题目要求:
一、基本要求
二、硬件框图

三、功能描述
3.1 初始化
3.2 显示功能

3.3 按键功能
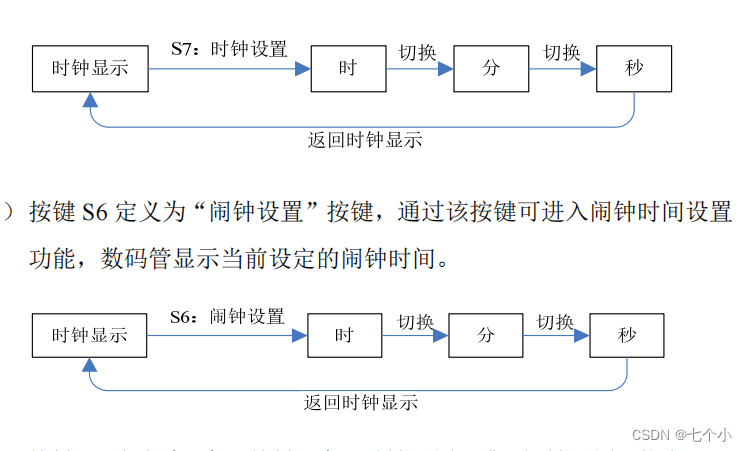
3.4 闹钟提示功能
底层函数内容:
1.初始化底层驱动专用文件
比如先用3个IO口控制74HC138译码器,控制Y4为低电平;当Y4为低电平时,或非门74HC02控制Y4C为高电平,使74HC573的OE端口有效,OE端口有效时,可使用P0口控制LED的亮灭。
可以去多了解74HC138译码器,74HC02或非门,74HC573八路输出透明锁存器的相关内容会更好理解
#include <Init.h>
//关闭外设
void System_Init()
{
P0 = 0xff;
P2 = P2 & 0x1f | 0x80;
P2 &= 0x1f;
P0 = 0x00;
P2 = P2 & 0x1f | 0xa0;
P2 &= 0x1f;
}
#include <STC15F2K60S2.H>
void System_Init();
2.Led底层驱动专用文件
与初始化底层驱动专用文件同理,需要了解对应的锁存器控制,可以在使用的芯片数据手册查看
#include <Led.h>
void Led_Disp(unsigned char addr,enable)
{
static unsigned char temp = 0x00;
static unsigned char temp_old = 0xff;
if(enable)
temp |= 0x01 << addr;
else
temp &= ~(0x01 << addr);
if(temp != temp_old)
{
P0 = ~temp;
P2 = P2 & 0x1f |0x80;
P2 &= 0x1f;
temp_old = temp;
}
}
#include <STC15F2K60S2.H>
void Led_Disp(unsigned char addr,enable);
3.按键底层驱动专用文件
(板子上的按键从按键4开始到按键19,可根据实际硬件修改)
#include "Key.h"
unsigned char Key_Read()
{
unsigned char temp = 0;
if(P33 == 0)temp = 4;
if(P32 == 0)temp = 5;
if(P31 == 0)temp = 6;
if(P30 == 0)temp = 7;
return temp;
}
//头文件
#include <STC15F2K60S2.H>
unsigned char Key_Read();
4.数码管底层驱动专用文件
(这个板子使用的为共阳数码管,若使用的为共阴数码管要更换对应的段码表和位选表;与初始化底层驱动专用文件同理,需要了解对应的锁存器控制,可以在使用的芯片数据手册查看)
#include <Seg.h>
code unsigned char Seg_Dula[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xff,
//0x88, //A
//0x83, //b
//0xc6, //C
//0xa1, //d
//0x86, //E
//0x8e //F
0xbf, //-
0xc6
};
unsigned char Seg_Wela[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
void Seg_Disp(unsigned char wela,dula,point)
{
P0 = 0xff;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
P0 = Seg_Wela[wela];
P2 = P2 & 0x1f | 0xc0;
P2 &= 0x1f;
P0 = Seg_Dula[dula];
if(point)
P0 &= 0x7f;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
}
//头文件
#include <STC15F2K60S2.H>
void Seg_Disp(unsigned char wela,dula,point);
5.//温度底层驱动专用头文件
/* # 单总线代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
/* # 单总线代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include "onewire.h"
sbit DQ = P1^4;
//单总线内部延时函数
void Delay_OneWire(unsigned int t)
{
unsigned char i;
while(t--){
for(i=0;i<12;i++);
}
}
//单总线写操作
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//单总线读操作
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
//函数名:读取温度函数
//入口参数:无
//函数功能:完成温度转换,并返回转换之后的温度数据
float Read_Temperature()
{
unsigned char high,low;//返回温度数据的低八位和高八位
init_ds18b20();//初始化
Write_DS18B20(0xcc);//跳过ROM
Write_DS18B20(0x44);//开始温度转换
init_ds18b20();//初始化
