这里写目录标题
- 一、定时器概述(了解)
- 1.1,软件定时原理
- 1.2,定时器定时原理
- 1.3,STM32定时器分类
- 1.4,STM32定时器特性表
- 1.5,STM32基本、通用、高级定时器的功能整体区别
- 二、基本定时器(掌握)
- 2.1,基本定时器简介(了解)
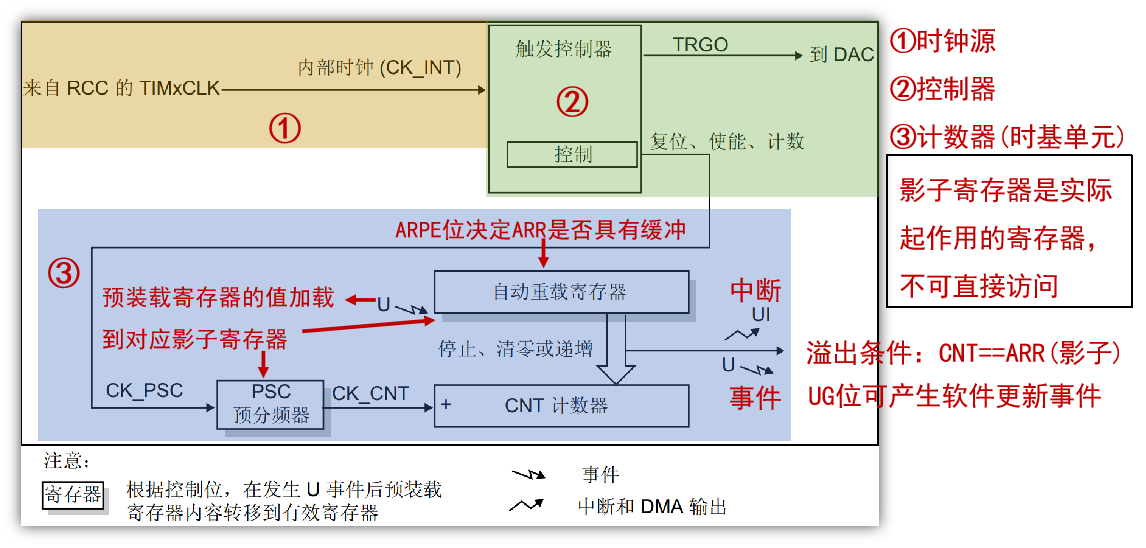
- 2.2,基本定时器框图(熟悉)
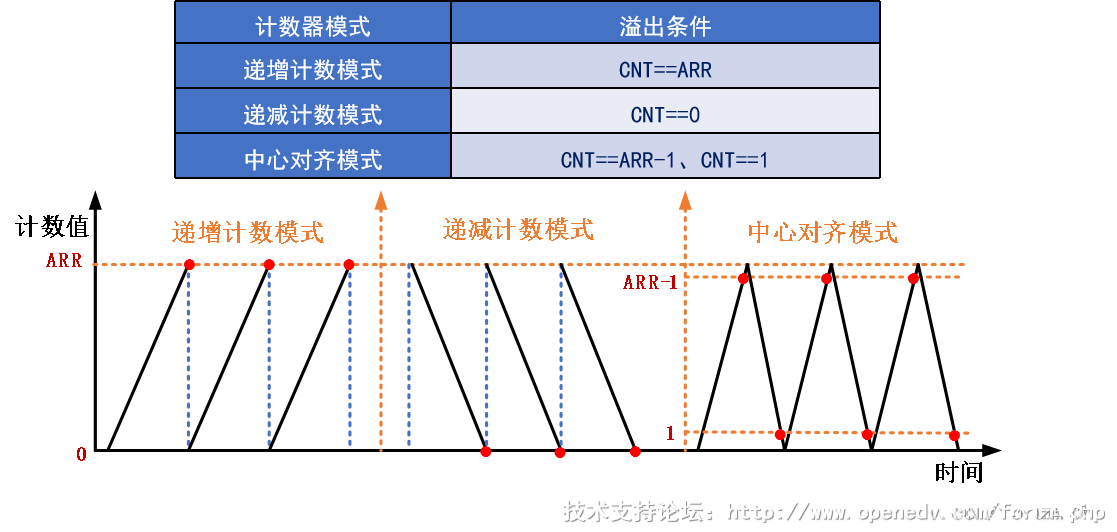
- 2.3,定时器计数模式及溢出条件(熟悉)
- 2.4,定时器中断实验相关寄存器(了解)
- 2.5,定时器溢出时间计算方法(掌握)
- 2.6,定时器中断实验配置步骤(掌握)
- 2.7,编程实战:定时器中断实验(掌握)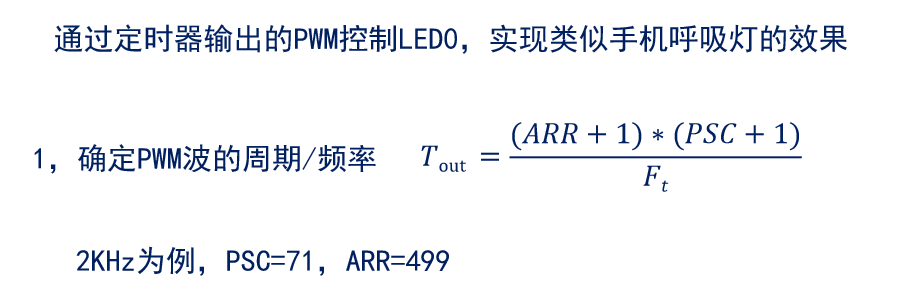
- 3.5,通用定时器输入捕获实验(掌握)
- 3.5.1,通用定时器输入捕获部分框图介绍(熟悉)
- 3.5.2,通用定时器输入捕获脉宽测量原理(掌握)
- 3.5.3,通用定时器输入捕获实验配置步骤(掌握)
- 3.5.4,编程实战:通用定时器输入捕获实验(掌握)
- 3.6,通用定时器脉冲计数实验(掌握)
- 3.6.1,脉冲计数实验原理(熟悉)
- 3.6.2,通用定时器脉冲计数实验配置步骤(掌握)
- 3.6.3,编程实战:通用定时器脉冲计数实验(掌握)
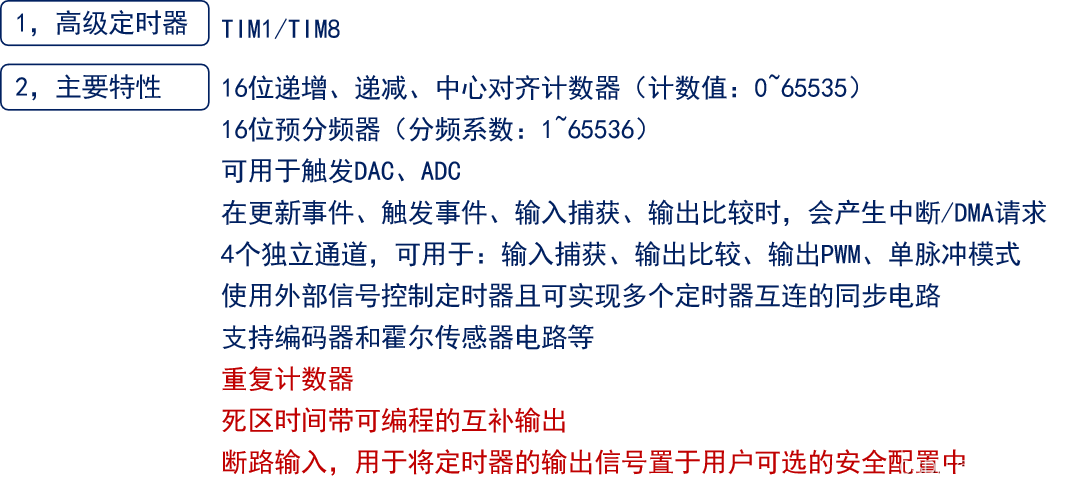
- 四、高级定时器(掌握)
- 4.1,高级定时器简介(了解)
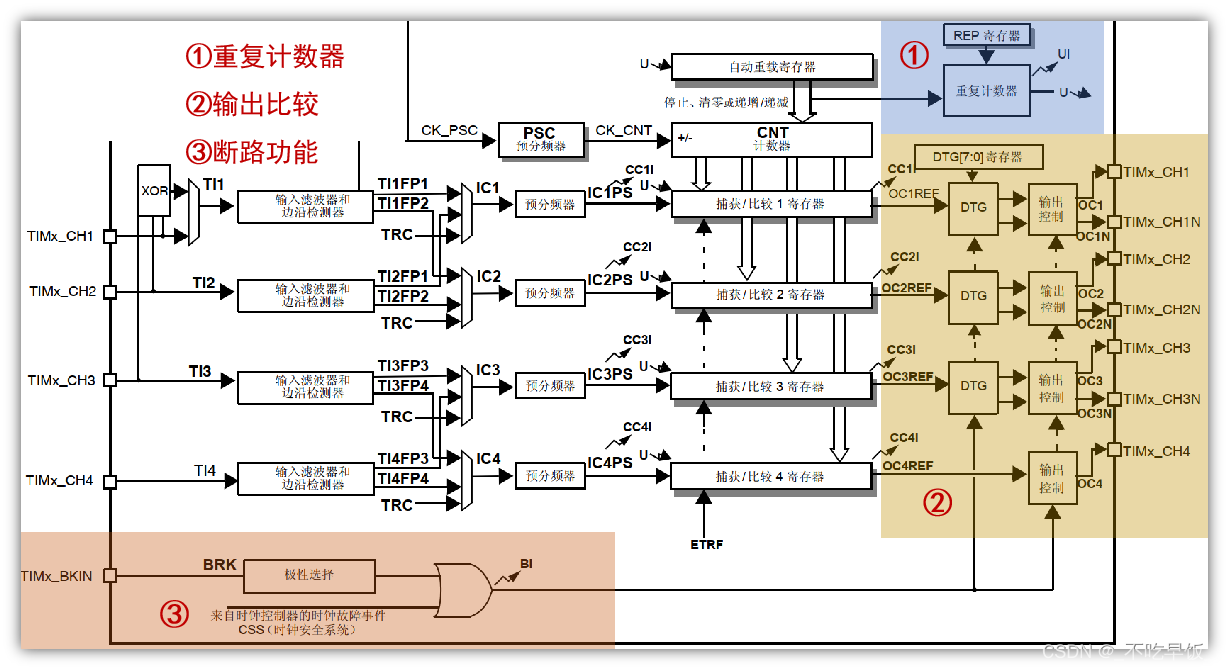
- 4.2,高级定时器框图(熟悉)
- 4.3,高级定时器输出指定个数PWM实验(掌握)
- 4.3.1,重复计数器特性(熟悉)
- 4.3.2,高级定时器输出指定个数PWM实验原理(掌握)
- 4.3.3,高级定时器输出指定个数PWM实验配置步骤(掌握)
- 4.3.4,编程实战:高级定时器输出指定个数PWM实验(掌握)
- 4.4,高级定时器输出比较模式实验(掌握)
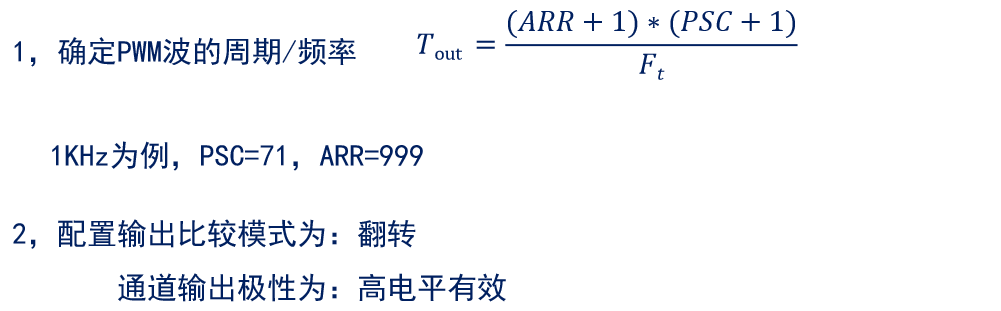
- 4.4.1,高级定时器输出比较模式实验原理(掌握)
- 4.4.2,高级定时器输出比较模式实验配置步骤(掌握)
- 4.4.3,编程实战:高级定时器输出比较模式实验(掌握)
- 4.5,高级定时器互补输出带死区控制实验(掌握)
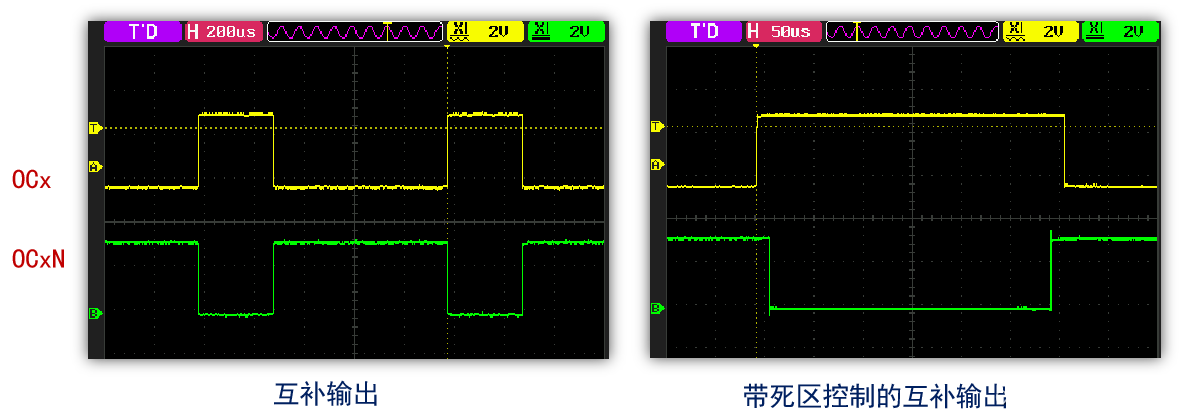
- 4.5.1,互补输出,还带死区控制,什么意思?(了解)
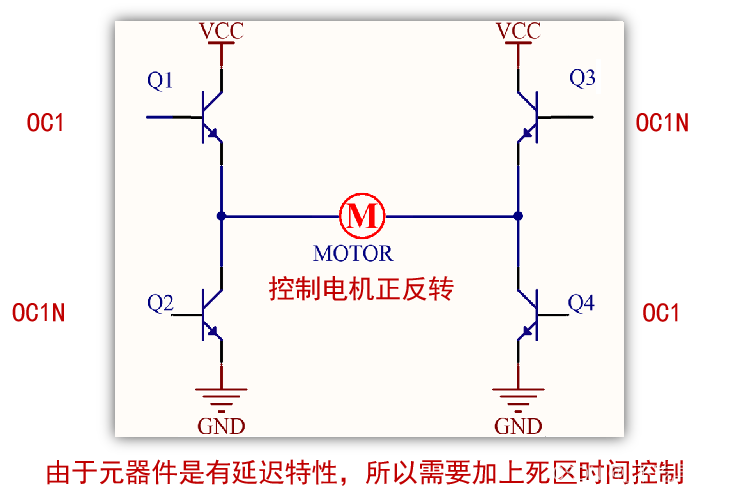
- 4.5.2,带死区控制的互补输出应用之H桥(了解)
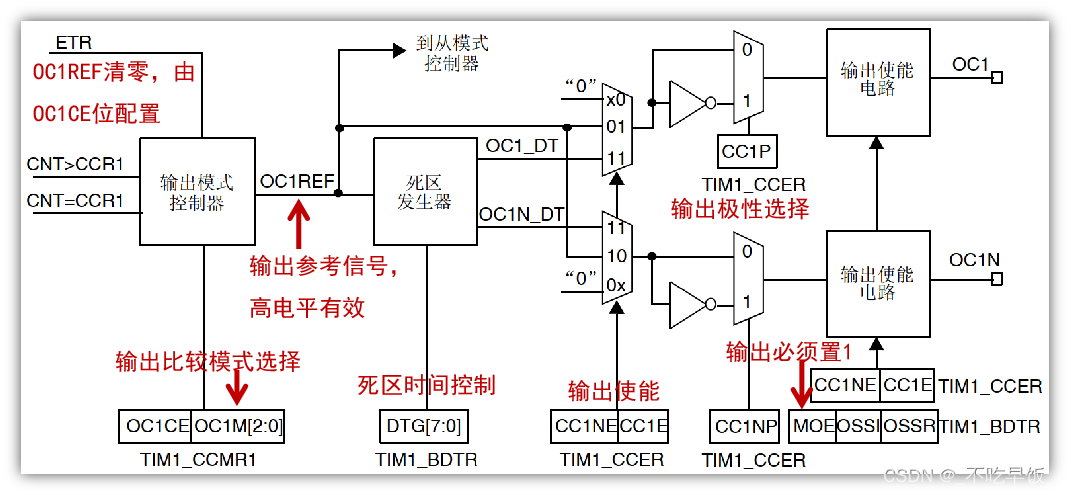
- 4.5.3,捕获/比较通道的输出部分(通道1至3)(熟悉)
- 4.5.4,死区时间计算(掌握)
- 4.5.5,刹车(断路)功能(熟悉)
- 4.5.6,高级定时器互补输出带死区控制实验配置步骤(掌握)
- 4.5.7,编程实战:高级定时器互补输出带死区控制实验(掌握)
- 4.6,高级定时器PWM输入模式实验(掌握)
- 4.6.1,PWM输入模式工作原理(熟悉)
- 4.6.2,PWM输入模式时序(熟悉)
- 4.6.3,高级定时器PWM输入模式实验配置步骤(掌握)
- 4.6.4,编程实战:高级定时器PWM输入模式实验(掌握)
一、定时器概述(了解)
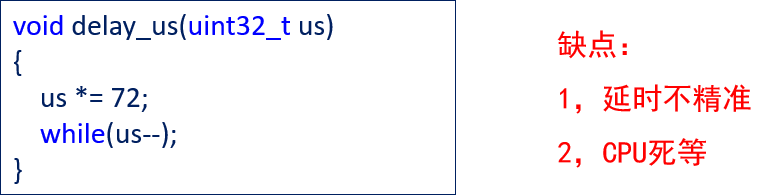
1.1,软件定时原理
使用纯软件(CPU死等)的方式实现定时(延时)功能
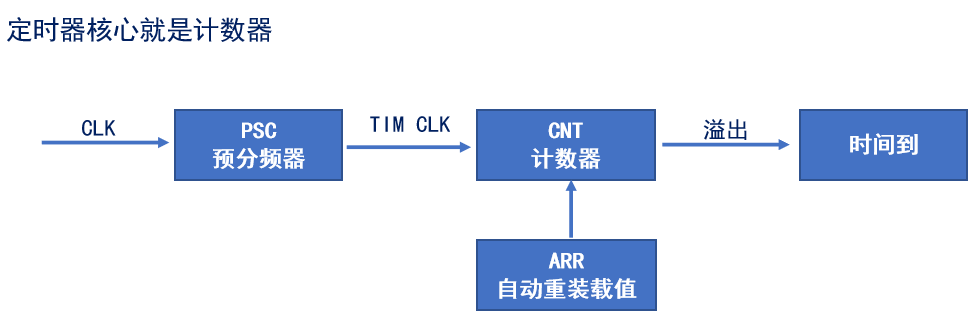
1.2,定时器定时原理
使用精准的时基,通过硬件的方式,实现定时功能
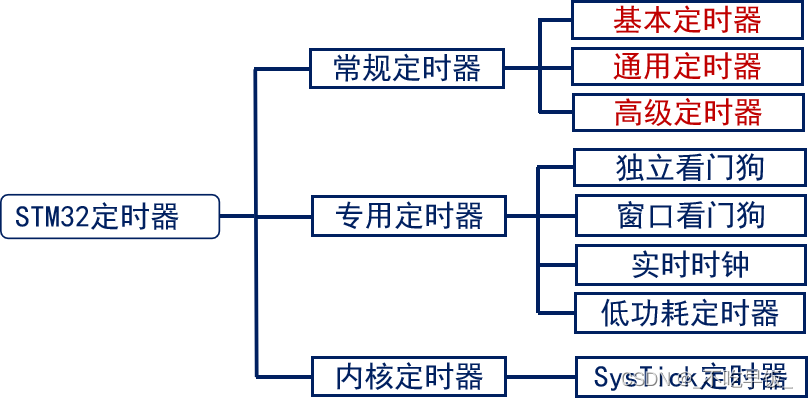
1.3,STM32定时器分类
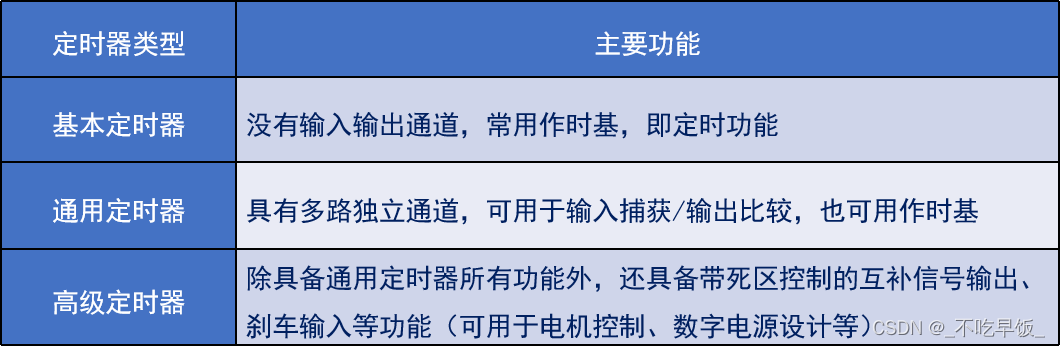
1.4,STM32定时器特性表

