HoloLens2 Visible-Light Tracking Camera(VLC)内参获取
- 问题描述
- 求解方法
- 总结
- 参考链接
问题描述
OpenCV中的许多功能都需要输入相机内参(Camera Intrinsics)。然而,HoloLens2并没有提供直接获取相机内参的API,what is provided is a function (MapImagePointToCameraUnitPlane()) from pixel to unit ray in the camera space。详见HoloLens2的官方论文HoloLens 2 Research Mode as a Tool for Computer Vision Research。
本文介绍获取HoloLens2 Visible-Light Tracking 相机内参的另一种方法——从Lookup Table (LuT)中求解相机内参。
求解方法
1. 获取LuT
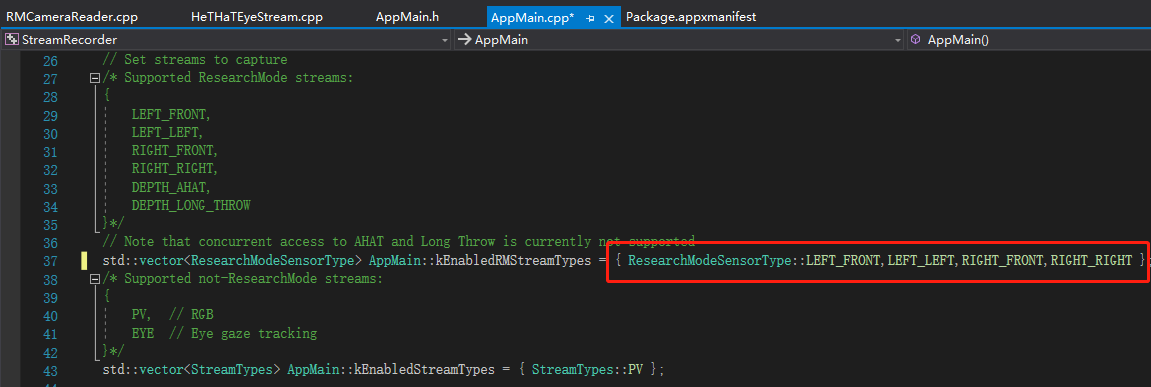
LuT通过微软提供的SteamRecorder工程得到,工程链接。
将工程中需要记录的相机类型修改为VLC:
将工程部署到HL并运行,LuT将被离线保存:

2.从LuT中求解相机内参
import numpy as np
def ReadFile(filepath):
with open(filepath, mode='rb') as depth_file:
lut = np.frombuffer(depth_file.read(), dtype="f")
lut = np.reshape(lut, (-1, 3))
return lut
def Fit_Linearity(x_array, y_array):
# x_array自变量 y_array因变量
# 方程个数
m = len(x_array)
# 计算过程
sum_x = np.sum(x_array)
sum_y = np.sum(y_array)
sum_xy = np.sum(x_array * y_array)
sum_xx = np.sum(x_array ** 2)
b = (sum_y * sum_xx - sum_x * sum_xy) / (m * sum_xx - (sum_x) ** 2)
k = (m * sum_xy - sum_x * sum_y) / (m * sum_xx - (sum_x) ** 2)
return k, b
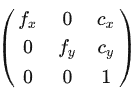
def Fit_CameraIntrinsics(lut, h, w):
"""
u = fx*xc+x0
v = fy*yc+y0
"""
where = np.where(lut[:, 2] != 0)
lut = lut[where]
xc = lut[:, 0] / lut[:, 2]
yc = lut[:, 1] / lut[:, 2]
u = np.arange(0.5, w, 1, float)
u = np.tile(u, h)
u = u[where]
v = np.arange(0.5, h, 1, float)
v = v.repeat(w)
v = v[where]
fx, x0 = Fit_Linearity(xc, u)
fy, y0 = Fit_Linearity(yc, v)
intrinsics = np.array([[fx, 0, x0], [0, fy, y0], [0, 0, 1]])
return intrinsics
if __name__ == '__main__':
# 设置图像分辨率
height = 480
width = 640
filepath = 'D:\\Paper\\HoloLens\\Record\\2022-12-27-053238\\VLC RR_lut.bin' # the file path of LuT that you saved
lut = ReadFile(filepath)
camera_intrinsics = Fit_CameraIntrinsics(lut, height,width)
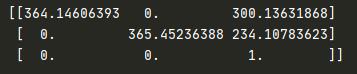
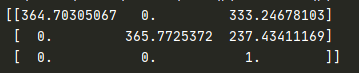
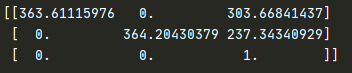
print(camera_intrinsics)
最终输出相机内参如下:

总结

参考链接
https://blog.csdn.net/scy261983626/article/details/117224024
https://github.com/microsoft/HoloLens2ForCV/issues/37