Write_DS18B20(0xcc);//跳过ROM
Write_DS18B20(0xbe);//读取温度
low = Read_DS18B20();//读取低位
high = Read_DS18B20();//读取高位
return ((high << 8) |low) / 16.0;//返回温度保留后两位精度数据
}
//头文件
#include <STC15F2K60S2.H>
float Read_Temperature();
6.//时钟底层驱动专用头文件
/* # DS1302代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include "ds1302.h"
#include <intrins.h>
sbit SCK = P1^7;
sbit SDA = P2^3;
sbit RST = P1^3;
//写字节
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK = 0;
SDA = temp&0x01;
temp>>=1;
SCK=1;
}
}
//向DS1302寄存器写入数据
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
//从DS1302寄存器读出数据
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
//设置时钟,可以根据数据手册调整要设置的时钟状态,这里设置的为时分秒
void Set_Rct(unsigned char*ucRct)//unsigned char* ucRtc指向我存放时分秒的数组指针
{
unsigned char i;
Write_Ds1302_Byte(0x8e,0x00);
for(i=0;i<3;i++)
Write_Ds1302_Byte(0x84-2*i,ucRct[i]);
Write_Ds1302_Byte(0x8e,0x80);
}
//读取时钟
void Read_Rct(unsigned char*ucRct)
{
unsigned char i;
for(i=0;i<3;i++)
ucRct[i] = Read_Ds1302_Byte(0x85-2*i);
}
//头文件
#include <STC15F2K60S2.H>
void Write_Ds1302(unsigned char temp) ;
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte ( unsigned char address );
void Set_Rct(unsigned char*ucRct);
void Read_Rct(unsigned char*ucRct);
工程主函数内容:
1.头文件声明(把需要用到的头文件添加进来)
//头文件声明区
#include <STC15F2K60S2.H>//单片机寄存器专用头文件
#include "Init.h"//初始化底层驱动专用头文件
#include "Led.h"//Led底层驱动专用头文件
#include "Key.h"//按键底层驱动专用头文件
#include "Seg.h"//数码管底层驱动专用头文件
#include "ds1302.h"//时钟底层驱动专用头文件
#include "onewire.h"//温度底层驱动专用头文件
2.变量声明(把需要用到的所有变量现在这里进行声明)
//变量声明区
unsigned char Key_Val,Key_Old,Key_Down,Key_Up;//按键专用变量
unsigned char Key_Slow_Down;//按键减速专用变量
unsigned char Seg_Pos;//数码管扫描专用变量
unsigned char Seg_Slow_Down;//数码管减速专用变量
unsigned char Seg_Buf[8] = {10,10,10,10,10,10,10,10};//数码管显示数据存放数组
unsigned char Seg_Point[8] = {0,0,0,0,0,0,0,0};//数码管小数点数据存放数组
unsigned char ucLed[8] = {0,0,0,0,0,0,0,0};//Led显示数据存放数组
unsigned char Seg_Disp_Mode;//数码管显示模式变量 0-时间相关 1-温度相关
unsigned char Seg_Index;//时间相关显示内容 0-时钟显示 1-时钟设置 2-闹钟设置
unsigned char ucRct[3] = {0x23,0x59,0x50};//实时时钟数据数组 上电默认时间23:59:55
unsigned char ucRct_Set[3] = {0x23,0x59,0x50};//时钟数据设置数组
unsigned char ucRct_Index;//时钟设置数组指针
unsigned int Timer_500ms;//五百毫秒计时变量
bit Seg_Star_Flag;//数码管闪烁标志位
unsigned char Alarm[3] = {0x00,0x00,0x00};//闹钟数据储存数组
unsigned char Alarm_Set[3] = {0x00,0x00,0x00};//闹钟数据设置数组
unsigned char* Data_Flag[3] = {ucRct,ucRct_Set,Alarm_Set};//简化程序专用指针数组
bit Beep_Flag;//闹钟使能标志位 0-不使能 1-使能
unsigned int Timer_200ms;//两百毫秒计时变量
