图表示学习 Graph Representation Learning chapter1 引言
- 前言
- 1.1图的定义
- 1.1.1多关系图
- 1.1.2特征信息
- 1.2机器学习在图中的应用
- 1.2.1 节点分类
- 1.2.2 关系预测
- 1.2.3 聚类和组织检测
- 1.2.4 图分类、回归、聚类
前言
虽然我并不研究图神经网络,但是我认为图高效的表示方式还是值得所有人去学一下的,或许将来觉得这个很有意思呢?
当然啦,这也作为北京大学 图神经网络这门课的课程笔记吧,希望各位批评指教,也希望大家一起进步。
1.1图的定义
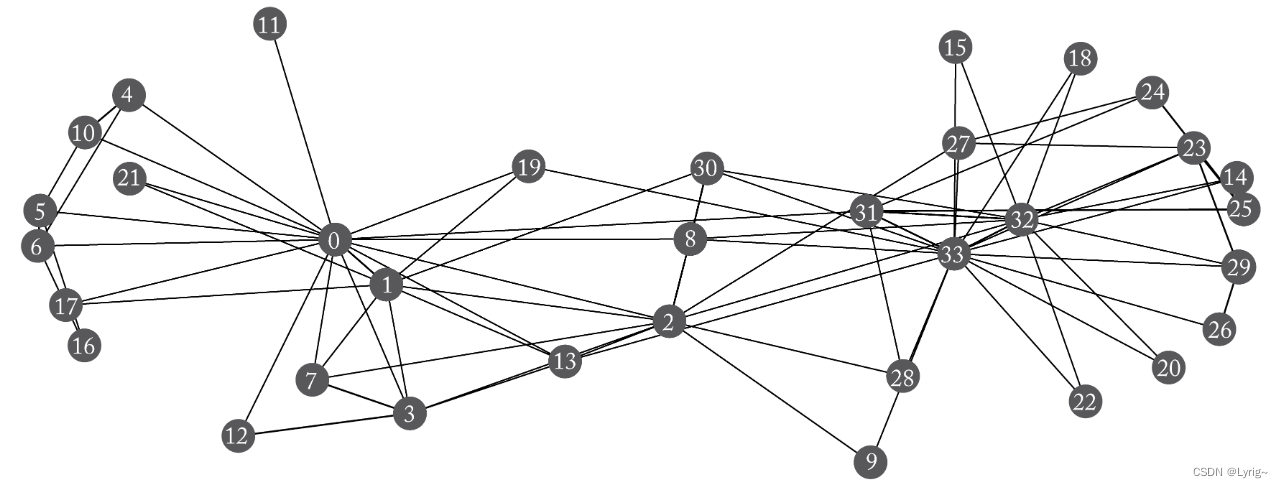
图可以定义为如下结构
G
=
(
V
,
E
)
\mathcal{G=(V, E)}
G=(V,E)
包含节点集
v
∈
V
v\in\mathcal{V}
v∈V和边集
(
u
,
v
)
∈
E
,
u
,
v
∈
V
(u, v)\in \mathcal{E}, u, v\in \mathcal{V}
(u,v)∈E,u,v∈V
对于边的表示,可以用邻接矩阵表示 A ∈ R ∣ V ∣ × ∣ V ∣ A\in R^{\mathcal{|V|\times|V|}} A∈R∣V∣×∣V∣,如果包含 ( u , v ) ∈ E (u,v)\in \mathcal{E} (u,v)∈E,则 A [ u , v ] = 1 A[u, v]=1 A[u,v]=1。由此可得无向图的邻接矩阵为对称矩阵,而有向图则不一定。同时,如果我们给边带上权重,则 A [ u , v ] = r ∈ R A[u,v]=r\in R A[u,v]=r∈R。
1.1.1多关系图
简单来说就是我们可以规定有多种边,这时,边表示为 ( u , τ , v ) ∈ E \mathcal{(u,\tau,v)\in E} (u,τ,v)∈E,其中 τ \tau τ为我们规定的边的类型。这时对于每一个类型,我们都可以构建一个邻接矩阵 A τ A_\tau Aτ。把所有邻接矩阵合并为一个邻接矩阵向量,可以表示为 A ∈ R ∣ V ∣ × ∣ R ∣ × ∣ V ∣ \mathcal{A}\in \bold{R}^{\mathcal{|V|\times|R|\times|V|}} A∈R∣V∣×∣R∣×∣V∣,其中 R \mathcal{R} R为类型的集合。
下面介绍两类多关系图
异质图在这一类图中,节点也被分类,于是点集可以划分为完全不相交的集合的并集。
V
=
V
1
∪
V
2
∪
.
.
.
∪
V
k
,
V
i
∩
V
j
=
∅
,
∀
i
≠
j
\mathcal{V=V_1\cup V_2 \cup ... \cup V_k, V_i\cap V_j=\empty, \forall i\neq j}
V=V1∪V2∪...∪Vk,Vi∩Vj=∅,∀i=j
图中的边通常根据节点的类型满足某些限制,如只连接同一类点之类的。
多路图我们假设一个图分为k层,节点在每一层都有相同的,这时我们认为每一层表达某个特殊的种类,于是我们可以有层内的边,也可以有层间的边。
1.1.2特征信息
为表达节点级别的信息,我们可以用这样 X ∈ R ∣ V ∣ × m \mathcal{X\in R^{|V|\times m}} X∈R∣V∣×m。
1.2机器学习在图中的应用
1.2.1 节点分类
任务描述为,根据一幅图,给每个节点一个标签 y u y_u yu,其中训练数据是我们会给定训练集中点的标签 V t r a i n ⊂ V \mathcal{V_{train}\subset V} Vtrain⊂V,这训练集可能是整个图中的一个小的子集,也有可能是大部分节点(让我们泛化不连接的节点)。
这任务不能简单理解为监督学习,最重要的不同是,图中的每个节点并非独立同分布的。对于传统的监督学习,我们通常要求采样的每个数据点都是独立的,否则我们需要对数据点之间的联系进行建模。同时我们也会要求这些采样的数据点是同分布的,否则我们无法保证模型的泛化性。而节点分类问题并不满足该假设,因为我们是在对互相联系的点进行建模。
例如,我们可以考虑节点间的同质性(如相邻的节点很有可能是一类的)、节点局部的结构等价性等。
1.2.2 关系预测
也成为连接预测、关系图补全等。
任务描述为对于一个图,我们给定一部分边集,作为训练集 V t r a i n \mathcal{V_{train}} Vtrain,我们的目的是补全这个图的边。该任务的复杂度高度依赖于我们所验证的图的数据类型。
这一问题实际上模糊了监督学习和非监督学习,因为他需要从已有的知识中获得增益。
1.2.3 聚类和组织检测
如果说前两个任务更像监督学习,该任务则是无监督学习。









![[职场] 会计学专业学什么 #其他#知识分享#职场发展](https://img-blog.csdnimg.cn/img_convert/8b7b90170669d1244af867a4e03cf6d5.jpeg)