本篇文章介绍了在TC397平台使用EB-tresos对GPT驱动模块进行配置的实战过程,不仅介绍了使用GTM来实现定时器的方案,还介绍了基于GPT12来实现连续定时器的实例。因为GTM是德国博世公司开发的IP,而英飞凌的芯片集成了这个IP,并在这个基础上搭建了通用定时器等功能,所以一个简单如定时器这种单片机的常用功能,配置实现起来也感觉非常的割裂,鉴于这种情况,笔者在概述上尽量的补充了一些概念来帮助读者理解后面的实战内容,并补充了基于GPT12来实现定时器的方案。
目录
概述
GTM(Generic Timer Module)
SCU(System Control Unit)
GPT12
环境与目标
EB-tresos配置GPT实现1ms定时器
MCU配置
GTM配置
GtmClusterConf_0
GtmGlobalConfiguration
McuGtmTimChannelAllocationConf
GPT配置
General
GptChannelConfiguration
GptNotification
GtmTimerOutputModuleConfiguration
IRQ配置
ResourceM配置
GPT驱动使用与调试
EB-tresos配置GPT实现2ms定时翻转I/O口
MCU配置
McuGpt12ModuleAllocationConf
McuPllDistributionSettingConfig
McuGpt12PrescalerConf
GPT配置
GptChannelConfiguration
GptNotification