bit Led_Star_Flag;//Led闪烁标志位
unsigned char Temperature;//实时温度储存变量
3.按键处理函数(在这里编写按键控制的函数)
//键盘处理函数
void Key_Proc()
{
unsigned char i;//For循环专用变量
if(Key_Slow_Down)return;
Key_Slow_Down = 1;//键盘减速程序
Key_Val = Key_Read();//实时读取键码值
Key_Down = Key_Val & (Key_Val ^ Key_Old);//捕捉按键下降沿
Key_Up = ~ Key_Val & (Key_Val ^ Key_Old);//捕捉按键上升沿
Key_Old = Key_Val;//辅助扫描变量
if(Beep_Flag == 1)//闹钟使能状态
{
if(Key_Down != 0)//按下任意按键
Beep_Flag = 0;//关闭闹钟
return;//跳出按键子程序 避免执行下面的语句
}
if(Seg_Index == 0)//处于非设置界面
{
if(Key_Old == 4)
Seg_Disp_Mode = 1;
else
Seg_Disp_Mode = 0;
}
switch (Key_Down)
{
case 7://时钟设置
if(Seg_Disp_Mode == 0)//处于时钟相关界面
{
if(Seg_Index == 0)//处于时钟显示界面
{
for(i=0;i<3;i++)
ucRct_Set[i] = ucRct[i];//读取实时数据
Seg_Index = 1;//切换到时钟设置界面
}
else if(Seg_Index == 1)//处于时钟设置界面
{
if(++ucRct_Index == 3)
{
Set_Rct(ucRct_Set);//保存时钟数据
ucRct_Index = 0;//切换到时钟显示界面
Seg_Index = 0;//指针复位
}
}
}
break;
case 6://闹钟设置
if(Seg_Disp_Mode == 0)//处于时钟相关界面
{
if(Seg_Index == 0)//处于时钟显示界面
Seg_Index = 2;//切换到闹钟设置界面
else if(Seg_Index == 2)//处于闹钟设置界面
{
if(++ucRct_Index == 3)
{
for(i=0;i<3;i++)
Alarm[1] = Alarm_Set[i];//保存闹钟数据
ucRct_Index = 0;//切换到时钟显示界面
Seg_Index = 0;//指针复位
}
}
}
break;
case 5://参数自加
if(Seg_Disp_Mode == 0)//时钟相关
{
// if(Seg_Index == 1)//设置时钟
// {
// ucRct_Set[ucRct_Index]++;
// if(ucRct_Set[ucRct_Index] % 16 == 0x0a)//16进制 (9+1)=A
// ucRct_Set[ucRct_Index] += 6;//16进制(A+6)=10
// if(ucRct_Set[ucRct_Index] == (ucRct_Index?0x60:0x24))//使用BCD码的形式存储,用十六进制计算显示
// ucRct_Set[ucRct_Index] = (ucRct_Index?0x59:0x23);
// }
Data_Flag[Seg_Index][ucRct_Index]++;
if(Data_Flag[Seg_Index][ucRct_Index] % 16 == 0x0a)//16进制 (9+1)=A //使用BCD码的形式存储,用十六进制计算显示
Data_Flag[Seg_Index][ucRct_Index] += 6;//16进制(A+6)=10
if(Data_Flag[Seg_Index][ucRct_Index] == (ucRct_Index?0x60:0x24))//设置上限
Data_Flag[Seg_Index][ucRct_Index] = (ucRct_Index?0x59:0x23);
}
break;
case 4:
if(Seg_Disp_Mode == 0)//时钟相关
{
// if(Seg_Index == 1)//设置时钟
// {
// ucRct_Set[ucRct_Index]--;
// if(ucRct_Set[ucRct_Index] % 16 == 0x0f)//16进制 (10-1)=F //BCD码需要手动进行十进制进位
// ucRct_Set[ucRct_Index] -= 6;//16进制 (F-6)=9
// if(ucRct_Set[ucRct_Index] == 0xf9)//16进制(0-7)=FFFF FFFF FFFF FFF9 取最后两位
// ucRct_Set[ucRct_Index] = 0;
// }
Data_Flag[Seg_Index][ucRct_Index]--;
if(Data_Flag[Seg_Index][ucRct_Index] % 16 == 0x0f)//16进制 (10-1)=F //BCD码需要手动进行十进制进位
Data_Flag[Seg_Index][ucRct_Index] -= 6;//16进制 (F-6)=9
if(Data_Flag[Seg_Index][ucRct_Index] == 0xf9)//16进制(0-7)=FFFF FFFF FFFF FFF9 取最后两位 //设置下限
Data_Flag[Seg_Index][ucRct_Index] = 0;
}
break;
}
}