1.5,STM32基本、通用、高级定时器的功能整体区别
二、基本定时器(掌握)
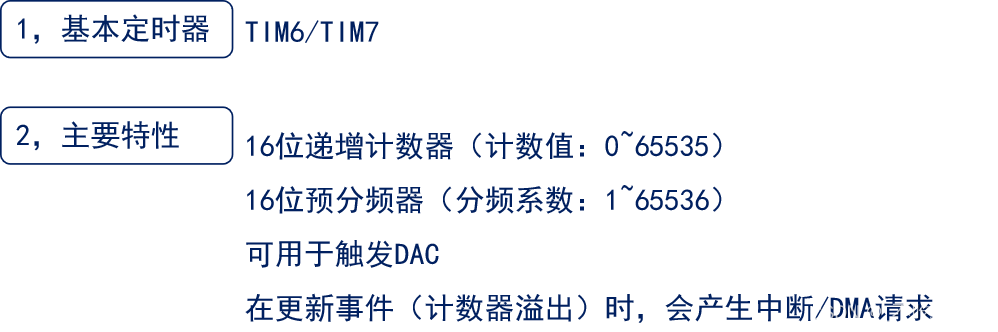
2.1,基本定时器简介(了解)
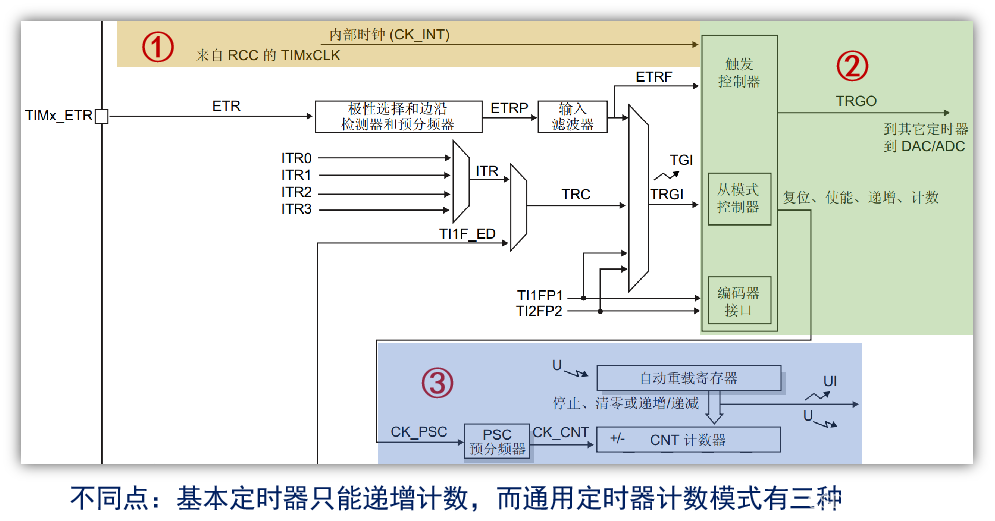
2.2,基本定时器框图(熟悉)
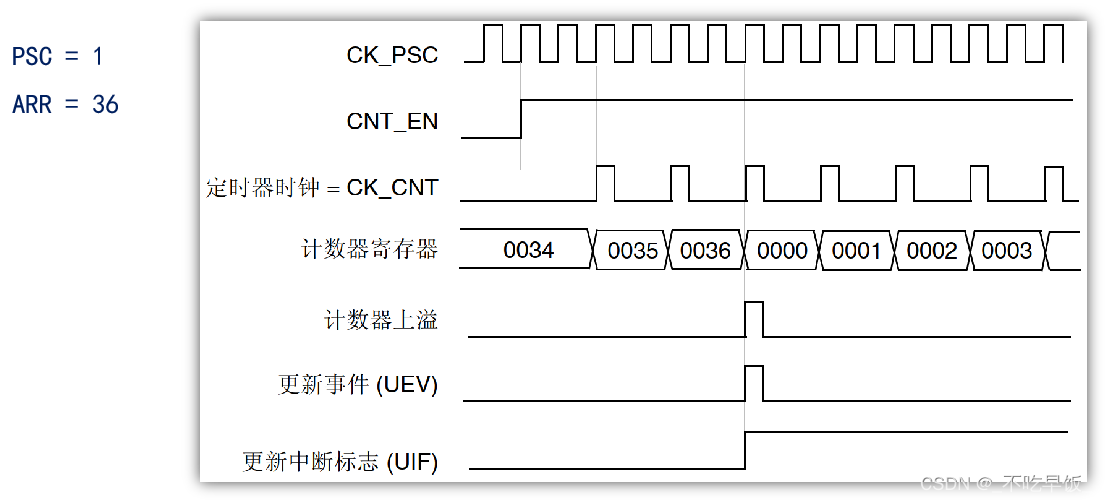
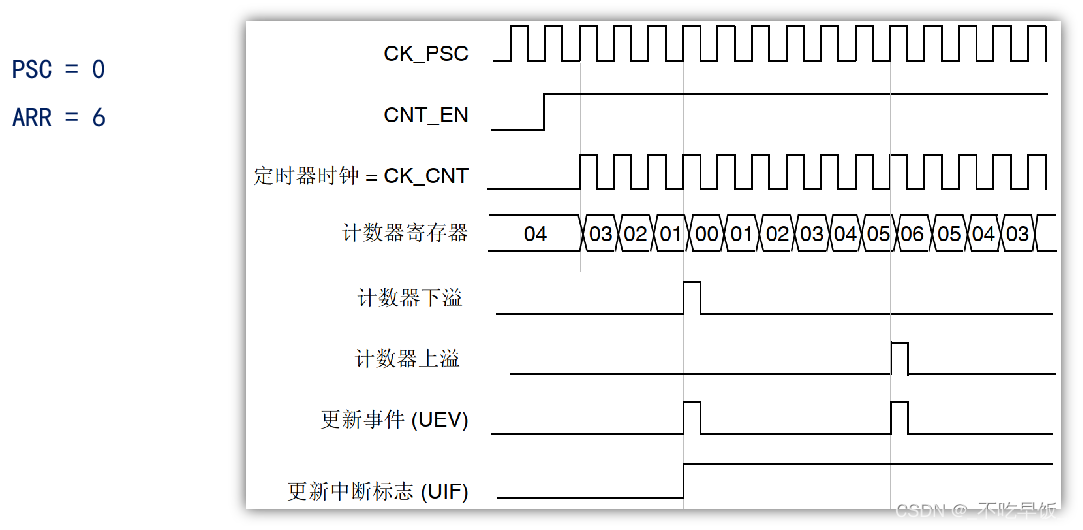
2.3,定时器计数模式及溢出条件(熟悉)
递增计数模式实例说明
中心对齐模式实例说明
2.4,定时器中断实验相关寄存器(了解)
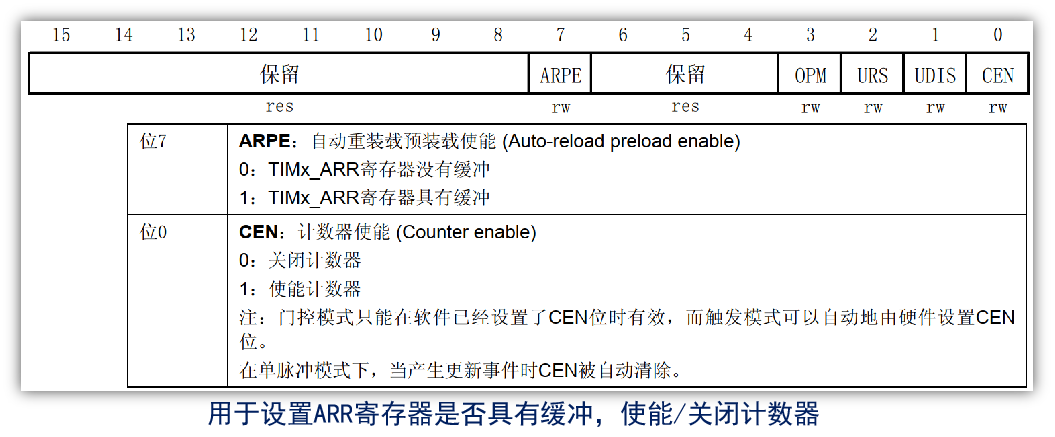
TIM6 和TIM7 控制寄存器 1(TIMx_CR1)
TIM6 和TIM7 DMA/中断使能寄存器(TIMx_DIER)
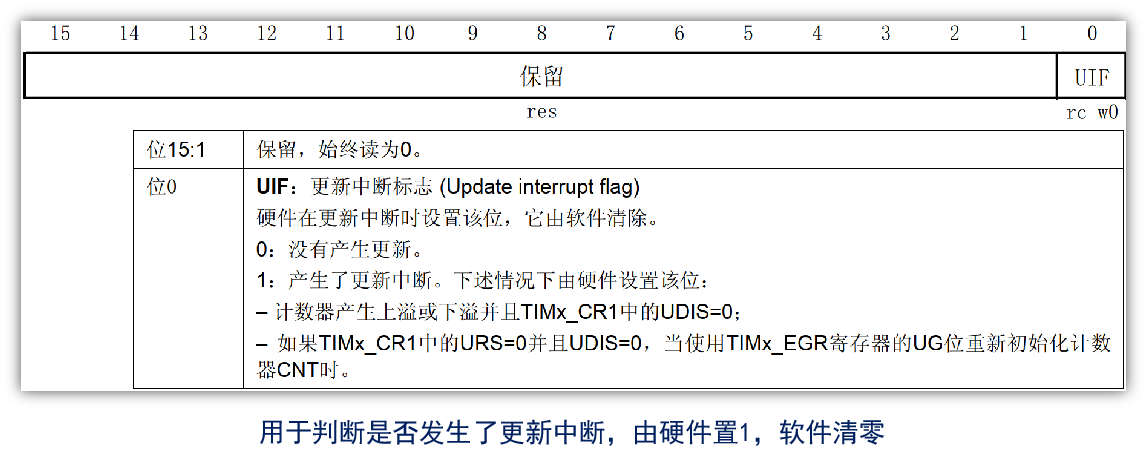
 TIM6 和TIM7 状态寄存器(TIMx_SR)
TIM6 和TIM7 状态寄存器(TIMx_SR)
TIM6 和TIM7 计数器(TIMx_CNT)

