👑欢迎大家订阅本专栏,一起学习RT-DETR👑
一、本文介绍
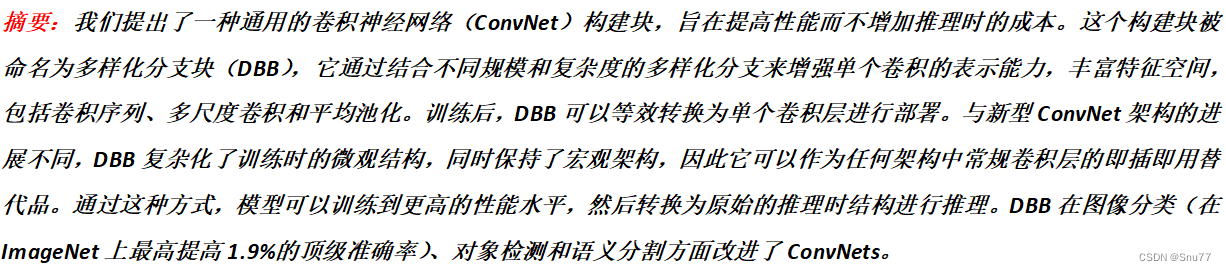
本文给大家带来的是改进机制是一种替换多元分支模块(Diverse Branch Block),Diverse Branch Block (DBB) 是一种用于增强卷积神经网络性能的结构重新参数化技术。这种技术的核心在于结合多样化的分支,这些分支具有不同的尺度和复杂度,从而丰富特征空间。本文改进是基于ResNet18、ResNet34、ResNet50、ResNet101,文章中均以提供,本专栏的改进内容全网独一份深度改进RT-DETR非那种无效Neck部分改进,同时本文的改进也支持主干上的即插即用,本文内容也支持PP-HGNetV2版本的修改。
专栏链接:RT-DETR剑指论文专栏,持续复现各种顶会内容——论文收割机RT-DETR
目录
一、本文介绍
二、Diverse Branch Block原理
2.1 Diverse Branch Block的基本原理
2.2 多样化分支结构
2.3 训练与推理分离
2.4 宏观架构不变
三、Diverse Branch Block的完整代码
四、 手把手教你添加Diverse Branch Block(注意看此处)
4.1 修改Basicclock/Bottleneck的教程
4.1.1 修改一
4.1.2 修改二
4.2 修改主干上即插即用的教程
4.2.1 修改一(如果修改了4.1教程此步无需修改)
4.2.2 修改二
4.2.3 修改三
4.2.4 修改四
五、Diverse Branch Block的yaml文件
5.1 替换ResNet的yaml文件1(ResNet18版本)
5.2 替换ResNet的yaml文件1(ResNet50版本)
5.3 即插即用的yaml文件(HGNetV2版本)
六、成功运行记录
6.1 ResNet18运行成功记录截图
6.2 ResNet50运行成功记录截图
6.3 HGNetv2运行成功记录截图
七、全文总结
二、Diverse Branch Block原理
论文地址:论文官方地址
代码地址:官方代码地址
2.1 Diverse Branch Block的基本原理
Diverse Branch Block(DBB)的基本原理是在训练阶段增加卷积层的复杂性,通过引入不同尺寸和结构的卷积分支来丰富网络的特征表示能力。我们可以将基本原理可以概括为以下几点:
1. 多样化分支结构:DBB 结合了不同尺度和复杂度的分支,如不同大小的卷积核和平均池化,以增加单个卷积的特征表达能力。
2. 训练与推理分离:在训练阶段,DBB 采用复杂的分支结构,而在推理阶段,这些分支可以被等效地转换为单个卷积层,以保持高效推理。
3. 宏观架构不变:DBB 允许在不改变整体网络架构的情况下,作为常规卷积层的替代品插入到现有网络中。
下面我将为大家展示Diverse Branch Block(DBB)的设计示例:
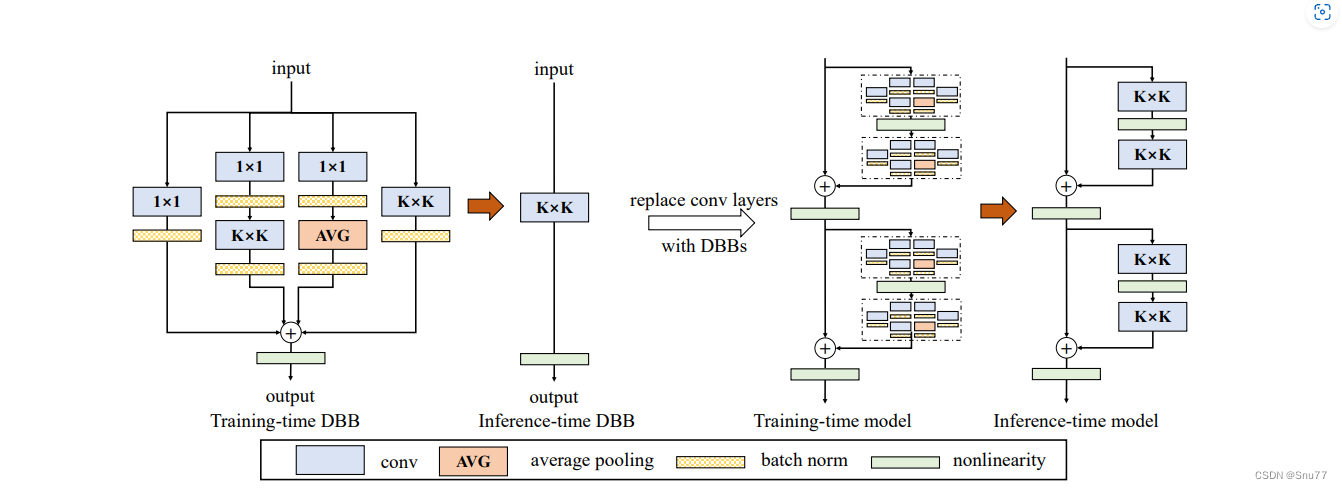
