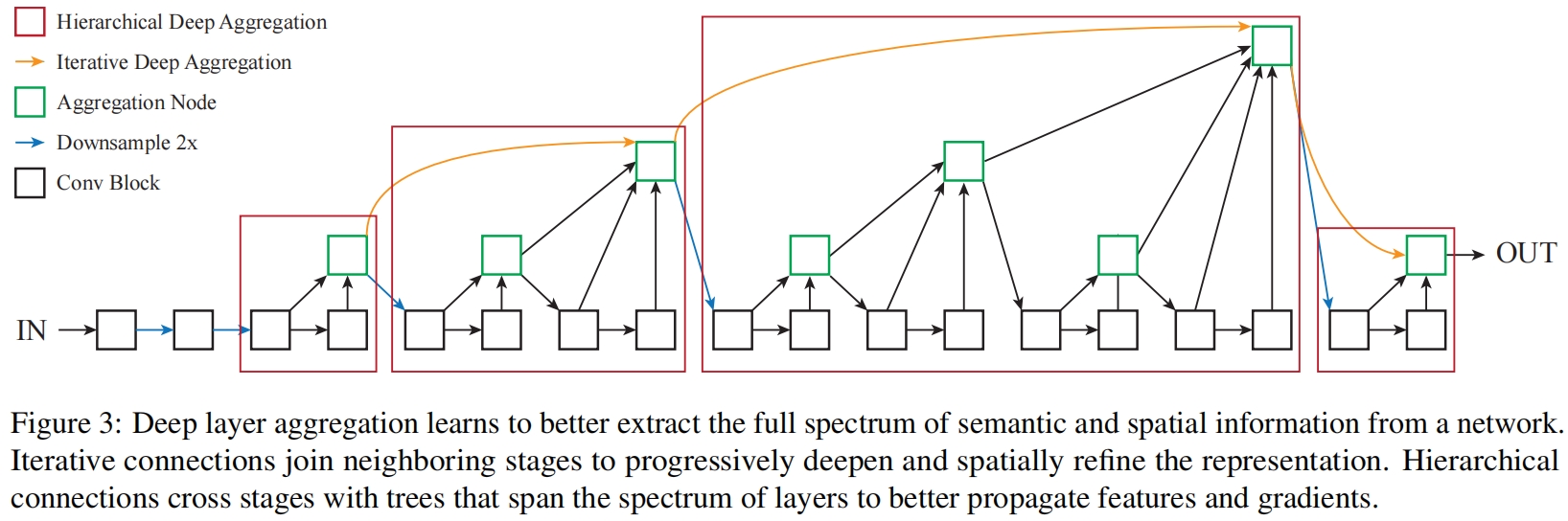
return x这里可以对照图3看,首先self.level2中的level=1,对应图3中第一个红框,这里tree1和tree2都是basic block,树的高度为1没有子树。forward中最后的x1和x2分别对应图3中绿框左下的黑框和正下方的黑框。self.level2的入参level_root=False,在初始化时只有当level_root=True时,root_dim才加上in_channels,这里的in_channles表示这一阶段的输入通道数如图3所示即上一阶段最后一个绿框的通道数。
再看self.level3,levels=2了,左子树self.tree1和右子树self.tree2分别递归调用DlaTree,forward函数中,self.tree1得到的x1是左下的第一个绿框,列表children里存的是上一个stage最后的绿框以及当前stage中除最后输出绿框外所有前面的绿框。self.tree2的输入包括第一个绿框x1和children,对x1处理后得到右下的两个黑框[x1, x2]并与children拼接起来得到四个输入经过self.root的处理得到最终输出。