Gpt12TimerOutputModuleConfiguration
IRQ配置
GPT12驱动使用与调试
概述
GPT(General Purpose Timer)驱动程序负责为 AUTOSAR规范中定义的标准计时器功能提供对应的API。相应的底层定时器引擎是可以是包含在AURIX2G系列处理器中的GTM定时器通道(TOM/ATOM slice)或者GPT12定时器。用户可以基于驱动程序配置实现多个通道,在每个通道上上层程序的可以执行以下操作:
- 启动/停止定时器
- 启用/禁用唤醒功能
- 启用/禁用回调通知
- 单次或连续操作模式
- 使用TOM切片实现的GPT Predef Timer功能。
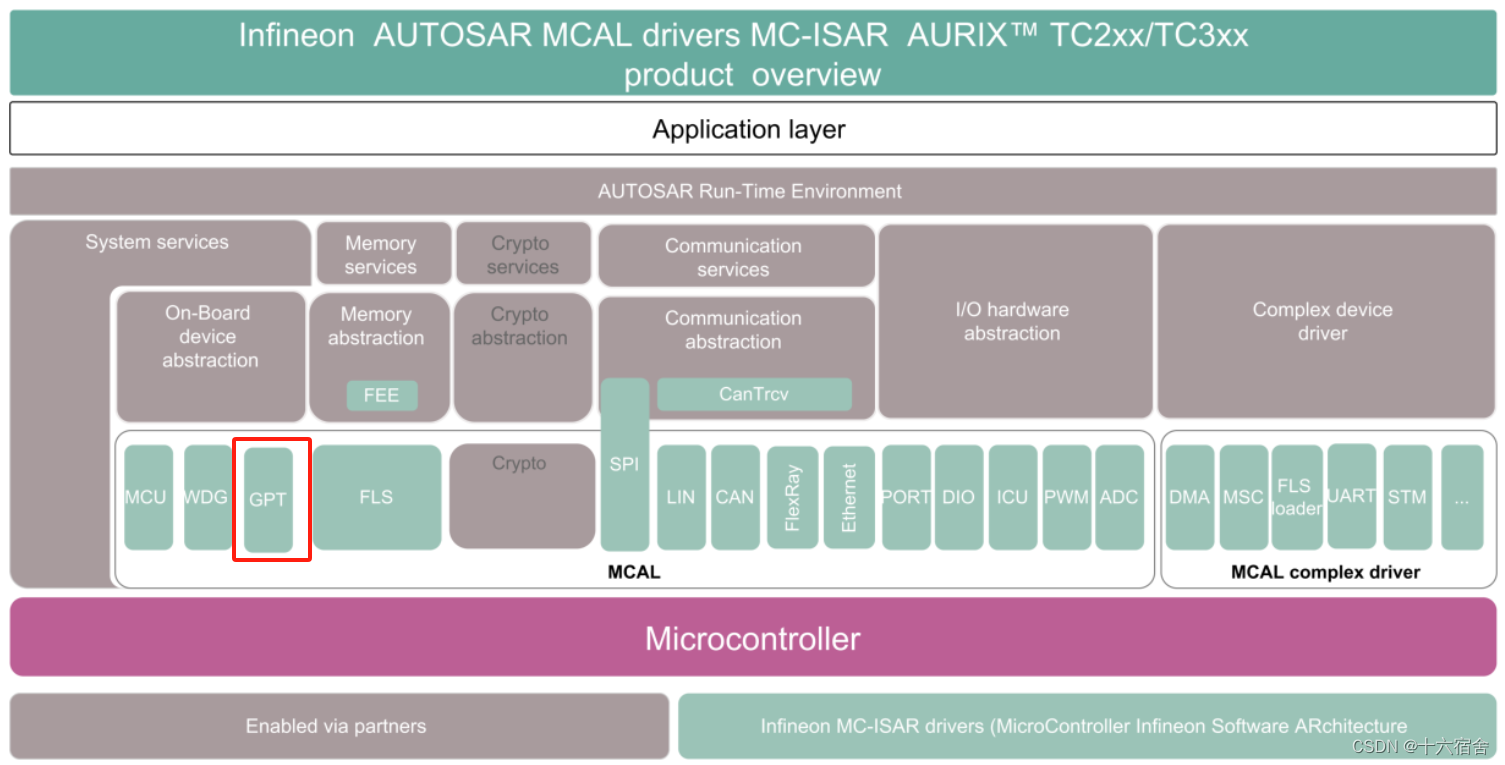
下图是英飞凌针对Autosar MCAL的架构实现,GPT位置如下。
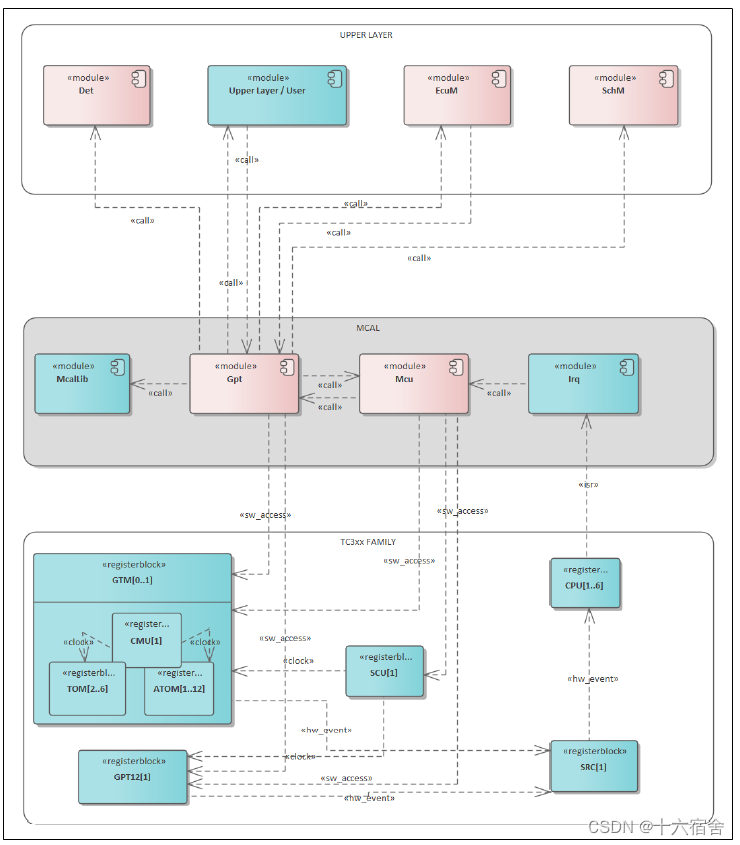
下图为GPT驱动模块的软硬件调用接口图。
GTM(Generic Timer Module)
GPT驱动利用GTM这个IP核提供的通道来实现连续定时模式、单次定时模式和预定义定时器。
连续和单次模式逻辑通道需要一个来自TOM(Timer Output Module)/ATOM(ARU-connected Timer Output Module)切片的定时器通道。预定义定时器仅使用GTM的IP核提供的TOM切片,因为TOM是16位定时器,跟24位定时器ATOM相比,它更容易实现通道的级联从而产生多种不同位数定时器的派生。