在训练时(左侧),DBB由不同大小的卷积层和平均池化层组成,这些层以一种复杂的方式并行排列,并最终合并输出。训练完成后,这些复杂的结构会转换成单个卷积层,用于模型的推理阶段(右侧),以此保持推理时的效率。这种转换允许DBB在保持宏观架构不变的同时,增加训练时的微观结构复杂性。
2.2 多样化分支结构
多样化分支结构是在卷积神经网络中引入的一种结构,旨在通过多样化的分支来增强模型的特征提取能力。这些分支包含不同尺寸的卷积层和池化层,以及其他潜在的操作,它们并行工作以捕获不同的特征表示。在训练完成后,这些复杂的结构可以合并并简化为单个的卷积层,以便在推理时不增加额外的计算负担。这种设计使得DBB可以作为现有卷积层的直接替换,增强了现有网络架构的性能,而不需要修改整体架构。
下面我详细展示了如何通过六种转换方法将训练时的Diverse Branch Block(DBB)转换为推理时的常规卷积层,每一种转换对应于一种特定的操作:

1. Transform I:将具有批量规范化(batch norm)的卷积层融合。
2. Transform II:合并具有相同配置的卷积层的输出。
3. Transform III:合并序列卷积层。
4. Transform IV:通过深度串联(concat)来合并卷积层。
5. Transform V:将平均池化(AVG)操作融入卷积操作中。
6. Transform VI:结合不同尺度的卷积层。
可以看到右侧的框显示了经过这些转换后,可以实现的推理时DBB,其中包含了常规卷积、平均池化和批量规范化操作。这些转换确保了在不增加推理时负担的同时,能够在训练时利用DBB的多样化特征提取能力。
2.3 训练与推理分离
训练与推理分离的概念是指在模型训练阶段使用复杂的DBB结构,而在模型推理阶段则转换为简化的卷积结构。这种设计允许模型在训练时利用DBB的多样性来增强特征提取和学习能力,而在实际应用中,即推理时,通过减少计算量来保持高效。这样,模型在保持高性能的同时,也保证了运行速度和资源效率。
上面我将展示在训练阶段如何通过不同的卷积组合(如图中的1x1和KxK卷积),以及在推理阶段如何将这些组合转换成一个简化的结构(如图中的转换IV所示的拼接操作):
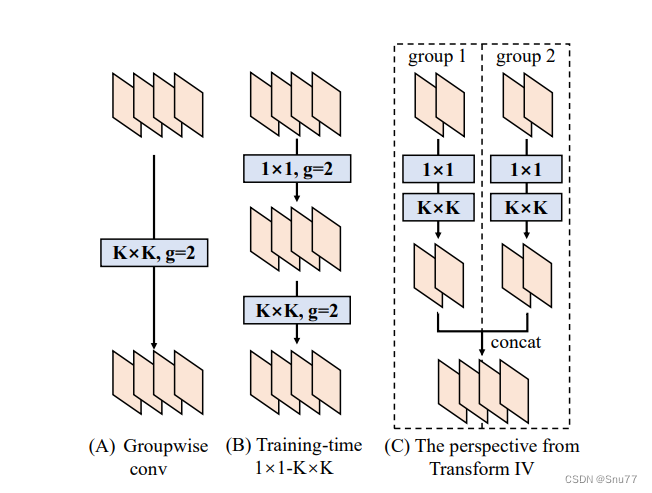
经过分析,我们可以发现它说明了三种不同的情况:
A)组卷积(Groupwise conv):将输入分成多个组,每个组使用不同的卷积核。
B)训练时的1x1-KxK结构:首先应用1x1的卷积(减少特征维度),然后是分组的KxK卷积。
C)从转换IV的角度看:这是将多个分组的卷积输出合并的视角。这里,组内卷积后的特征图先分别通过1x1卷积处理,然后再进行拼接(concat)。
2.4 宏观架构不变
宏观架构不变指的是DBB在设计时考虑到了与现有的网络架构兼容性,确保可以在不改变整体网络架构(如ResNet等流行架构)的前提下,将DBB作为一个模块嵌入。这意味着DBB增强了网络的特征提取能力,同时保持了原有网络结构的布局,确保了推理时的效率和性能。这样的设计允许研究者和开发者将DBB直接应用到现有的深度学习模型中,而无需进行大规模的架构调整。
三、Diverse Branch Block的完整代码
核心代码的使用方式看章节四!