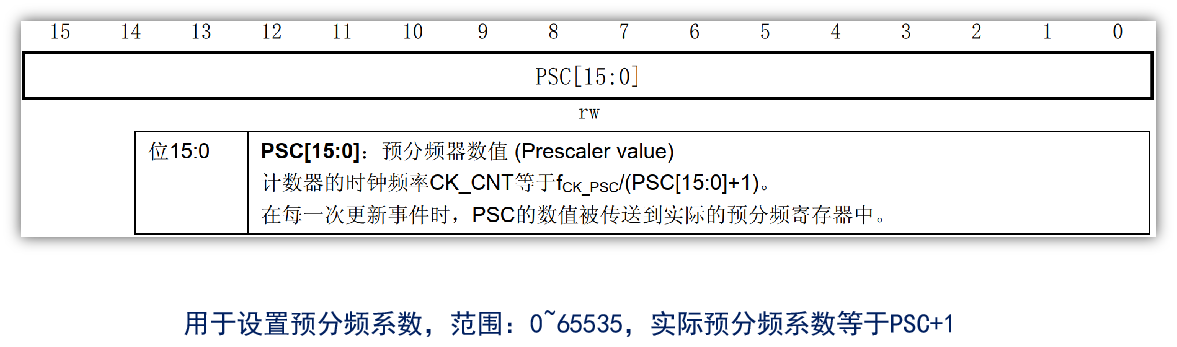
TIM6 和TIM7 预分频器(TIMx_PSC)
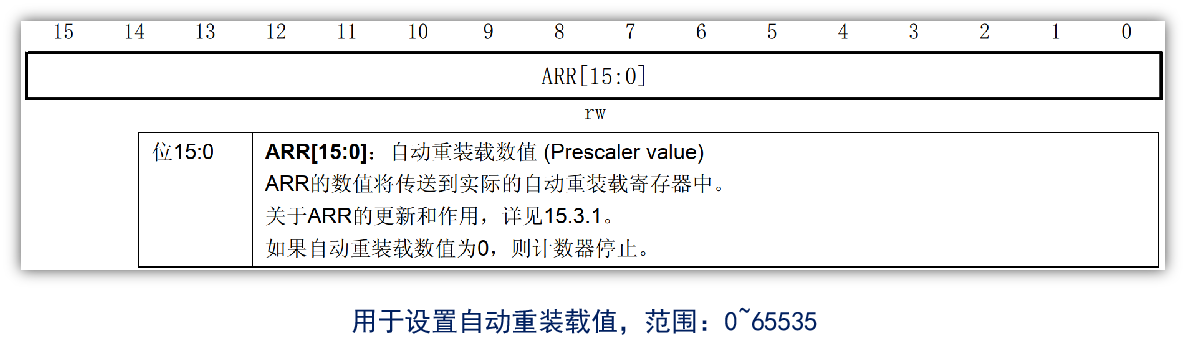
TIM6 和TIM7 自动重装载寄存器(TIMx_ARR)
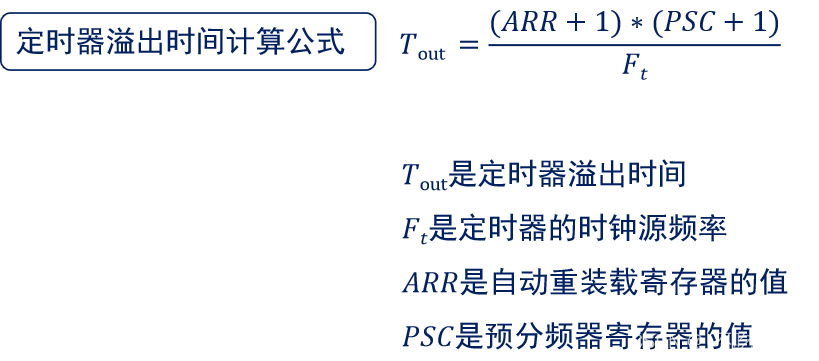
2.5,定时器溢出时间计算方法(掌握)
2.6,定时器中断实验配置步骤(掌握)

HAL_TIM_Base_Init()

HAL_TIM_Base_MspInit() //配置NVIC、CLOCK等

HAL_TIM_Base_Start_IT()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()
相关HAL库函数介绍