举例说明,如果 fGTM 配置为可以直接推导特定的定时器所需的频率(如1us预定义定时器对应1MHz,100us 预定义定时器为10KHz),16位预置定时器只需要一个TOM 通道来实现n*1us/n*100us的定时器,则不需要TRIGOUT功能(通道级联),若fGTM配置为可以不能直接推导特定的定时器所需的频率,则首先由一个Tom通道来实现1us/100us的Tick频率,然后再级联下一个TOM通道来实现n*1us/n*100us的定时器。我们还可以利用这种TRIGOUT(级联)特性来使用多个TOM通道实现24位/32位定时器。
从上面可以得到结论,如果fGTM配置不能直接推导出定时器所需频率,且要实现一个24位/32位的定时器,那么我们需要3个通道,三个通道号需要按顺序依次递增。我们此次选用的GtmTimerUsed为GTMTom0Channel0。
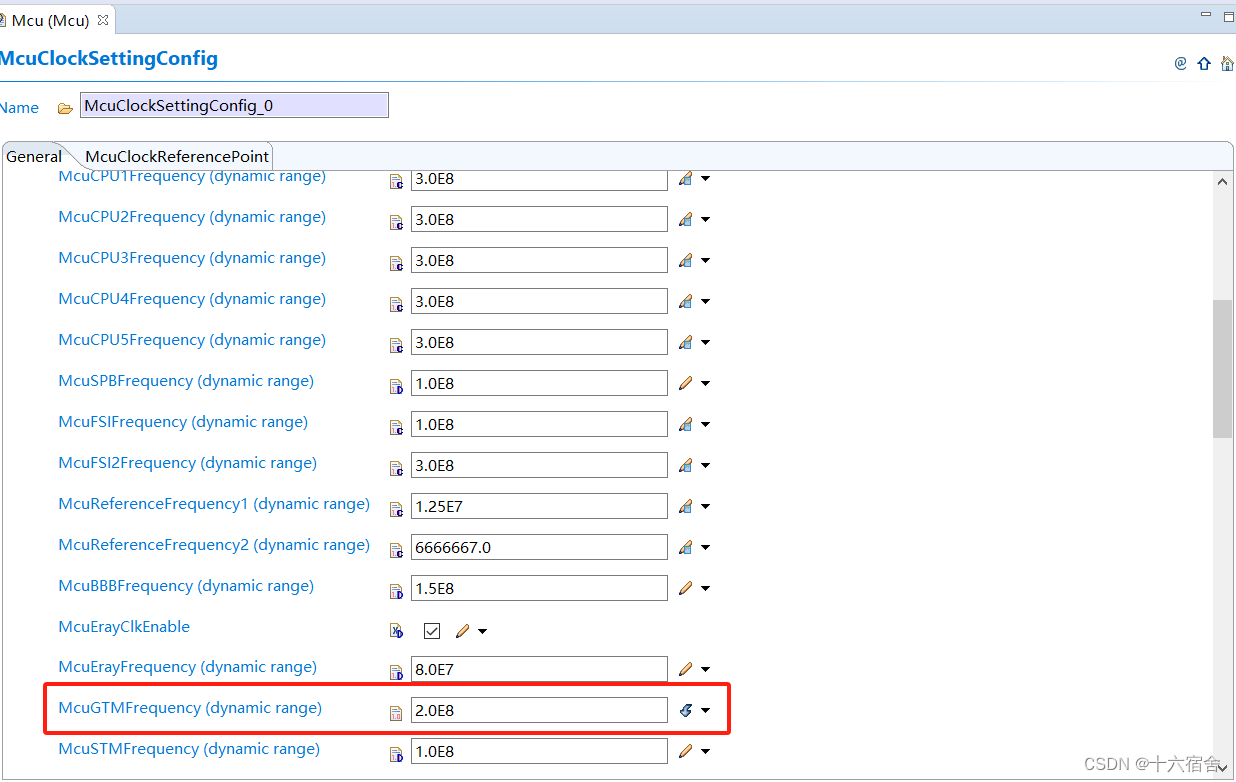
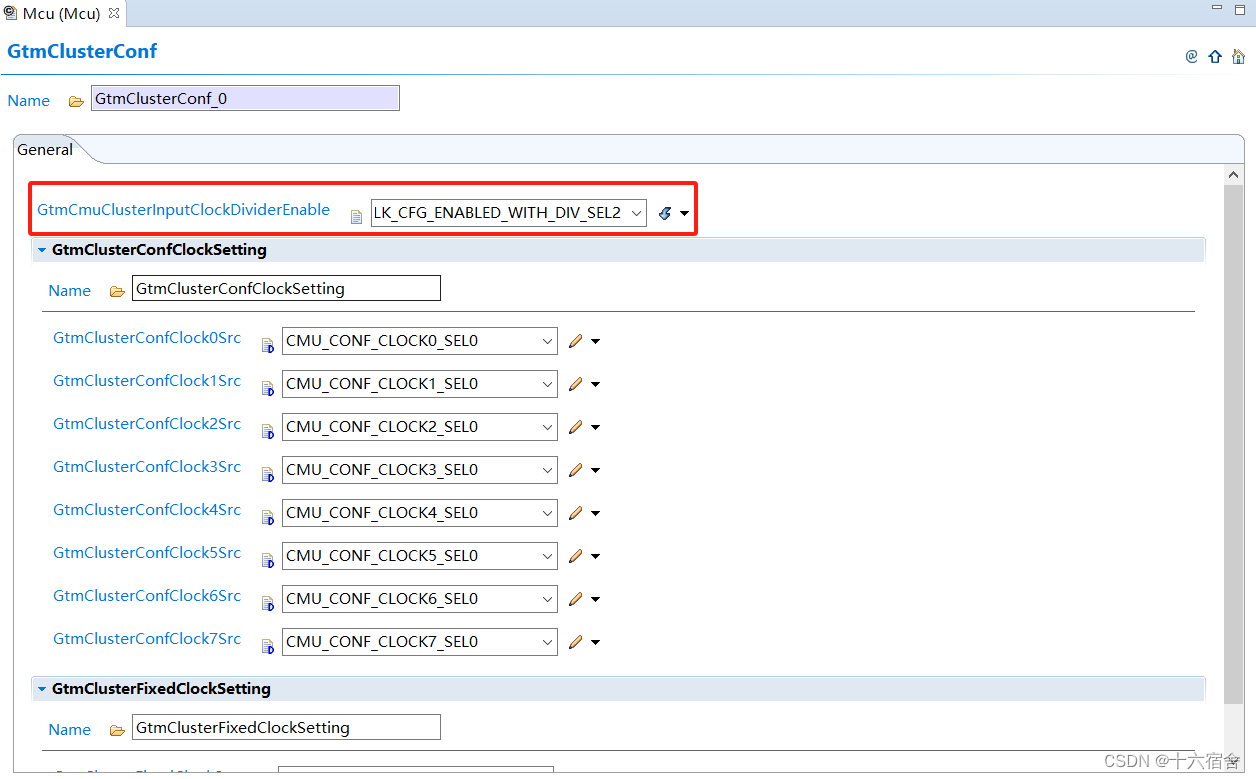
时钟方面,fGTM可在MCU模块中的McuPllDistributionSettingConfig进行直接配置(200Mhz),因为CMU(Clock Management Unit)属于Cluster0,所以可以在GtmClusterConf_0里对其进行分频(2分频)得到fCLS0。