import numpy as np
import torch
from collections import OrderedDict
import torch.nn as nn
import torch.nn.functional as F
__all__ = ['DiverseBranchBlock']
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
def transI_fusebn(kernel, bn):
gamma = bn.weight
std = (bn.running_var + bn.eps).sqrt()
return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
def transII_addbranch(kernels, biases):
return sum(kernels), sum(biases)
def transIII_1x1_kxk(k1, b1, k2, b2, groups):
if groups == 1:
k = F.conv2d(k2, k1.permute(1, 0, 2, 3)) #
b_hat = (k2 * b1.reshape(1, -1, 1, 1)).sum((1, 2, 3))
else:
k_slices = []
b_slices = []
k1_T = k1.permute(1, 0, 2, 3)
k1_group_width = k1.size(0) // groups
k2_group_width = k2.size(0) // groups
for g in range(groups):
k1_T_slice = k1_T[:, g * k1_group_width:(g + 1) * k1_group_width, :, :]
k2_slice = k2[g * k2_group_width:(g + 1) * k2_group_width, :, :, :]
k_slices.append(F.conv2d(k2_slice, k1_T_slice))
b_slices.append(
(k2_slice * b1[g * k1_group_width:(g + 1) * k1_group_width].reshape(1, -1, 1, 1)).sum((1, 2, 3)))
k, b_hat = transIV_depthconcat(k_slices, b_slices)
return k, b_hat + b2
def transIV_depthconcat(kernels, biases):
return torch.cat(kernels, dim=0), torch.cat(biases)
def transV_avg(channels, kernel_size, groups):
input_dim = channels // groups
k = torch.zeros((channels, input_dim, kernel_size, kernel_size))
k[np.arange(channels), np.tile(np.arange(input_dim), groups), :, :] = 1.0 / kernel_size ** 2
return k
# This has not been tested with non-square kernels (kernel.size(2) != kernel.size(3)) nor even-size kernels
def transVI_multiscale(kernel, target_kernel_size):
H_pixels_to_pad = (target_kernel_size - kernel.size(2)) // 2
W_pixels_to_pad = (target_kernel_size - kernel.size(3)) // 2
return F.pad(kernel, [H_pixels_to_pad, H_pixels_to_pad, W_pixels_to_pad, W_pixels_to_pad])
def conv_bn(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1,
padding_mode='zeros'):
conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups,
bias=False, padding_mode=padding_mode)
bn_layer = nn.BatchNorm2d(num_features=out_channels, affine=True)
se = nn.Sequential()
se.add_module('conv', conv_layer)
se.add_module('bn', bn_layer)
return se
class IdentityBasedConv1x1(nn.Conv2d):
def __init__(self, channels, groups=1):
super(IdentityBasedConv1x1, self).__init__(in_channels=channels, out_channels=channels, kernel_size=1, stride=1,
padding=0, groups=groups, bias=False)
assert channels % groups == 0
input_dim = channels // groups
id_value = np.zeros((channels, input_dim, 1, 1))
for i in range(channels):
id_value[i, i % input_dim, 0, 0] = 1
self.id_tensor = torch.from_numpy(id_value).type_as(self.weight)
nn.init.zeros_(self.weight)
def forward(self, input):
kernel = self.weight + self.id_tensor.to(self.weight.device).type_as(self.weight)
result = F.conv2d(input, kernel, None, stride=1, padding=0, dilation=self.dilation, groups=self.groups)
return result
def get_actual_kernel(self):
return self.weight + self.id_tensor.to(self.weight.device)
class BNAndPadLayer(nn.Module):
def __init__(self,
pad_pixels,
num_features,
eps=1e-5,
momentum=0.1,
affine=True,
track_running_stats=True):
super(BNAndPadLayer, self).__init__()
self.bn = nn.BatchNorm2d(num_features, eps, momentum, affine, track_running_stats)
self.pad_pixels = pad_pixels
def forward(self, input):
output = self.bn(input)
if self.pad_pixels > 0:
if self.bn.affine:
pad_values = self.bn.bias.detach() - self.bn.running_mean * self.bn.weight.detach() / torch.sqrt(
self.bn.running_var + self.bn.eps)
else:
pad_values = - self.bn.running_mean / torch.sqrt(self.bn.running_var + self.bn.eps)
output = F.pad(output, [self.pad_pixels] * 4)
pad_values = pad_values.view(1, -1, 1, 1)
output[:, :, 0:self.pad_pixels, :] = pad_values
output[:, :, -self.pad_pixels:, :] = pad_values
output[:, :, :, 0:self.pad_pixels] = pad_values
output[:, :, :, -self.pad_pixels:] = pad_values
return output
@property
def weight(self):
return self.bn.weight
@property
def bias(self):
return self.bn.bias
@property
def running_mean(self):
return self.bn.running_mean
@property
def running_var(self):
return self.bn.running_var
@property
def eps(self):
return self.bn.eps
class DiverseBranchBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=3,
stride=1, padding=None, dilation=1, groups=1,
internal_channels_1x1_3x3=None,
deploy=False, single_init=False):
super(DiverseBranchBlock, self).__init__()
self.deploy = deploy