4.信息处理函数(需要使用到到的函数进行简单的预处理)
//信息处理函数
void Seg_Proc()
{
unsigned char i;//For循环专用变量
if(Seg_Slow_Down)return;
Seg_Slow_Down = 1;//数码管减速程序
//数据读取区域
Read_Rct(ucRct);//实时读取时钟数据
Temperature = Read_Temperature();//实时读取温度数据
//数据显示区域
// if(Seg_Disp_Mode == 0)//时钟
// switch (Seg_Index)
// {
// case 0://时钟显示
// Seg_Buf[2] = Seg_Buf[5] = 11;
// for(i=0;i<3;i++)
// {
// Seg_Buf[3*i] = ucRct[i] / 16;
// Seg_Buf[3*i+1] = ucRct[i] % 16;
// }
// break;
// case 1://时钟设置
// Seg_Buf[2] = Seg_Buf[5] = 11;
// for(i=0;i<3;i++)
// {
// Seg_Buf[3*i] = ucRct_Set[i] / 16;
// Seg_Buf[3*i+1] = ucRct_Set[i] % 16;
// }
// Seg_Buf[3*ucRct_Index] = Seg_Star_Flag?10:ucRct_Set[ucRct_Index] / 16;
// Seg_Buf[3*ucRct_Index+1] = Seg_Star_Flag?10:ucRct_Set[ucRct_Index] % 16;
// break;
// }
/*
遇到在某个状态下显示格式不变
但是显示数据数组需要发生改变时
可以将这些数组按照顺序放入一个指针数组内
然后通过访问指针数组达到简化程序的目的
*/
if(Seg_Disp_Mode == 0)//时钟
{
Seg_Buf[2] = Seg_Buf[5] = 11;
for(i=0;i<3;i++)
{
Seg_Buf[3*i] = Data_Flag[Seg_Index][i] / 16;
Seg_Buf[3*i+1] = Data_Flag[Seg_Index][i] % 16;
}
if(Seg_Index >0)//闪烁使能
{
Seg_Buf[3*ucRct_Index] = Seg_Star_Flag?10:Data_Flag[Seg_Index][ucRct_Index] / 16;
Seg_Buf[3*ucRct_Index+1] = Seg_Star_Flag?10:Data_Flag[Seg_Index][ucRct_Index] % 16;
}
}
else//温度
{
for(i=0;i<5;i++)
Seg_Buf[i] = 10;
Seg_Buf[5] = Temperature / 10;
Seg_Buf[6] = Temperature % 10;
Seg_Buf[7] = 12;
}
}
5.其他函数(其他编写的函数,在这里书写会比较方便理解)
//其他函数
void Led_Prov()
{
if(Alarm[0] == ucRct[0] && Alarm[1] == ucRct[1] && Alarm[2] == ucRct[2])//闹钟使能
Beep_Flag = 1;
if((ucRct[2] % 16)== (Alarm[2] % 16 + 5))//过五秒后
Beep_Flag = 0;
ucLed[0] = Led_Star_Flag & Beep_Flag;//只有在闹钟使能条件下闪烁 //char 和bit 不能相乘,所以把*改成&
}
6.定时器中断初始化函数
(这个可以使用STC的定时器计算那里生成c代码,后面要自己添加ET0,EA打开中断)
//定时器中断初始化函数
void Timer0Init(void) //1毫秒@12.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1; //定时器中断0打开
EA = 1; //总中断打开
}
7.定时器1中断服务函数
(为了定时执行特定的任务,如此处设置了定时的时间触发了数码管和LED产生特定反应)//中断在测试时可以先注释掉,但是这里按键状态有延时,测试按键时可以解除注释
//定时器中断服务函数
void Timer0server()interrupt 1
{
if(++Key_Slow_Down == 10)Key_Slow_Down = 0;//键盘减速专用
if(++Seg_Slow_Down == 200)Seg_Slow_Down = 0;//数码管减速时间过长有时候会影响数码管的刷新,有问题的时候减短减速时间
if(++Seg_Pos == 8)Seg_Pos = 0;//数码管显示专用
Seg_Disp(Seg_Pos,Seg_Buf[Seg_Pos],Seg_Point[Seg_Pos]);
Led_Disp(Seg_Pos,ucLed[Seg_Pos]);
if(++Timer_500ms == 500)
{
Timer_500ms = 0;
Seg_Star_Flag ^= 1;
}
if(++Timer_200ms == 200)
{
Timer_200ms = 0;
Led_Star_Flag ^= 1;
}
}
8.主函数Main(调用书写的函数实现所需的相应功能)
//Main
void main()
{
Set_Rct(ucRct);//上电初始化实时时钟
Timer0Init();
Sys_Init();
while(1)
{
Key_Proc();
Seg_Proc();
Led_Prov();
}
}