然后需要在McuGtmClockManagementConf里配置分频的分子与分母(分别为1)得到CmuGlobalClock,然后选择FixedClock源时钟为CmuGlobalClock,这样我们就可以将FixedClock2作为GPT模块的GtmTimerClock。最终时钟的计算为((200Mhz/2)/2^4)=6250 000Hz,则要得到一毫秒的中断,超时的Tick数应为6250。

SCU(System Control Unit)
GPT驱动程序的时钟取决于SCU这个IP核。通用定时器需要fGTM和fSPB(System Peripheral Bus)时钟信号。
SCU为所有外设提供时钟,MCU驱动程序负责配置芯片时钟树。为避免因同时写入而发生冲突,使用MCALLIB提供的API执行对所有ENDINIT保护寄存器的更新。
GPT12
GPT驱动使用GPT12这个IP核实现连续定时器模式和单次定时器模式,其并不支持预定义模式。使用 GPT1 模块实现连续模式逻辑通道需要两个定时器,核心定时器T3和辅助定时器之一(T2或T4)。使用 GPT2 模块实现连续模式逻辑通道只需要T6(使用CAPREL寄存器作为重新加载寄存器)。单次模式逻辑通道的实现只需要来自 GPT1 或 GPT2 块中的一个计时器。
GP1(T2,T3,T4)的所有三个定时器可以配置成四种基本模式:定时器模式,门控定时器模式,计数器模式或者增量接口模式。
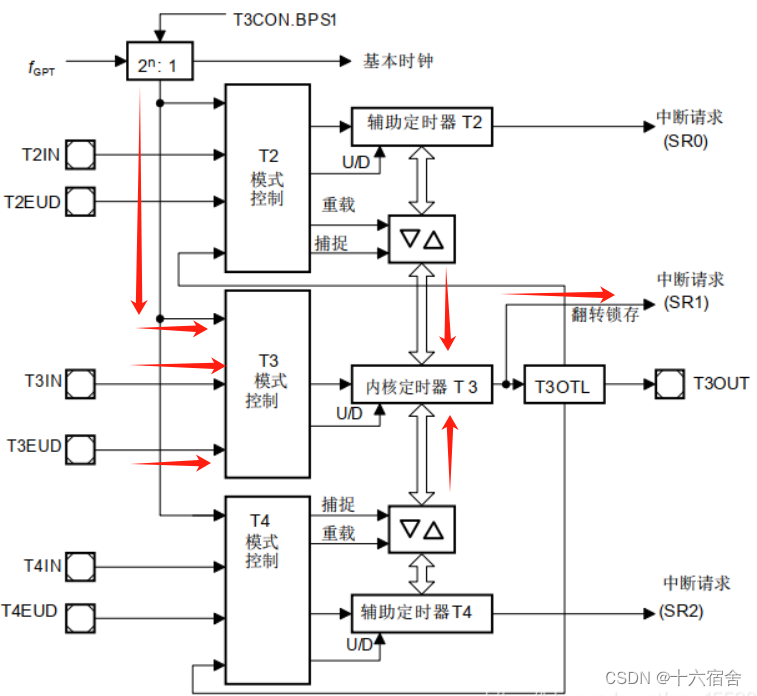
下面简单针对其几个输入/输出引脚做一下解释。
- TxIN:为门控模式下的门控信号(启动/停止计时)输入或者在计数器模式中用作输入。计数模式下可以通过T3CON寄存器中的位域T3I来控制输入上升沿计数还是下降沿。T3CON寄存器中的位域T3M可以选择定时器处于什么模式。