self.nonlinear = Conv.default_act
self.kernel_size = kernel_size
self.out_channels = out_channels
self.groups = groups
if padding is None:
padding = autopad(kernel_size, padding, dilation)
assert padding == kernel_size // 2
if deploy:
self.dbb_reparam = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride,
padding=padding, dilation=dilation, groups=groups, bias=True)
else:
self.dbb_origin = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups)
self.dbb_avg = nn.Sequential()
if groups < out_channels:
self.dbb_avg.add_module('conv',
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1,
stride=1, padding=0, groups=groups, bias=False))
self.dbb_avg.add_module('bn', BNAndPadLayer(pad_pixels=padding, num_features=out_channels))
self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0))
self.dbb_1x1 = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=stride,
padding=0, groups=groups)
else:
self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=padding))
self.dbb_avg.add_module('avgbn', nn.BatchNorm2d(out_channels))
if internal_channels_1x1_3x3 is None:
internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
self.dbb_1x1_kxk = nn.Sequential()
if internal_channels_1x1_3x3 == in_channels:
self.dbb_1x1_kxk.add_module('idconv1', IdentityBasedConv1x1(channels=in_channels, groups=groups))
else:
self.dbb_1x1_kxk.add_module('conv1',
nn.Conv2d(in_channels=in_channels, out_channels=internal_channels_1x1_3x3,
kernel_size=1, stride=1, padding=0, groups=groups, bias=False))
self.dbb_1x1_kxk.add_module('bn1', BNAndPadLayer(pad_pixels=padding, num_features=internal_channels_1x1_3x3,
affine=True))
self.dbb_1x1_kxk.add_module('conv2',
nn.Conv2d(in_channels=internal_channels_1x1_3x3, out_channels=out_channels,
kernel_size=kernel_size, stride=stride, padding=0, groups=groups,
bias=False))
self.dbb_1x1_kxk.add_module('bn2', nn.BatchNorm2d(out_channels))
# The experiments reported in the paper used the default initialization of bn.weight (all as 1). But changing the initialization may be useful in some cases.
if single_init:
# Initialize the bn.weight of dbb_origin as 1 and others as 0. This is not the default setting.
self.single_init()
def get_equivalent_kernel_bias(self):
k_origin, b_origin = transI_fusebn(self.dbb_origin.conv.weight, self.dbb_origin.bn)
if hasattr(self, 'dbb_1x1'):
k_1x1, b_1x1 = transI_fusebn(self.dbb_1x1.conv.weight, self.dbb_1x1.bn)
k_1x1 = transVI_multiscale(k_1x1, self.kernel_size)
else:
k_1x1, b_1x1 = 0, 0
if hasattr(self.dbb_1x1_kxk, 'idconv1'):
k_1x1_kxk_first = self.dbb_1x1_kxk.idconv1.get_actual_kernel()
else:
k_1x1_kxk_first = self.dbb_1x1_kxk.conv1.weight
k_1x1_kxk_first, b_1x1_kxk_first = transI_fusebn(k_1x1_kxk_first, self.dbb_1x1_kxk.bn1)
k_1x1_kxk_second, b_1x1_kxk_second = transI_fusebn(self.dbb_1x1_kxk.conv2.weight, self.dbb_1x1_kxk.bn2)
k_1x1_kxk_merged, b_1x1_kxk_merged = transIII_1x1_kxk(k_1x1_kxk_first, b_1x1_kxk_first, k_1x1_kxk_second,
b_1x1_kxk_second, groups=self.groups)
k_avg = transV_avg(self.out_channels, self.kernel_size, self.groups)
k_1x1_avg_second, b_1x1_avg_second = transI_fusebn(k_avg.to(self.dbb_avg.avgbn.weight.device),
self.dbb_avg.avgbn)
if hasattr(self.dbb_avg, 'conv'):
k_1x1_avg_first, b_1x1_avg_first = transI_fusebn(self.dbb_avg.conv.weight, self.dbb_avg.bn)
k_1x1_avg_merged, b_1x1_avg_merged = transIII_1x1_kxk(k_1x1_avg_first, b_1x1_avg_first, k_1x1_avg_second,
b_1x1_avg_second, groups=self.groups)
else:
k_1x1_avg_merged, b_1x1_avg_merged = k_1x1_avg_second, b_1x1_avg_second
return transII_addbranch((k_origin, k_1x1, k_1x1_kxk_merged, k_1x1_avg_merged),
(b_origin, b_1x1, b_1x1_kxk_merged, b_1x1_avg_merged))
def switch_to_deploy(self):
if hasattr(self, 'dbb_reparam'):
return
kernel, bias = self.get_equivalent_kernel_bias()
self.dbb_reparam = nn.Conv2d(in_channels=self.dbb_origin.conv.in_channels,
out_channels=self.dbb_origin.conv.out_channels,
kernel_size=self.dbb_origin.conv.kernel_size, stride=self.dbb_origin.conv.stride,
padding=self.dbb_origin.conv.padding, dilation=self.dbb_origin.conv.dilation,
groups=self.dbb_origin.conv.groups, bias=True)
self.dbb_reparam.weight.data = kernel
self.dbb_reparam.bias.data = bias
for para in self.parameters():
para.detach_()
self.__delattr__('dbb_origin')
self.__delattr__('dbb_avg')
if hasattr(self, 'dbb_1x1'):
self.__delattr__('dbb_1x1')
self.__delattr__('dbb_1x1_kxk')
def forward(self, inputs):
if hasattr(self, 'dbb_reparam'):