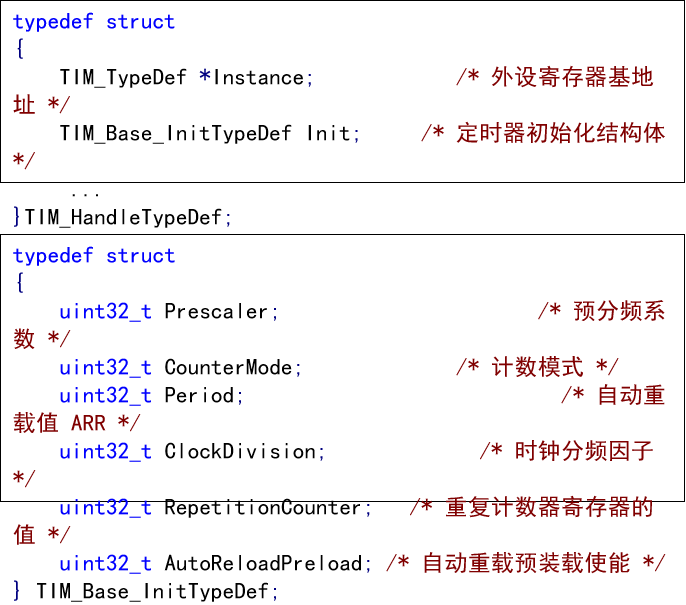
关键结构体介绍
2.7,编程实战:定时器中断实验(掌握)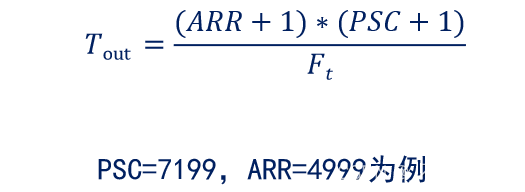
btim.c
#include "./BSP/LED/led.h"
#include "./BSP/TIMER/btim.h"
TIM_HandleTypeDef g_timx_handle; /* 定时器句柄 */
/**
* @brief 基本定时器TIMX定时中断初始化函数
* @note
* 基本定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候
* 基本定时器的时钟为APB1时钟的2倍, 而APB1为36M, 所以定时器时钟 = 72Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft=定时器工作频率,单位:Mhz
*
* @param arr: 自动重装值。
* @param psc: 时钟预分频数
* @retval 无
*/
void btim_timx_int_init(uint16_t arr, uint16_t psc)
{
g_timx_handle.Instance = BTIM_TIMX_INT; /* 通用定时器X */
g_timx_handle.Init.Prescaler = psc; /* 设置预分频系数 */
g_timx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */
g_timx_handle.Init.Period = arr; /* 自动装载值 */
HAL_TIM_Base_Init(&g_timx_handle);
HAL_TIM_Base_Start_IT(&g_timx_handle); /* 使能定时器x及其更新中断 */
}
/**
* @brief 定时器底层驱动,开启时钟,设置中断优先级
此函数会被HAL_TIM_Base_Init()函数调用
* @param htim:定时器句柄
* @retval 无
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == BTIM_TIMX_INT)
{
BTIM_TIMX_INT_CLK_ENABLE(); /* 使能TIM时钟 */
HAL_NVIC_SetPriority(BTIM_TIMX_INT_IRQn, 1, 3); /* 抢占1,子优先级3,组2 */
HAL_NVIC_EnableIRQ(BTIM_TIMX_INT_IRQn); /* 开启ITM3中断 */
}
}
/**
* @brief 定时器TIMX中断服务函数
* @param 无
* @retval 无
*/
void BTIM_TIMX_INT_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_handle); /* 定时器中断公共处理函数 */
}
/**
* @brief 定时器更新中断回调函数
* @param htim:定时器句柄
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == BTIM_TIMX_INT)
{
LED1_TOGGLE(); /* LED1反转 */
}
}
btim.h
#ifndef __BTIM_H
#define __BTIM_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 基本定时器 定义 */
/* TIMX 中断定义
* 默认是针对TIM6/TIM7
* 注意: 通过修改这4个宏定义,可以支持TIM1~TIM8任意一个定时器.
*/
#define BTIM_TIMX_INT TIM6
#define BTIM_TIMX_INT_IRQn TIM6_DAC_IRQn
#define BTIM_TIMX_INT_IRQHandler TIM6_DAC_IRQHandler
#define BTIM_TIMX_INT_CLK_ENABLE() do{ __HAL_RCC_TIM6_CLK_ENABLE(); }while(0) /* TIM6 时钟使能 */
/******************************************************************************************/
void btim_timx_int_init(uint16_t arr, uint16_t psc); /* 基本定时器 定时中断初始化函数 */
#endif
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/TIMER/btim.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
btim_timx_int_init(5000 - 1, 7200 - 1); /* 10Khz的计数频率,计数5K次为500ms */
while (1)
{
LED0_TOGGLE();
delay_ms(200);
}
}
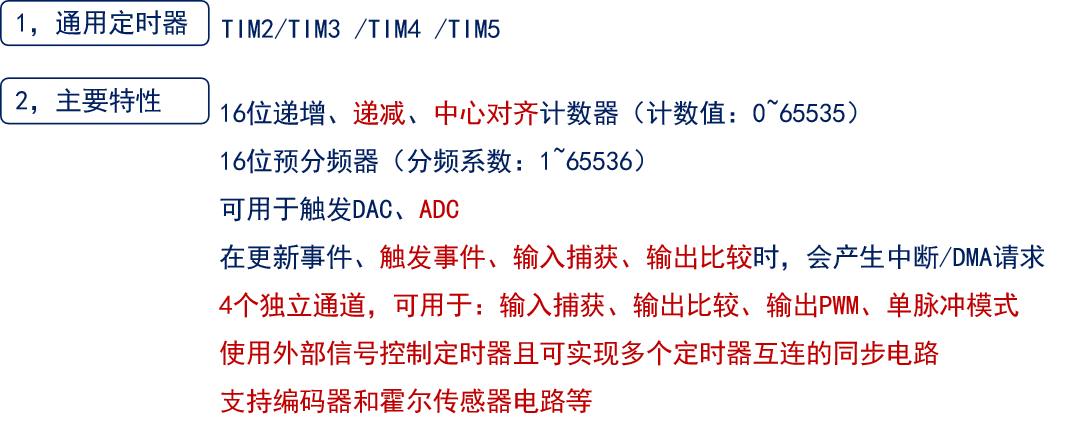
三、通用定时器(掌握)
3.1,通用定时器简介(了解)
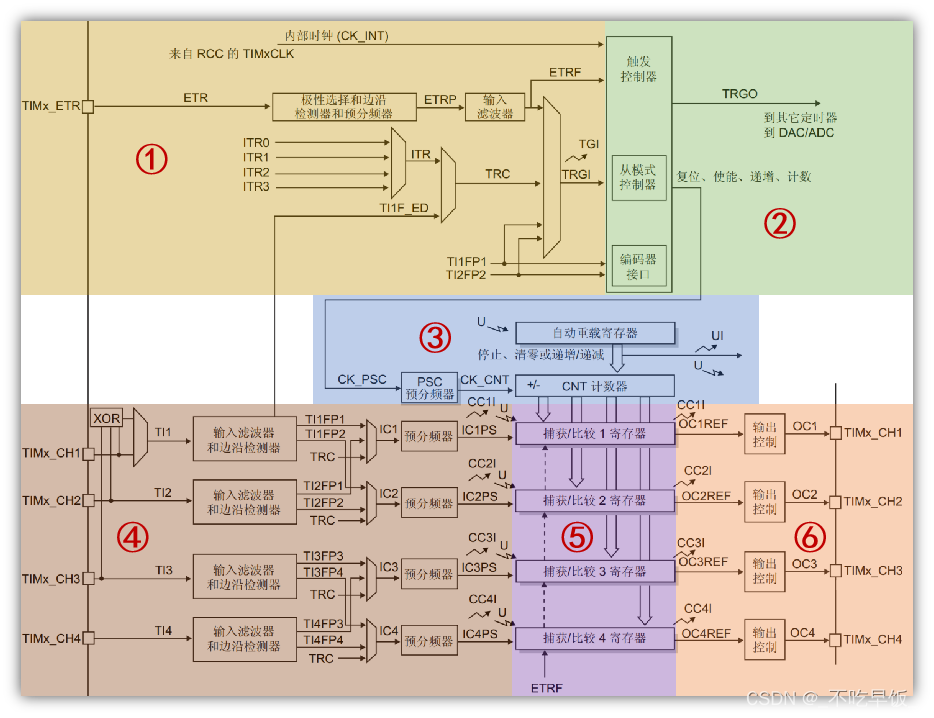
3.2,通用定时器框图(熟悉)

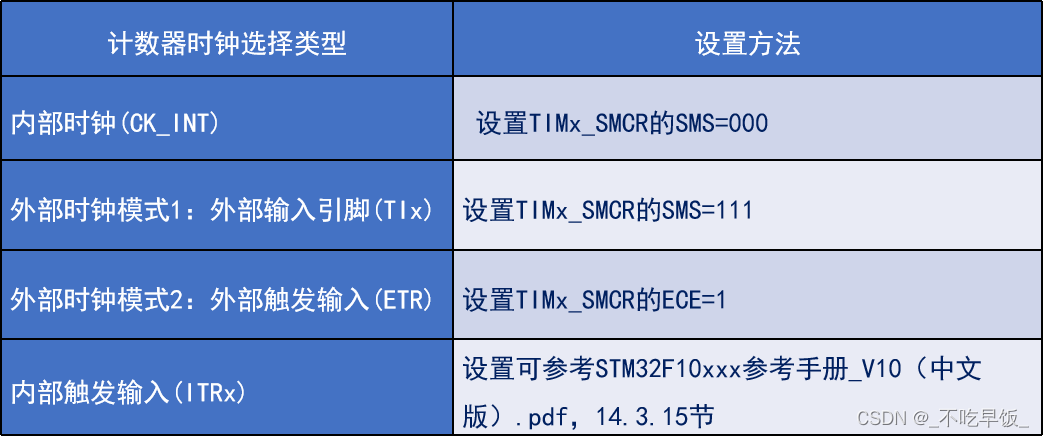
3.3,计数器时钟源(掌握)

计数器时钟源寄存器设置方法(F1为例)
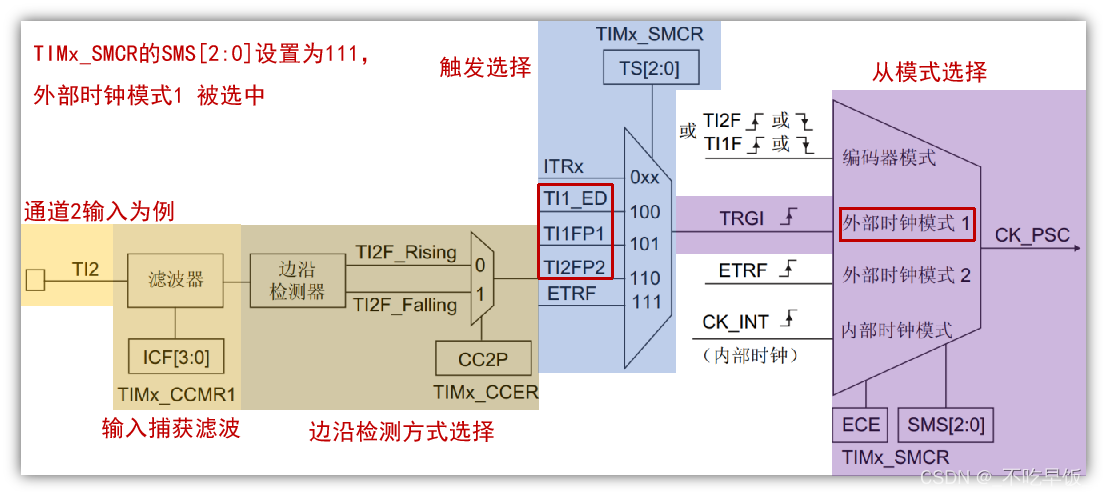
外部时钟模式1
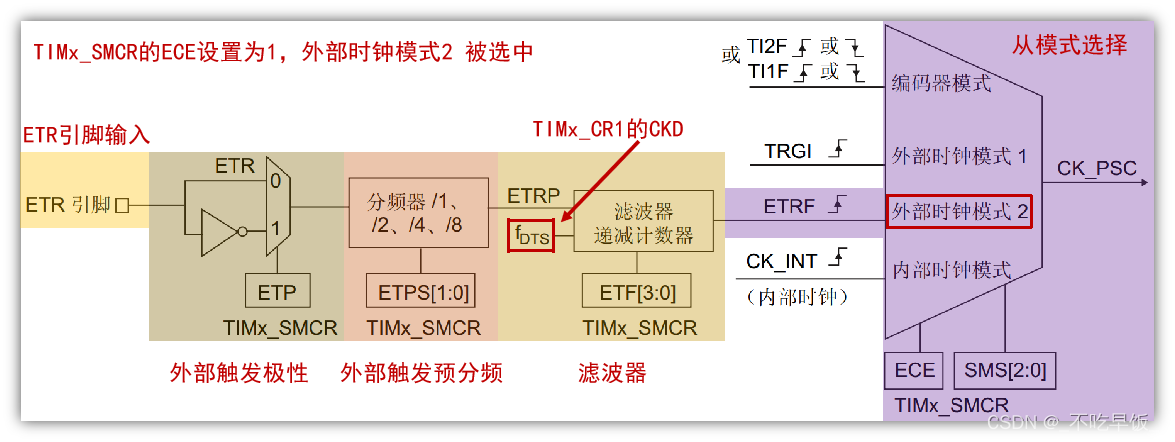
外部时钟模式2
使用一个定时器作为另一个定时器的预分频器(F1为例)
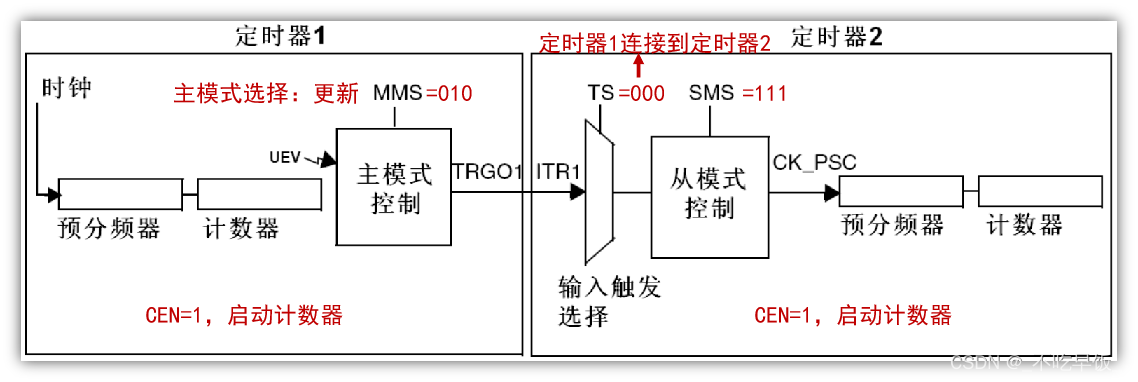
解读通用定时器中断实验
3.4,通用定时器PWM输出实验(掌握)
3.4.1,通用定时器输出比较部分框图介绍(熟悉)
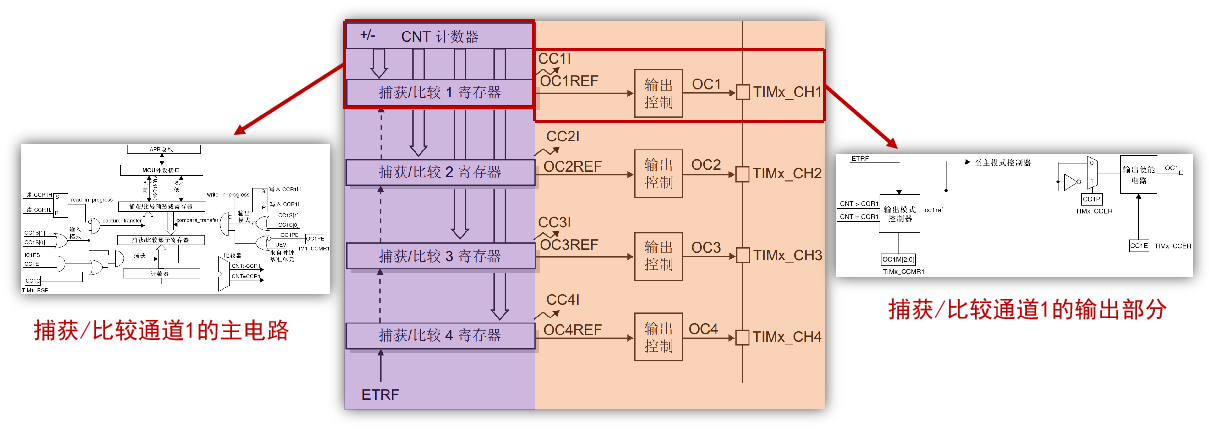
捕获/比较通道1的主电路—输出部分