- TxEUD:计数方向( 上/下)通过外部上/下控制输入 TxEUD( 具有引脚功能)上的信号来动态改变 。
- 输出翻转锁存T3OTL :可指明内核定时器 T3 的上溢/下溢, 输出翻转锁存的状态在相关的引脚T3OUT(相关引脚功能) 上输出。
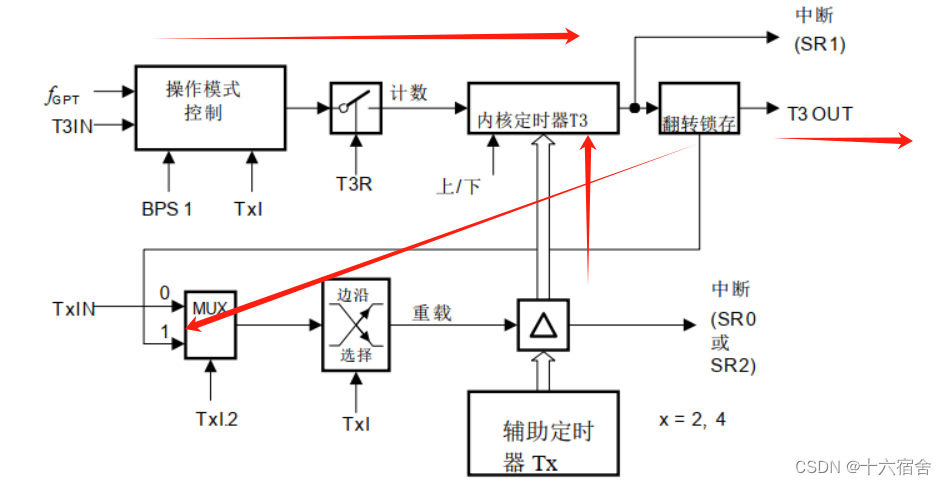
我们下边的例子实现的是连续定时器模式,所以用到了核心定时器T3和辅助定时器T2,T2用于重载核心定时器T3,T3的翻转锁存状态触发辅助定时器作为其T3的重载寄存器使用。辅助寄存器还可以作为捕获寄存器使用,在TxIN电平翻转的时候获取内核定时器的值。
环境与目标
本文使用的为英飞凌提供的开发板KIT_A2G_TC397XA_TFT,芯片为TC397,外部的时钟为20Mhz。

涉及的软件如下。
- EB-tresos:用于生成动态代码,具体工程搭建参考《【AUTOSAR MCAL】MCAL基础与EB tresos工程新建》。
- HighTech:用于编译生成elf文件,具体的工程搭建参考《【MCAL】HighTec集成TC3xx对应MCAL的Demo》。
- UDE 5.2:用于下载和调试程序。
涉及的参考文档如下表。
| 序号 | 参考资料 | 内容 |
| 1 | 《Infineon-AURIX_TC39x-UserManual-v02_00-EN》 | 英飞凌TC39x用户手册 |
| 2 | 《ApplicationKitManual-TC3X7-ADAS-V21.pdf》 | 开发板KIT_A2G_TC397XA_TFT说明 |