return self.nonlinear(self.dbb_reparam(inputs))
out = self.dbb_origin(inputs)
if hasattr(self, 'dbb_1x1'):
out += self.dbb_1x1(inputs)
out += self.dbb_avg(inputs)
out += self.dbb_1x1_kxk(inputs)
return self.nonlinear(out)
def init_gamma(self, gamma_value):
if hasattr(self, "dbb_origin"):
torch.nn.init.constant_(self.dbb_origin.bn.weight, gamma_value)
if hasattr(self, "dbb_1x1"):
torch.nn.init.constant_(self.dbb_1x1.bn.weight, gamma_value)
if hasattr(self, "dbb_avg"):
torch.nn.init.constant_(self.dbb_avg.avgbn.weight, gamma_value)
if hasattr(self, "dbb_1x1_kxk"):
torch.nn.init.constant_(self.dbb_1x1_kxk.bn2.weight, gamma_value)
def single_init(self):
self.init_gamma(0.0)
if hasattr(self, "dbb_origin"):
torch.nn.init.constant_(self.dbb_origin.bn.weight, 1.0)
class ConvNormLayer(nn.Module):
def __init__(self,
ch_in,
ch_out,
filter_size,
stride,
groups=1,
act=None):
super(ConvNormLayer, self).__init__()
self.act = act
self.conv = nn.Conv2d(
in_channels=ch_in,
out_channels=ch_out,
kernel_size=filter_size,
stride=stride,
padding=(filter_size - 1) // 2,
groups=groups)
self.norm = nn.BatchNorm2d(ch_out)
def forward(self, inputs):
out = self.conv(inputs)
out = self.norm(out)
if self.act:
out = getattr(F, self.act)(out)
return out
class SELayer(nn.Module):
def __init__(self, ch, reduction_ratio=16):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(ch, ch // reduction_ratio, bias=False),
nn.ReLU(inplace=True),
nn.Linear(ch // reduction_ratio, ch, bias=False),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
class BasicBlock_DBB(nn.Module):
expansion = 1
def __init__(self,
ch_in,
ch_out,
stride,
shortcut,
act='relu',
variant='b',
att=False):
super().__init__()
self.shortcut = shortcut
if not shortcut:
if variant == 'd' and stride == 2:
self.short = nn.Sequential()
self.short.add_sublayer(
'pool',
nn.AvgPool2d(
kernel_size=2, stride=2, padding=0, ceil_mode=True))
self.short.add_sublayer(
'conv',
ConvNormLayer(
ch_in=ch_in,
ch_out=ch_out,
filter_size=1,
stride=1))
else:
self.short = ConvNormLayer(
ch_in=ch_in,
ch_out=ch_out,
filter_size=1,
stride=stride)
self.branch2a = ConvNormLayer(
ch_in=ch_in,
ch_out=ch_out,
filter_size=3,
stride=stride,
act='relu')
"""↓ 替换了此处的ConvNormLayer ↓"""
# 有需要的上面的也可以替换
self.branch2b = DiverseBranchBlock(
ch_out,
ch_out)
# self.branch2b = ConvNormLayer(
# ch_in=ch_out,
# ch_out=ch_out,
# filter_size=3,
# stride=1,
# act=None)
"""↑ 替换了此处的ConvNormLayer ↑"""
self.att = att
if self.att:
self.se = SELayer(ch_out)
def forward(self, inputs):
out = self.branch2a(inputs)
out = self.branch2b(out)
if self.att:
out = self.se(out)
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
out = out + short
out = F.relu(out)
return out
class BottleNeck_DBB(nn.Module):
expansion = 4
def __init__(self, ch_in, ch_out, stride, shortcut, act='relu', variant='d', att=False):
super().__init__()
if variant == 'a':
stride1, stride2 = stride, 1
else:
stride1, stride2 = 1, stride
width = ch_out
self.branch2a = ConvNormLayer(ch_in, width, 1, stride1, act=act)
self.branch2b = ConvNormLayer(width, width, 3, stride2, act=act)
"""↓ 替换了此处的ConvNormLayer ↓"""
# 有需要的上面的也可以替换
self.branch2c = DiverseBranchBlock(width, ch_out * self.expansion)
# self.branch2c = ConvNormLayer(width, ch_out * self.expansion, 1, 1)!2Z``
"""↑ 替换了此处的ConvNormLayer ↑"""
self.shortcut = shortcut
if not shortcut:
if variant == 'd' and stride == 2:
self.short = nn.Sequential(OrderedDict([
('pool', nn.AvgPool2d(2, 2, 0, ceil_mode=True)),
('conv', ConvNormLayer(ch_in, ch_out * self.expansion, 1, 1))
]))
else:
self.short = ConvNormLayer(ch_in, ch_out * self.expansion, 1, stride)
self.att = att
if self.att:
self.se = SELayer(ch_out)
def forward(self, x):
out = self.branch2a(x)
out = self.branch2b(out)
out = self.branch2c(out)
if self.att:
out = self.se(out)
if self.shortcut:
short = x
else:
short = self.short(x)
out = out + short
out = F.relu(out)
return out
四、 手把手教你添加Diverse Branch Block(注意看此处)
修改教程分两种,一种是替换修改ResNet中的Basicclock/Bottleneck模块的,一种是在主干上即插即用的修改教程,如果你只需要一种那么修改对应的就行,互相之间并不影响,需要注意的是即插即用的需要修改ResNet改进才行,链接如下:
ResNet文章地址:【RT-DETR改进涨点】ResNet18、34、50、101等多个版本移植到ultralytics仓库(RT-DETR官方一比一移植)
4.1 修改Basicclock/Bottleneck的教程
4.1.1 修改一
第一还是建立文件,我们找到如下ultralytics/nn/modules文件夹下建立一个目录名字呢就是'Addmodules'文件夹(用群内的文件的话已经有了无需新建)!然后在其内部建立一个新的py文件将核心代码复制粘贴进去即可。
4.1.2 修改二
第二步此处需要注意,因为我这里默认大家修改了ResNet系列的模型了,同级目录下应该有一个ResNet.py的文件夹,我们这里需要找到我们'ultralytics/nn/Addmodules/ResNet.py'创建的ResNet的文件夹(默认大家已经创建了!!!)