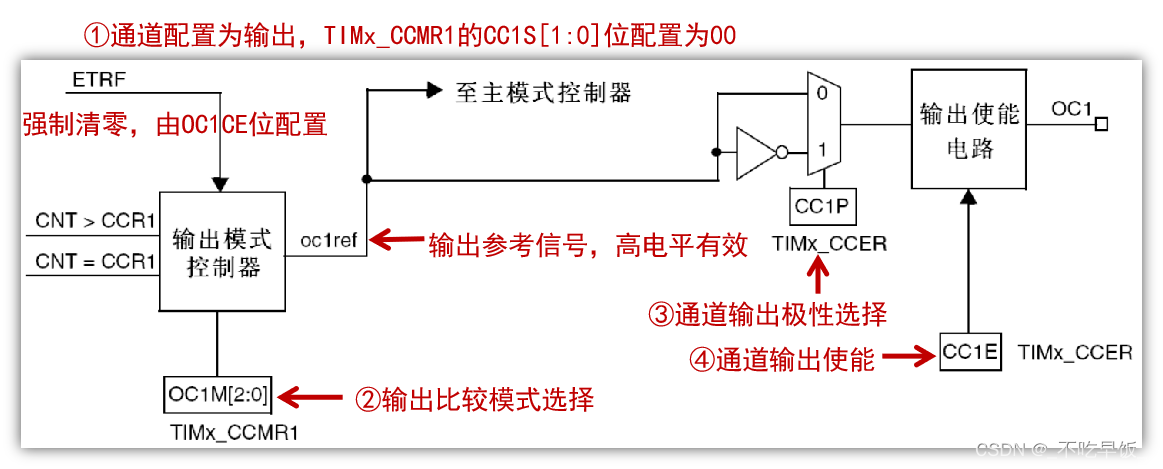
捕获/比较通道的输出部分(通道1)
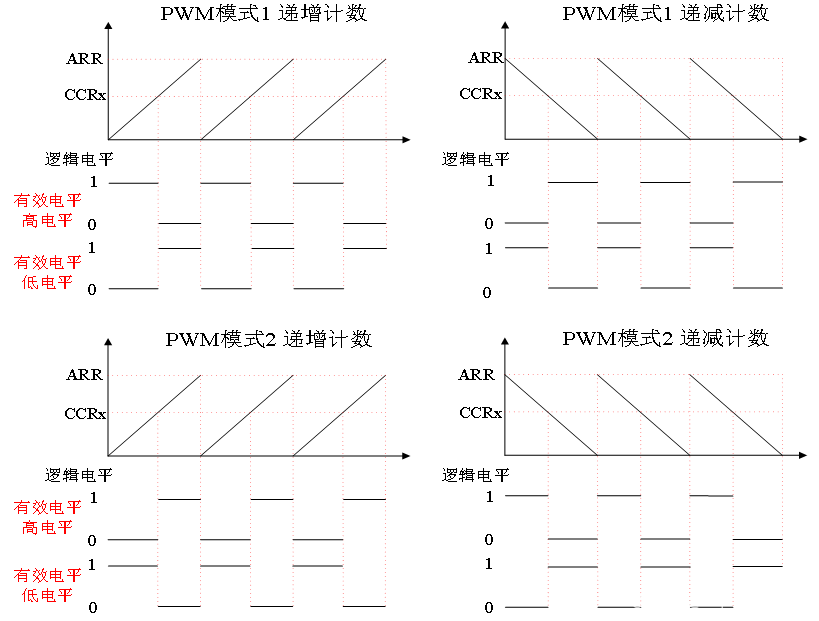
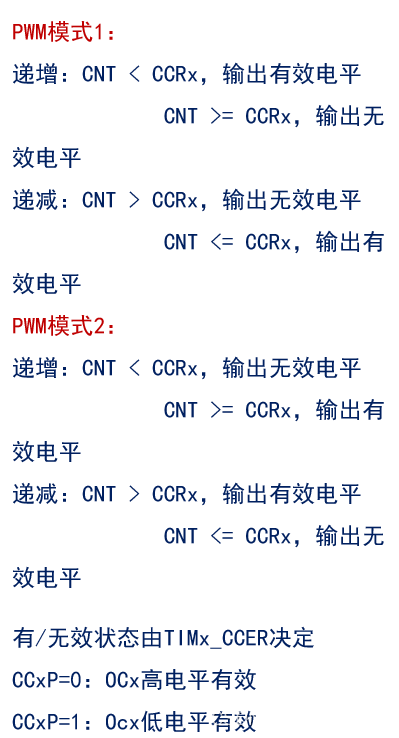
3.4.2,通用定时器输出PWM原理(掌握)
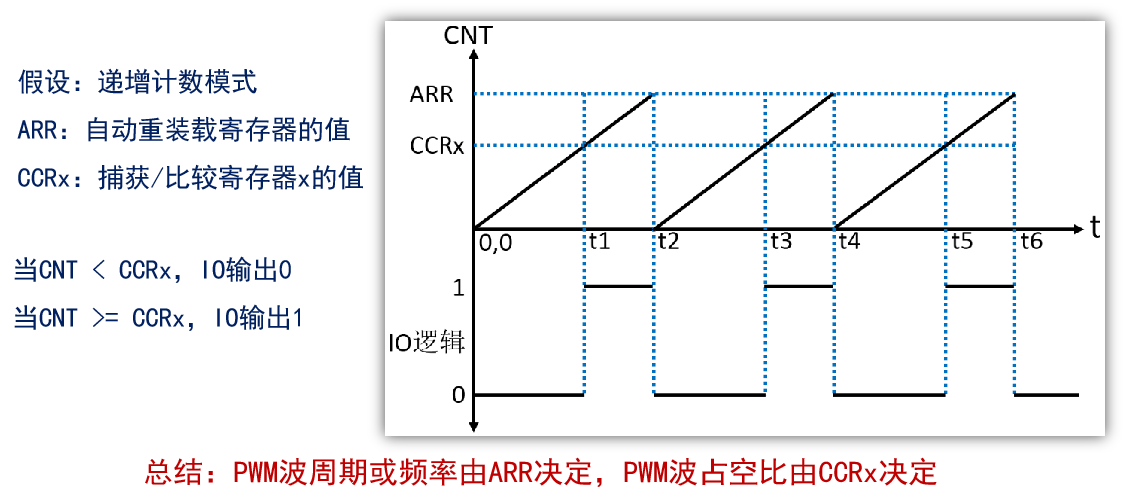
3.4.3,PWM模式(熟悉)
3.4.4,通用定时器PWM输出实验配置步骤(掌握)

HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_TIM_PWM_Start()