| 3 | 《MC-ISAR_TC3xx_UM_Gpt.pdf》 | 英飞凌提供的TC39x芯片Gpt用户手册 |
配置目标如下:
- 使用GPT实现1ms的定时器中断,在中断处理函数中累加值,用作系统时标。
- 使用GPT12实现2ms定时器中断,在中断处理函数中翻转I/O口状态。
EB-tresos配置GPT实现1ms定时器
MCU配置
配置GTM外设为200Mhz频率。
GTM配置
GtmClusterConf_0
配置fCLS0为fGTM的二分频,即为100Mhz。
GtmGlobalConfiguration
配置CMU的全局频率等于fCLS0(100Mhz),公式为![]() 。然后选择CMU的FixedClock来源为CMU的全局频率。
。然后选择CMU的FixedClock来源为CMU的全局频率。

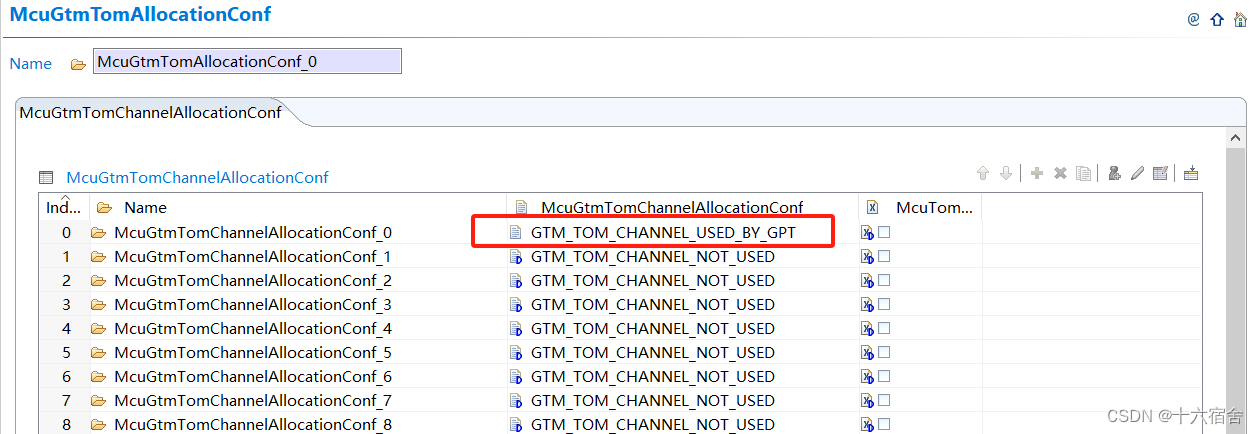
McuGtmTimChannelAllocationConf
最后配置Tom0的Channel0用作GPT使用。
GPT配置
General
配置GPT模块General部分,需要我们注意的配置项有以下几个。
- GptEnableDisableNotificationApi:使能回调函数的API,此处属于下面回调函数配置的开关。
- GptTimeElapsedApi:已经运行时间的计数,例如本例子的1ms假设运行了0.3ms,这个API返回值为0.3ms的Ticks。