我们只需要修改上面的两步即可,后面复制yaml文件进行运行即可了,修改方法大家只要仔细看是非常简单的。
4.2 修改主干上即插即用的教程
4.2.1 修改一(如果修改了4.1教程此步无需修改)
第一还是建立文件,我们找到如下ultralytics/nn/modules文件夹下建立一个目录名字呢就是'Addmodules'文件夹(用群内的文件的话已经有了无需新建)!然后在其内部建立一个新的py文件将核心代码复制粘贴进去即可。
4.2.2 修改二
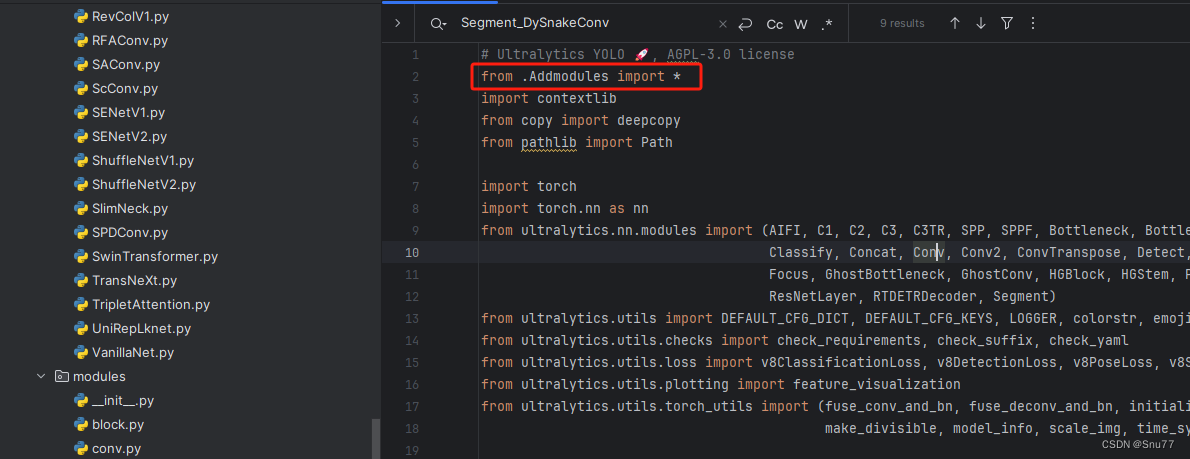
第二步我们在该目录下创建一个新的py文件名字为'__init__.py'(用群内的文件的话已经有了无需新建),然后在其内部导入我们的检测头如下图所示。
4.2.3 修改三
第三步我门中到如下文件'ultralytics/nn/tasks.py'进行导入和注册我们的模块(用群内的文件的话已经有了无需重新导入直接开始第四步即可)!
从今天开始以后的教程就都统一成这个样子了,因为我默认大家用了我群内的文件来进行修改!!