__HAL_TIM_SET_COMPARE()

__HAL_TIM_ENABLE_OCxPRELOAD()
相关HAL库函数介绍

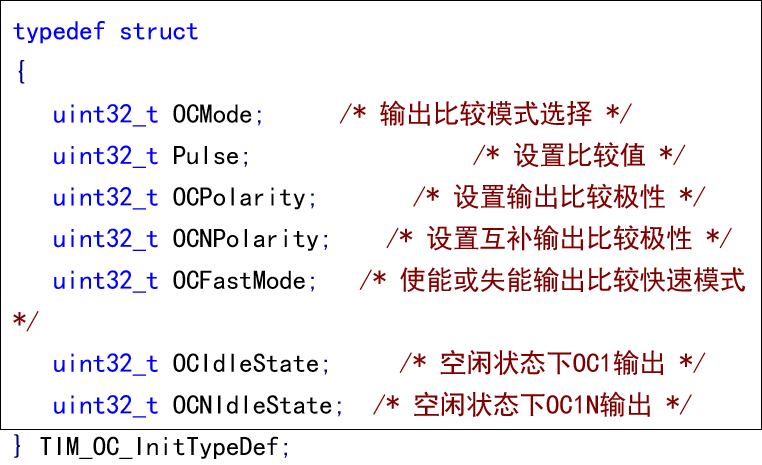
关键结构体介绍
3.4.5,编程实战:通用定时器PWM输出实验(掌握)
3.5,通用定时器输入捕获实验(掌握)
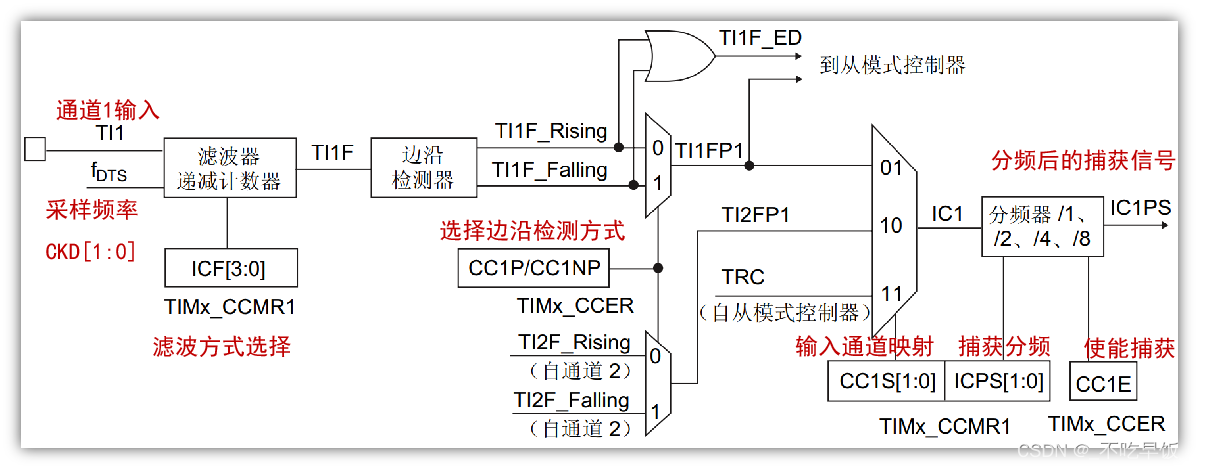
3.5.1,通用定时器输入捕获部分框图介绍(熟悉)
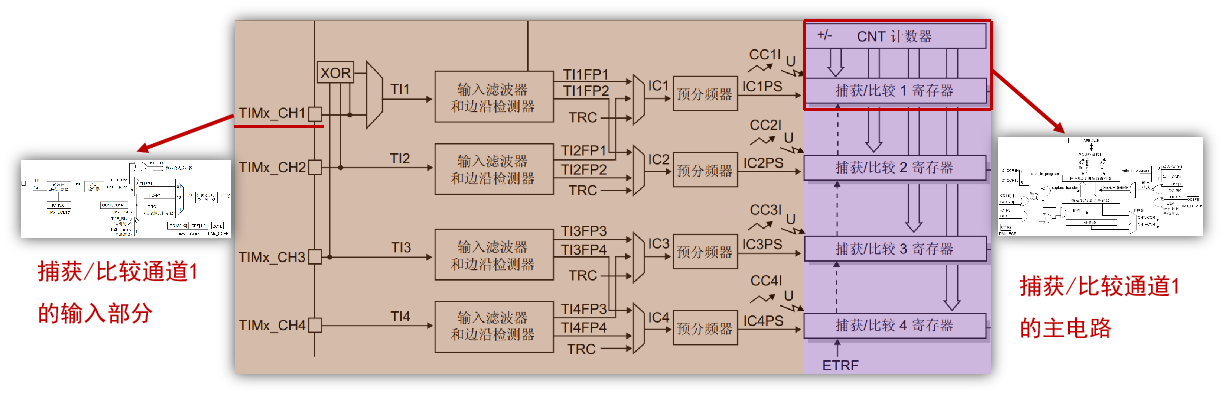
捕获/比较通道的输入部分(通道1)
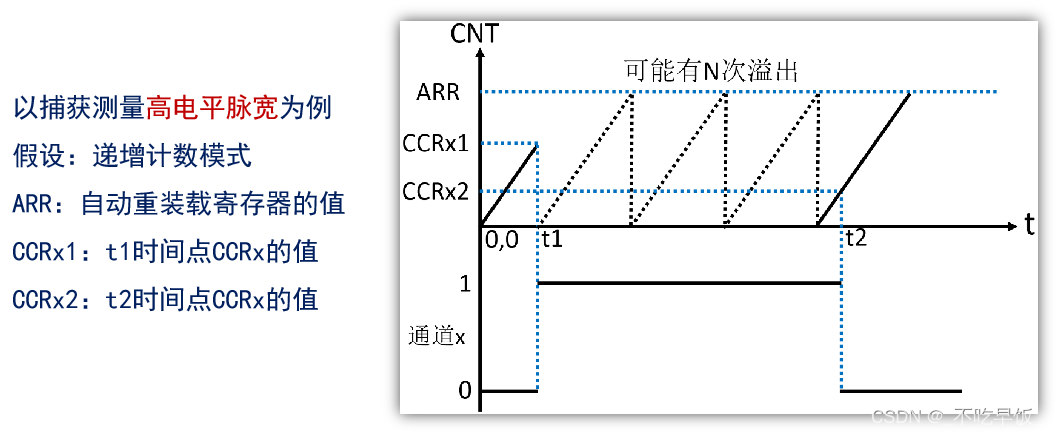
3.5.2,通用定时器输入捕获脉宽测量原理(掌握)
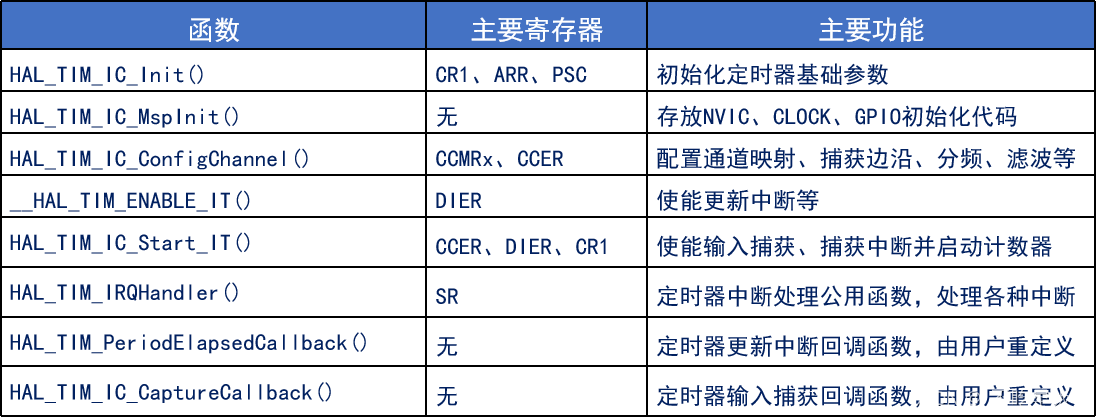
3.5.3,通用定时器输入捕获实验配置步骤(掌握)

HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_IC_ConfigChannel()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

__HAL_TIM_ENABLE_IT()

HAL_TIM_IC_Start_IT()

TIMx_IRQHandler()等、 HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()、HAL_TIM_IC_CaptureCallback()
相关HAL库函数介绍
关键结构体介绍
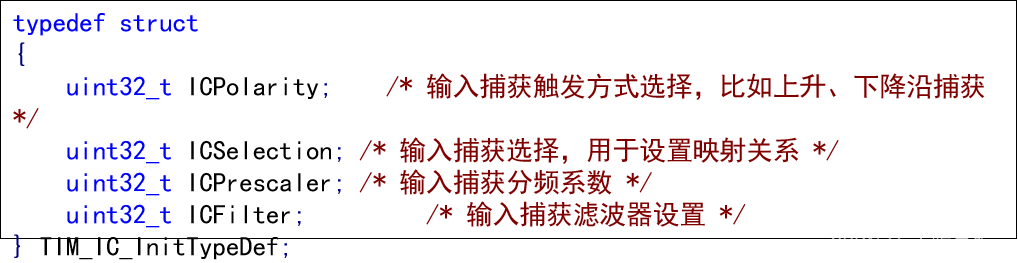
3.5.4,编程实战:通用定时器输入捕获实验(掌握)
通过定时器5通道1来捕获按键高电平脉宽时间,通过串口打印出来
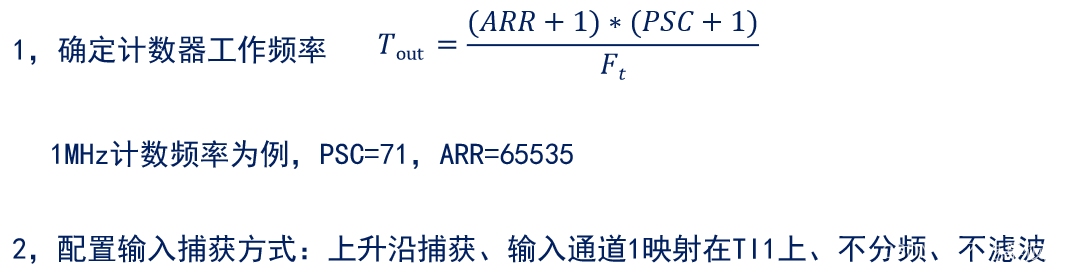
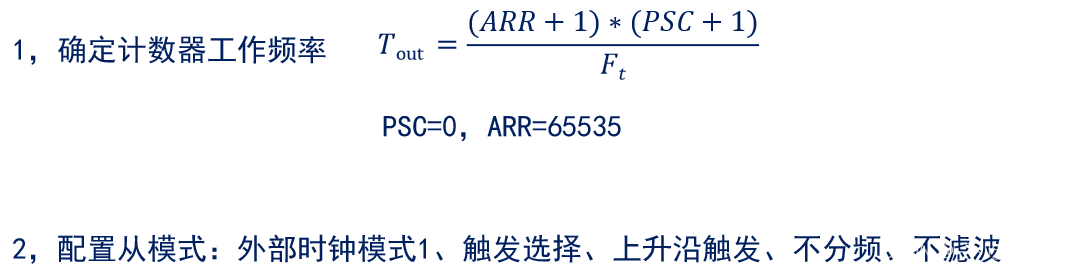
3.6,通用定时器脉冲计数实验(掌握)
3.6.1,脉冲计数实验原理(熟悉)
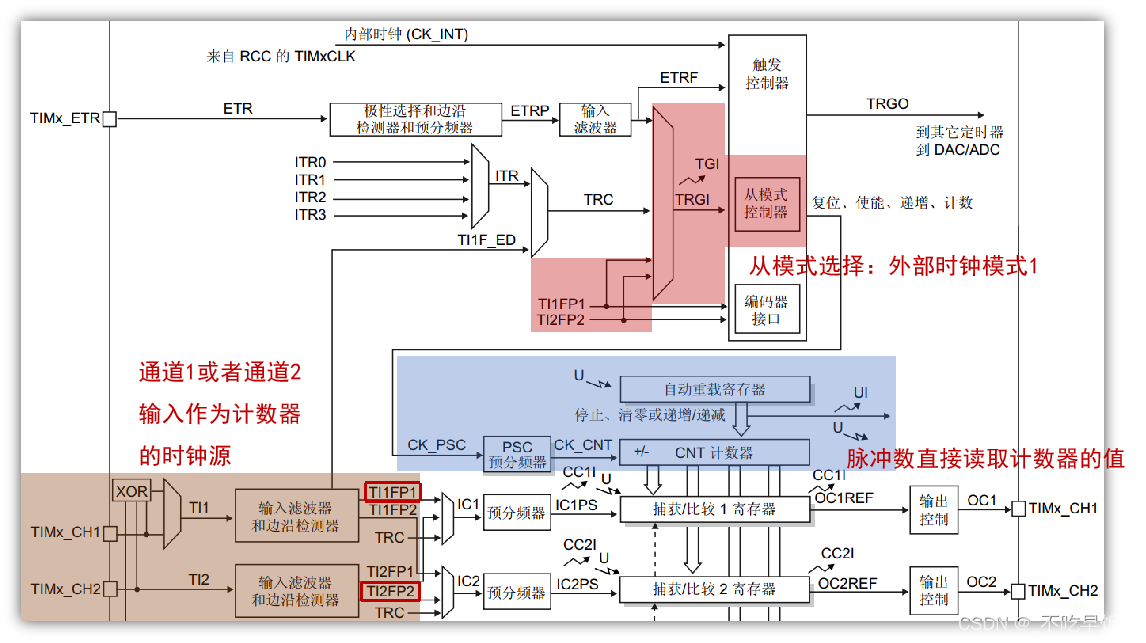
外部时钟模式1

3.6.2,通用定时器脉冲计数实验配置步骤(掌握)

HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

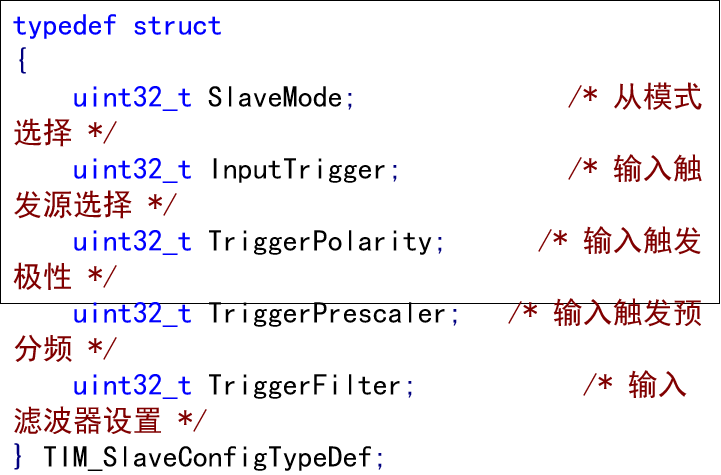
HAL_TIM_SlaveConfigSynchro()

HAL_TIM_IC_Start()