- GptTimeRemainingApi:剩余时间的计数,例如本例子的1ms假设运行了0.3ms,这个APl返回值为剩余0.7ms的Ticks.

GptChannelConfiguration
这里需要注意的配置有以下几个。
- GptAssignedHwUnit:选择硬件时钟是GTM还是GPT12。
- GptChannelMode:运行模式是连续还是单次触发。

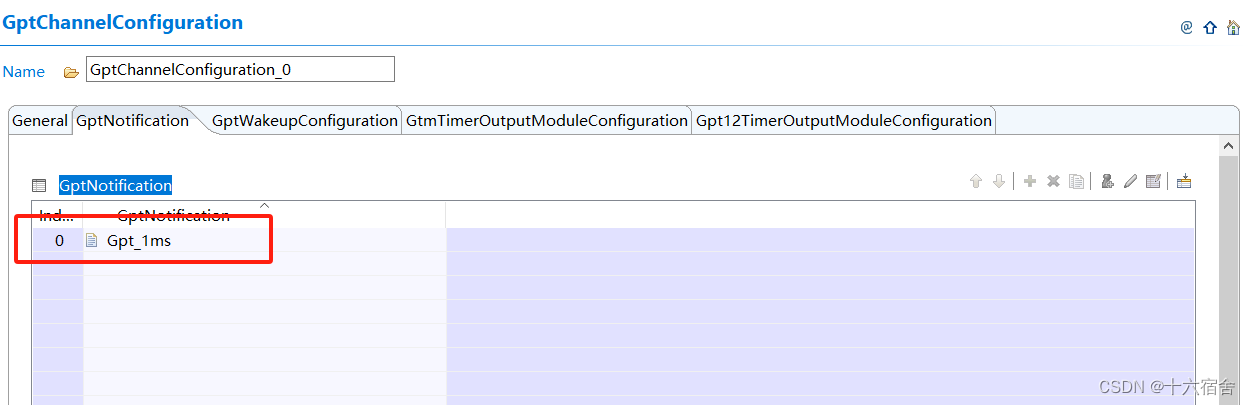
GptNotification
中断函数命名为Gpt_1ms。
GtmTimerOutputModuleConfiguration
选择GTM使用的Timer为Tom1Channel0。时钟源选择CMU输出的Fixed_Clock_1。

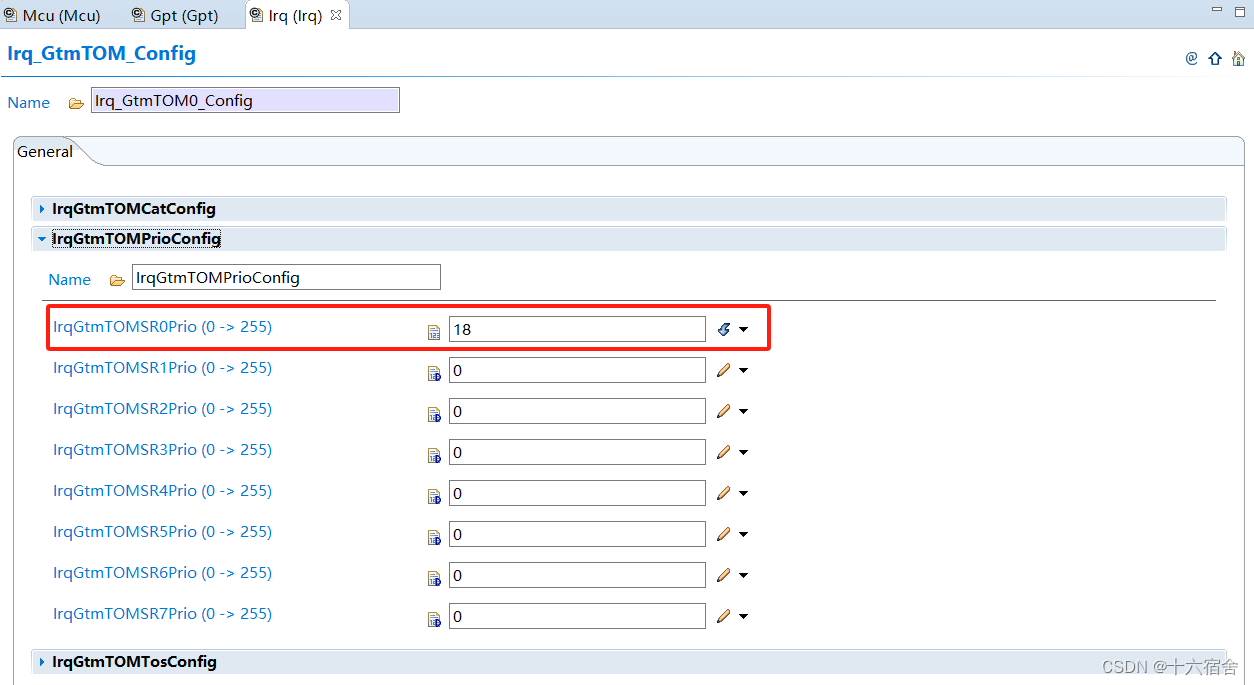
IRQ配置
可以看到TOM0的channel0中断输出使用的是SR0。
ResourceM配置
分配核0使用资源,添加GPT:GptChannelConfiguration_0。

GPT驱动使用与调试
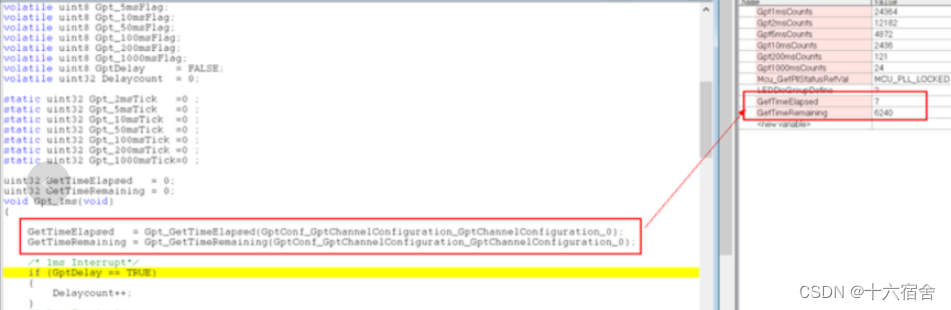
首先,实现一个名为Gpt_1ms函数(形参和返回值均为Void)。
/**
* @brief 系统时标更新
*
* @param[in] none
* @param[out] none
*
* @return none
*/
void Gpt_1ms(void)
{
GetTimeglapsed = Gpt_GetTimerlapsed(GptConf_GptChannelConfiguration_GptChannelConfiguration_0);