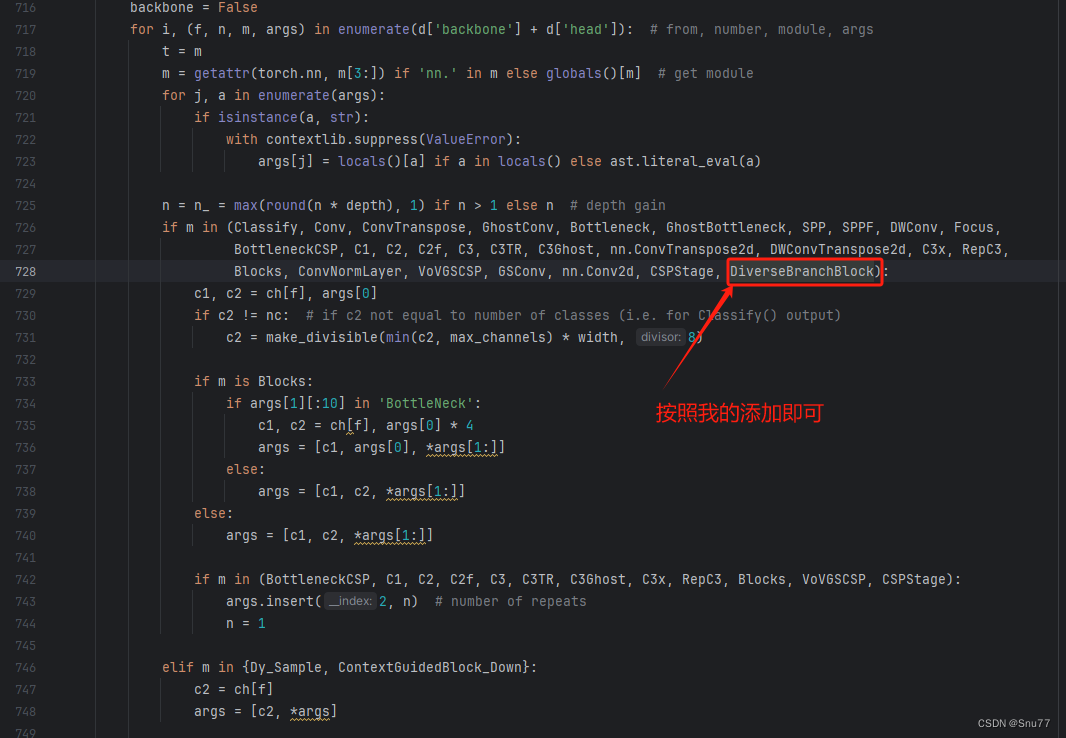
4.2.4 修改四
按照我的添加在parse_model里添加即可。
到此就修改完成了,大家可以复制下面的yaml文件运行。
五、Diverse Branch Block的yaml文件
5.1 替换ResNet的yaml文件1(ResNet18版本)
需要修改如下的ResNet主干才可以运行本文的改进机制 !
ResNet文章地址:【RT-DETR改进涨点】ResNet18、34、50、101等多个版本移植到ultralytics仓库(RT-DETR官方一比一移植)
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, ConvNormLayer, [32, 3, 2, 1, 'relu']] # 0-P1
- [-1, 1, ConvNormLayer, [32, 3, 1, 1, 'relu']] # 1
- [-1, 1, ConvNormLayer, [64, 3, 1, 1, 'relu']] # 2
- [-1, 1, nn.MaxPool2d, [3, 2, 1]] # 3-P2
- [-1, 2, Blocks, [64, BasicBlock_DBB, 2, False]] # 4
- [-1, 2, Blocks, [128, BasicBlock_DBB, 3, False]] # 5-P3
- [-1, 2, Blocks, [256, BasicBlock_DBB, 4, False]] # 6-P4
- [-1, 2, Blocks, [512, BasicBlock_DBB, 5, False]] # 7-P5
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 8 input_proj.2
- [-1, 1, AIFI, [1024, 8]]
- [-1, 1, Conv, [256, 1, 1]] # 10, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 11
- [6, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 12 input_proj.1
- [[-2, -1], 1, Concat, [1]]
- [-1, 3, RepC3, [256, 0.5]] # 14, fpn_blocks.0
- [-1, 1, Conv, [256, 1, 1]] # 15, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 16
- [5, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 17 input_proj.0
- [[-2, -1], 1, Concat, [1]] # 18 cat backbone P4
- [-1, 3, RepC3, [256, 0.5]] # X3 (19), fpn_blocks.1
- [-1, 1, Conv, [256, 3, 2]] # 20, downsample_convs.0
- [[-1, 15], 1, Concat, [1]] # 21 cat Y4
- [-1, 3, RepC3, [256, 0.5]] # F4 (22), pan_blocks.0
- [-1, 1, Conv, [256, 3, 2]] # 23, downsample_convs.1
- [[-1, 10], 1, Concat, [1]] # 24 cat Y5
- [-1, 3, RepC3, [256, 0.5]] # F5 (25), pan_blocks.1
- [[19, 22, 25], 1, RTDETRDecoder, [nc, 256, 300, 4, 8, 3]] # Detect(P3, P4, P5)
5.2 替换ResNet的yaml文件1(ResNet50版本)
需要修改如下的ResNet主干才可以运行本文的改进机制 !