__HAL_TIM_GET_COUNTER()

__HAL_TIM_SET_COUNTER()
相关HAL库函数介绍

关键结构体介绍
3.6.3,编程实战:通用定时器脉冲计数实验(掌握)
将定时器2通道1输入的高电平脉冲作为定时器2的时钟,并通过串口打印脉冲数
四、高级定时器(掌握)
4.1,高级定时器简介(了解)
4.2,高级定时器框图(熟悉)
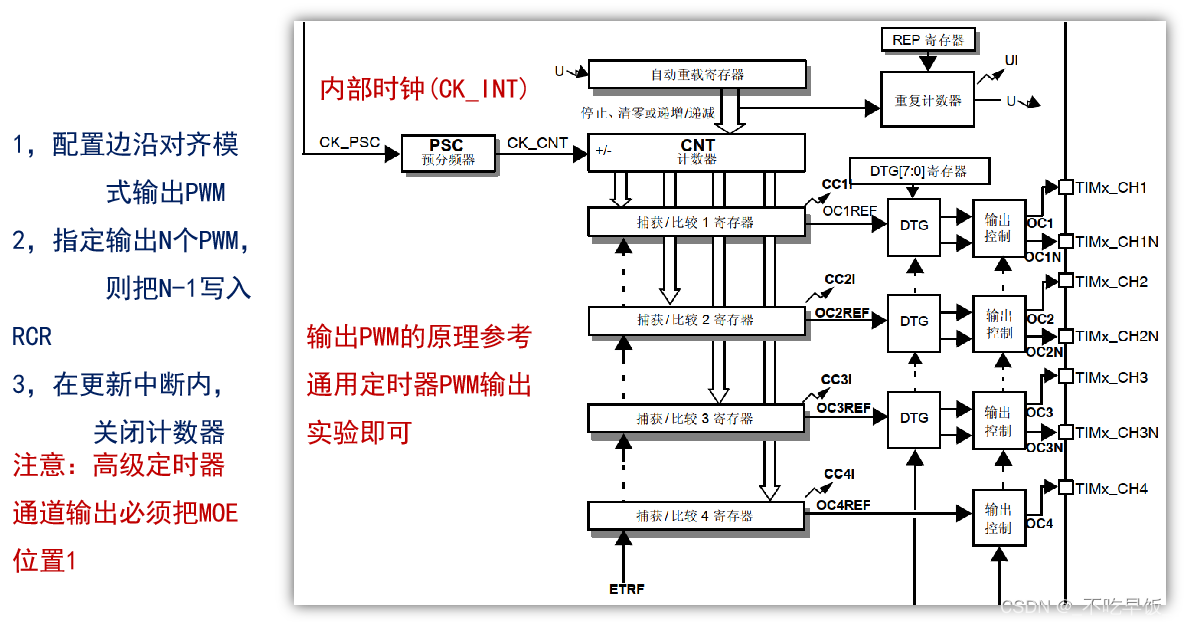
4.3,高级定时器输出指定个数PWM实验(掌握)
4.3.1,重复计数器特性(熟悉)
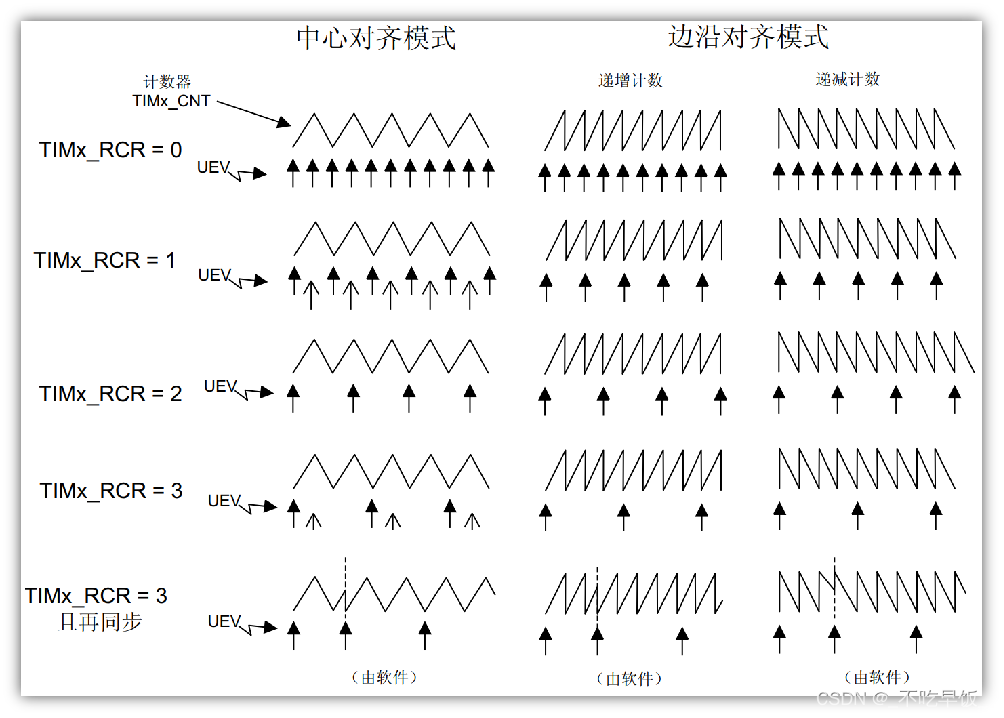
计数器每次上溢或下溢都能使重复计数器减1,减到0时,再发生一次溢出就会产生更新事件
如果设置RCR为N,
更新事件将在N+1
次溢出时发生
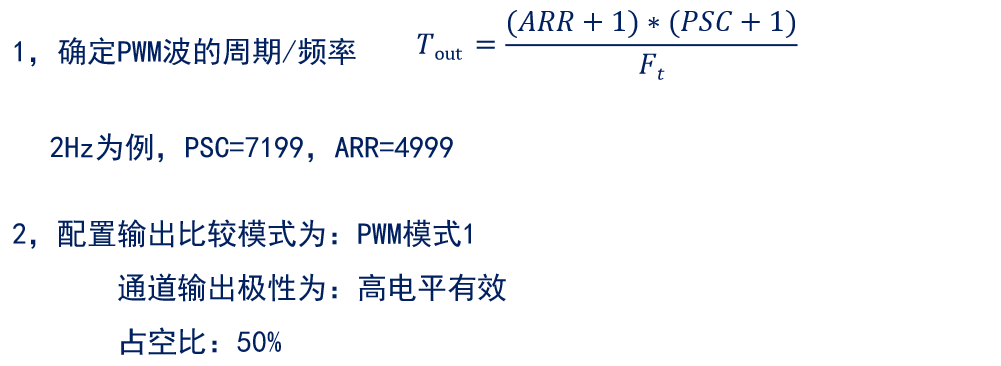
4.3.2,高级定时器输出指定个数PWM实验原理(掌握)
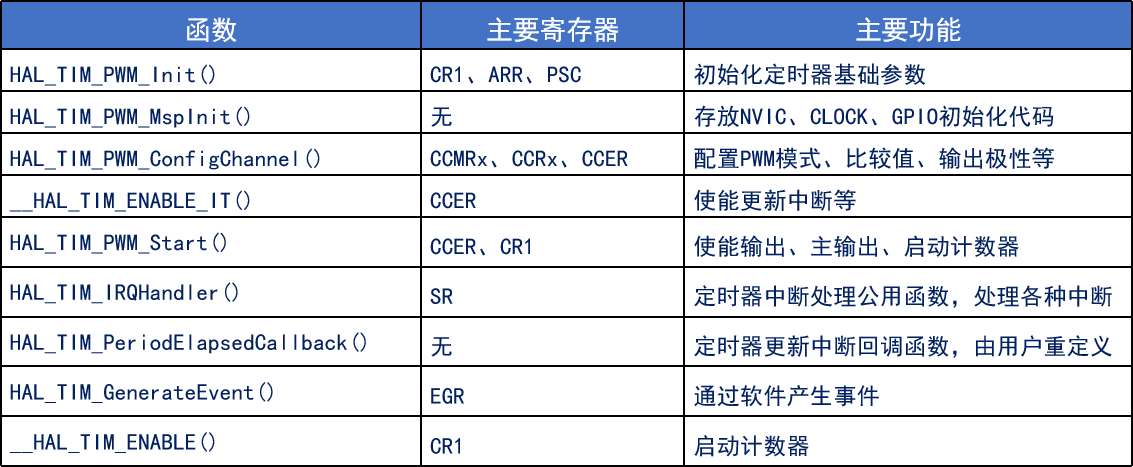
4.3.3,高级定时器输出指定个数PWM实验配置步骤(掌握)

HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

__HAL_TIM_ENABLE_IT()

HAL_TIM_PWM_Start()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()
相关HAL库函数介绍
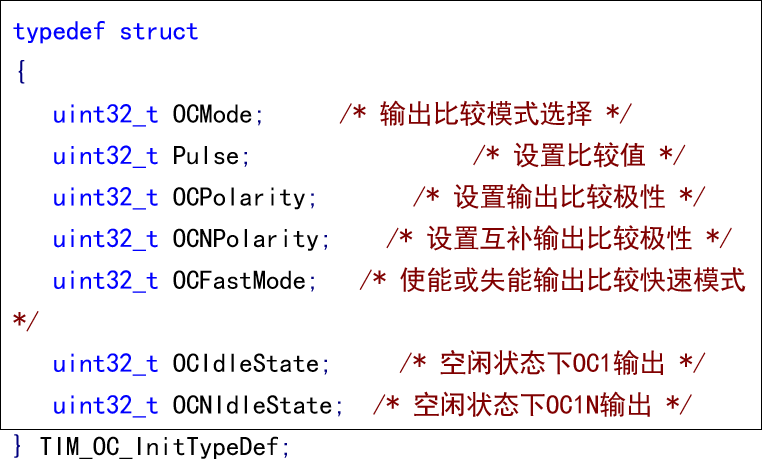
关键结构体介绍
4.3.4,编程实战:高级定时器输出指定个数PWM实验(掌握)
通过定时器8通道1实现指定个数PWM输出,用于控制LED1的亮灭
4.4,高级定时器输出比较模式实验(掌握)
4.4.1,高级定时器输出比较模式实验原理(掌握)

4.4.2,高级定时器输出比较模式实验配置步骤(掌握)

HAL_TIM_OC_Init()

HAL_TIM_OC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_OC_ConfigChannel()

__HAL_TIM_ENABLE_OCxPRELOAD()

HAL_TIM_OC_Start()