ResNet文章地址:【RT-DETR改进涨点】ResNet18、34、50、101等多个版本移植到ultralytics仓库(RT-DETR官方一比一移植)
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, ConvNormLayer, [32, 3, 2, 1, 'relu']] # 0-P1
- [-1, 1, ConvNormLayer, [32, 3, 1, 1, 'relu']] # 1
- [-1, 1, ConvNormLayer, [64, 3, 1, 1, 'relu']] # 2
- [-1, 1, nn.MaxPool2d, [3, 2, 1]] # 3-P2
- [-1, 3, Blocks, [64, BottleNeck_DBB, 2, False]] # 4
- [-1, 4, Blocks, [128, BottleNeck_DBB, 3, False]] # 5-P3
- [-1, 6, Blocks, [256, BottleNeck_DBB, 4, False]] # 6-P4
- [-1, 3, Blocks, [512, BottleNeck_DBB, 5, False]] # 7-P5
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 8 input_proj.2
- [-1, 1, AIFI, [1024, 8]] # 9
- [-1, 1, Conv, [256, 1, 1]] # 10, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 11
- [6, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 12 input_proj.1
- [[-2, -1], 1, Concat, [1]] # 13
- [-1, 3, RepC3, [256]] # 14, fpn_blocks.0
- [-1, 1, Conv, [256, 1, 1]] # 15, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 16
- [5, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 17 input_proj.0
- [[-2, -1], 1, Concat, [1]] # 18 cat backbone P4
- [-1, 3, RepC3, [256]] # X3 (19), fpn_blocks.1
- [-1, 1, Conv, [256, 3, 2]] # 20, downsample_convs.0
- [[-1, 15], 1, Concat, [1]] # 21 cat Y4
- [-1, 3, RepC3, [256]] # F4 (22), pan_blocks.0
- [-1, 1, Conv, [256, 3, 2]] # 23, downsample_convs.1
- [[-1, 10], 1, Concat, [1]] # 24 cat Y5
- [-1, 3, RepC3, [256]] # F5 (25), pan_blocks.1
- [[19, 22, 25], 1, RTDETRDecoder, [nc, 256, 300, 4, 8, 6]] # Detect(P3, P4, P5)
5.3 即插即用的yaml文件(HGNetV2版本)
此版本为HGNetV2-l的yaml文件!
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, HGStem, [32, 48]] # 0-P2/4
- [-1, 6, HGBlock, [48, 128, 3]] # stage 1
- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8
- [-1, 6, HGBlock, [96, 512, 3]] # stage 2
- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P3/16
- [-1, 6, HGBlock, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut
- [-1, 6, HGBlock, [192, 1024, 5, True, True]]
- [-1, 6, HGBlock, [192, 1024, 5, True, True]] # stage 3
- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P4/32
- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2
- [-1, 1, AIFI, [1024, 8]]
- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1
- [[-2, -1], 1, Concat, [1]]
- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0
- [-1, 1, Conv, [256, 1, 1]] # 17, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0
- [[-2, -1], 1, Concat, [1]] # cat backbone P4
- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1
- [-1, 1, DiverseBranchBlock, [384, 3, 2]] # 22, downsample_convs.0
- [[-1, 17], 1, Concat, [1]] # cat Y4
- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0
- [-1, 1, DiverseBranchBlock, [384, 3, 2]] # 25, downsample_convs.1
- [[-1, 12], 1, Concat, [1]] # cat Y5
- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1
- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
六、成功运行记录
6.1 ResNet18运行成功记录截图

6.2 ResNet50运行成功记录截图

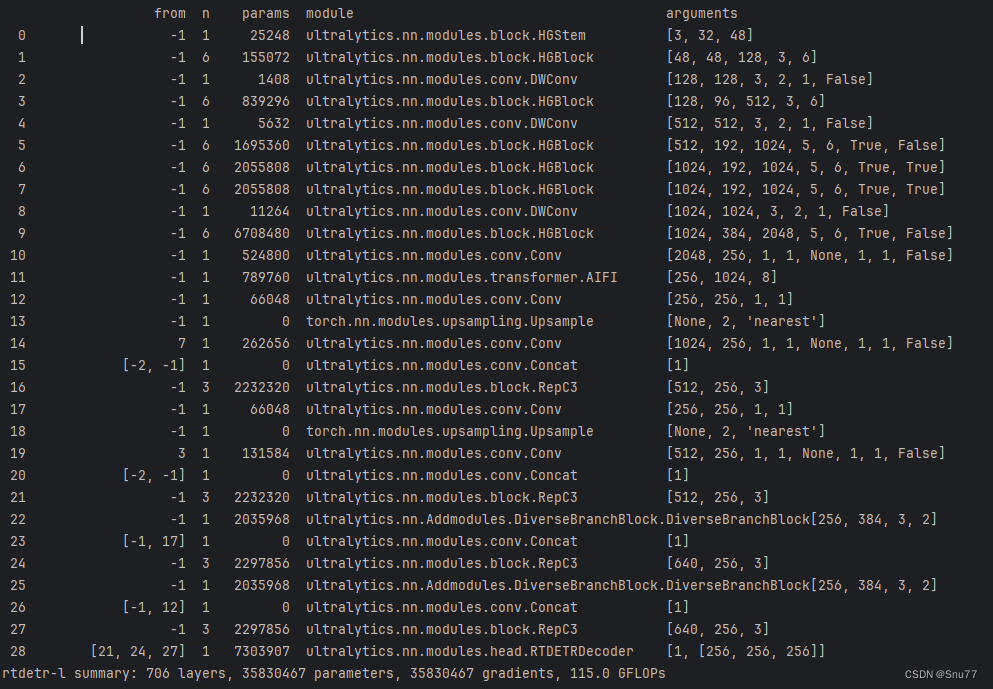
6.3 HGNetv2运行成功记录截图
七、全文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的RT-DETR改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏链接:RT-DETR剑指论文专栏,持续复现各种顶会内容——论文收割机RT-DETR