__HAL_TIM_SET_COMPARE()
相关HAL库函数介绍

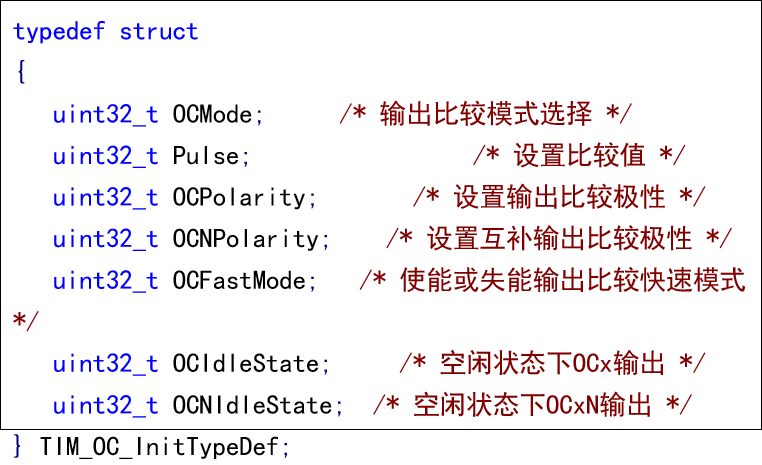
关键结构体介绍

4.4.3,编程实战:高级定时器输出比较模式实验(掌握)
通过定时器8通道1/2/3/4输出相位分别为25%、50%、75%、100%的PWM
4.5,高级定时器互补输出带死区控制实验(掌握)
4.5.1,互补输出,还带死区控制,什么意思?(了解)
4.5.2,带死区控制的互补输出应用之H桥(了解)
4.5.3,捕获/比较通道的输出部分(通道1至3)(熟悉)
4.5.4,死区时间计算(掌握)
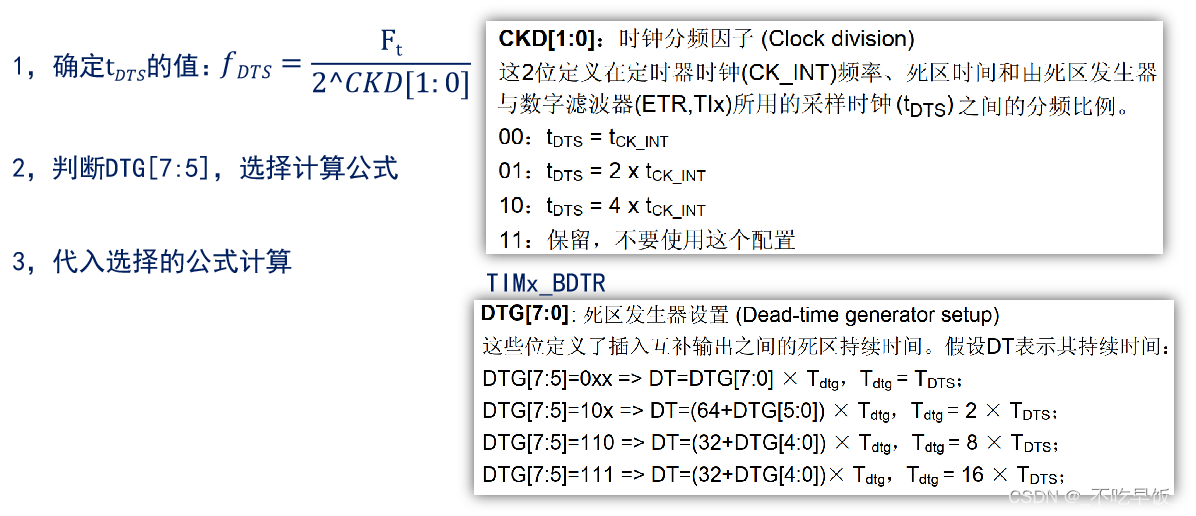
举个栗子(F1为例):DTG[7:0]=250
250,即二进制:1111 1010,选第四条
DT = (32+26)1655.56 ns=51.55968us
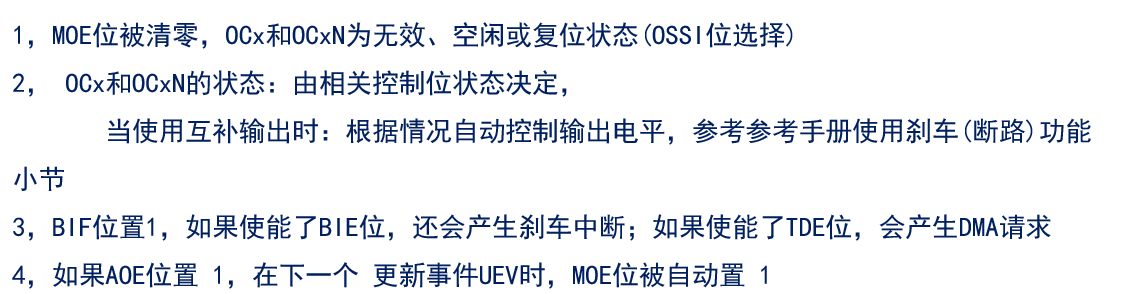
4.5.5,刹车(断路)功能(熟悉)

发生刹车后,会怎么样?
4.5.6,高级定时器互补输出带死区控制实验配置步骤(掌握)

HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_TIMEx_ConfigBreakDeadTime()

HAL_TIM_PWM_Start()

HAL_TIMEx_PWMN_Start()
相关HAL库函数介绍

关键结构体介绍
4.5.7,编程实战:高级定时器互补输出带死区控制实验(掌握)
通过定时器1通道1输出频率为1KHz,占空比为70%的PWM,使用PWM模式1
使能互补输出并设置死区时间控制:设置DTG为100(5.56us),进行验证死区时间是否正确
使能刹车功能:刹车输入信号高电平有效,配置输出空闲状态等,最后用示波器验证

4.6,高级定时器PWM输入模式实验(掌握)
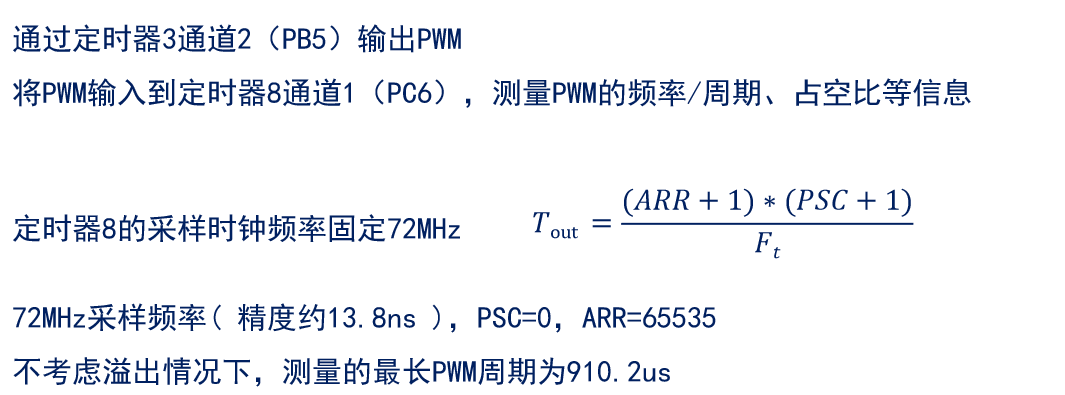
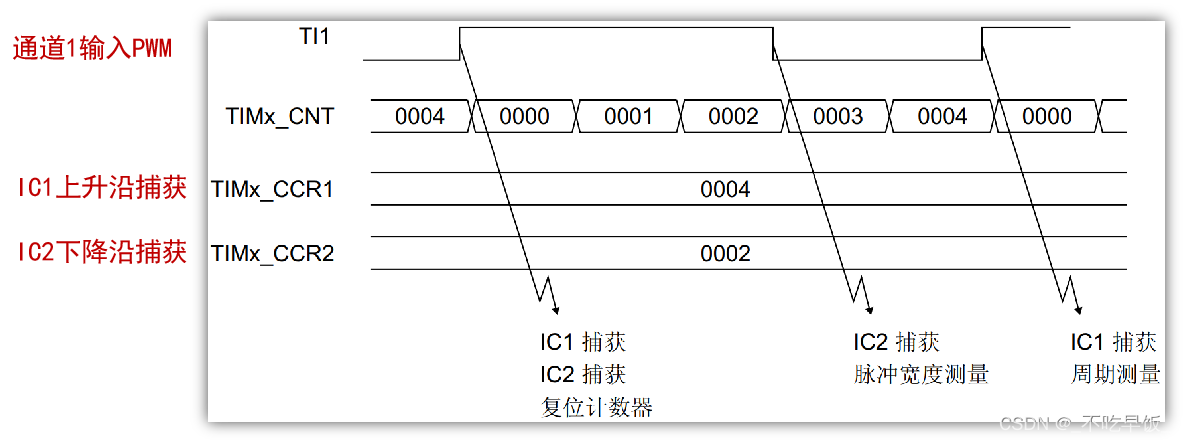
4.6.1,PWM输入模式工作原理(熟悉)
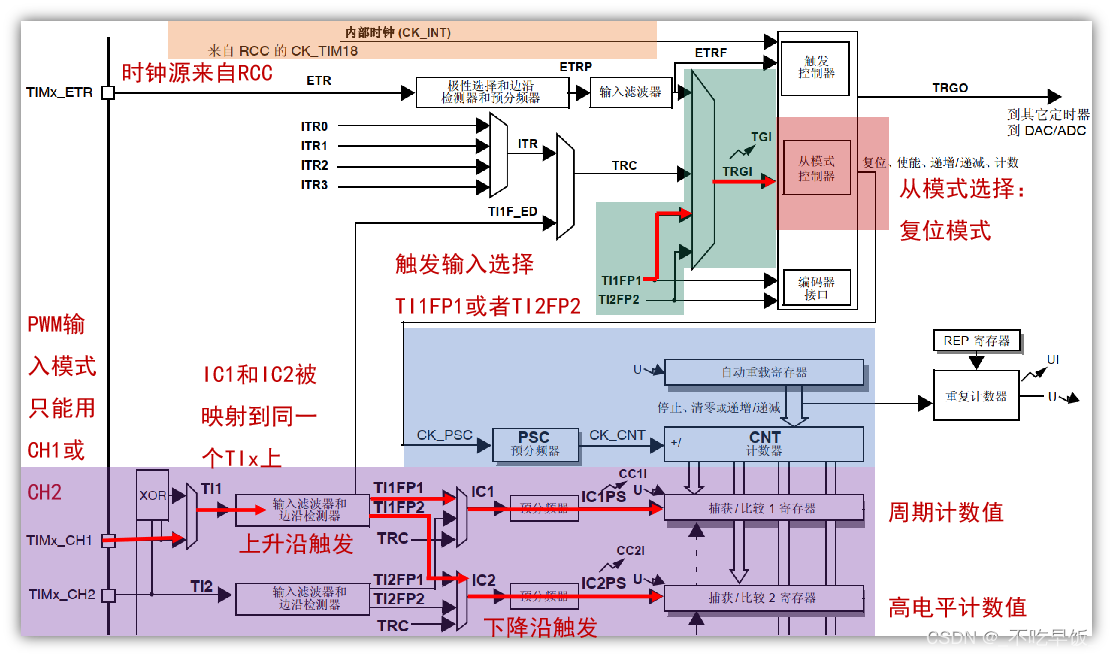
4.6.2,PWM输入模式时序(熟悉)
4.6.3,高级定时器PWM输入模式实验配置步骤(掌握)

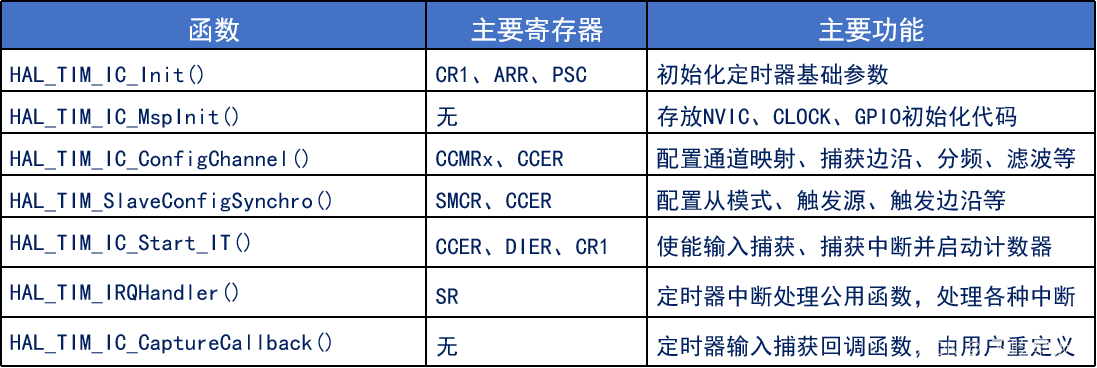
HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

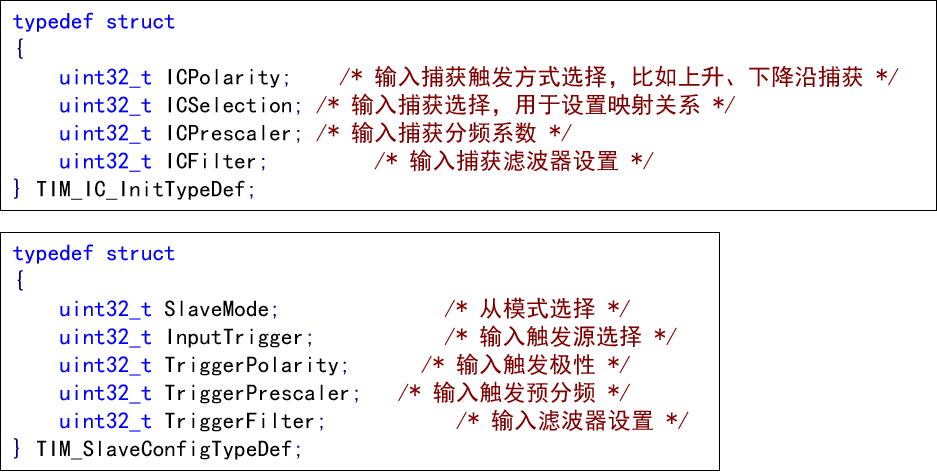
HAL_TIM_IC_ConfigChannel()

HAL_TIM_SlaveConfigSynchro()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

HAL_TIM_IC_Start_IT()、 HAL_TIM_IC_Start()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_IC_CaptureCallback()
相关HAL库函数介绍
关键结构体介绍
4.6.4,编程实战:高级定时器PWM输入模式实验(掌握)