GetTimePemsining = Gpt_GetTimeFemaining(GptConf_GptChannelConfiguration_GptChannelConfiguration_0);
/* 1ms Interrupt */
if(GptDelay == TRUE)
{
Delaycount++;
}
mcal_tick_cnt++;
}然后将MCAL的示例中的Gtm_Ir与Demo_Gpt添加到工程中。
在初始化过程中调用GPT_Demo()即可完成GPT的初始化。

记住按照计算的数值修改定时器溢出时的值为6250。
LOCAL_INLINE void Gpt_lStartDemo(void)
{
/* Enable notification for Timer channel 0 */
Gpt_EnableNotification(0);
/* 16 bit max value in GPT12 timer */
Gpt_StartTimer(0,6250U);
}最后使用UDS下载程序到板卡中,在中断函数中打断点能正常进入。
EB-tresos配置GPT实现2ms定时翻转I/O口
MCU配置
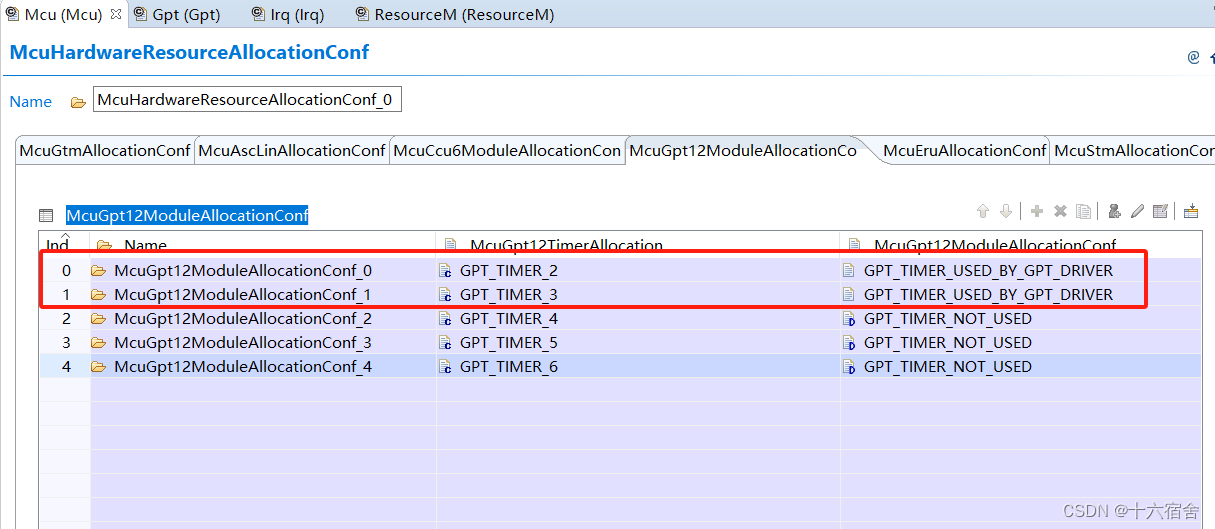
McuGpt12ModuleAllocationConf
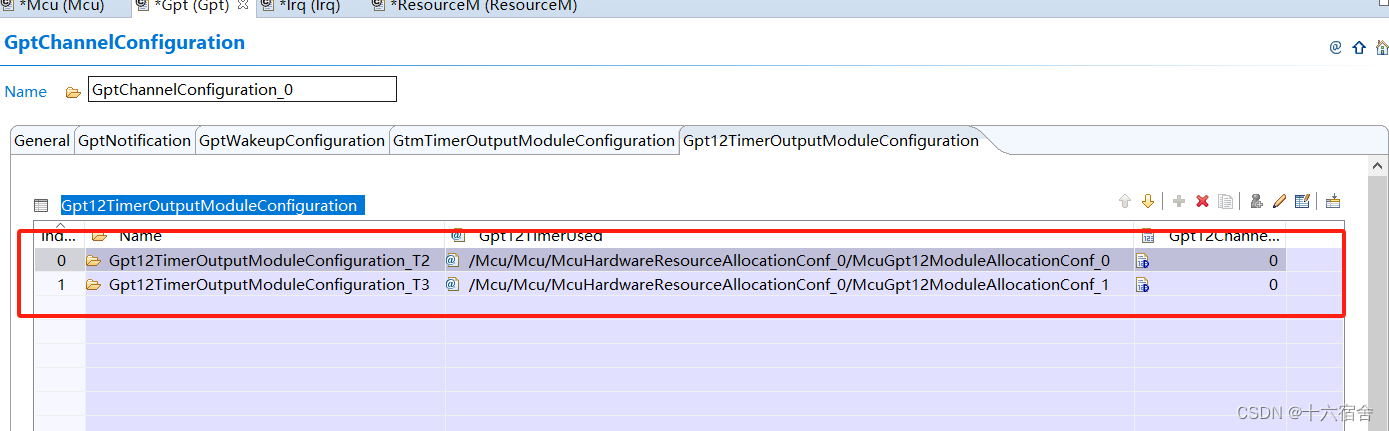
将辅助定时器T2与主定时器T3设置为GPT驱动。
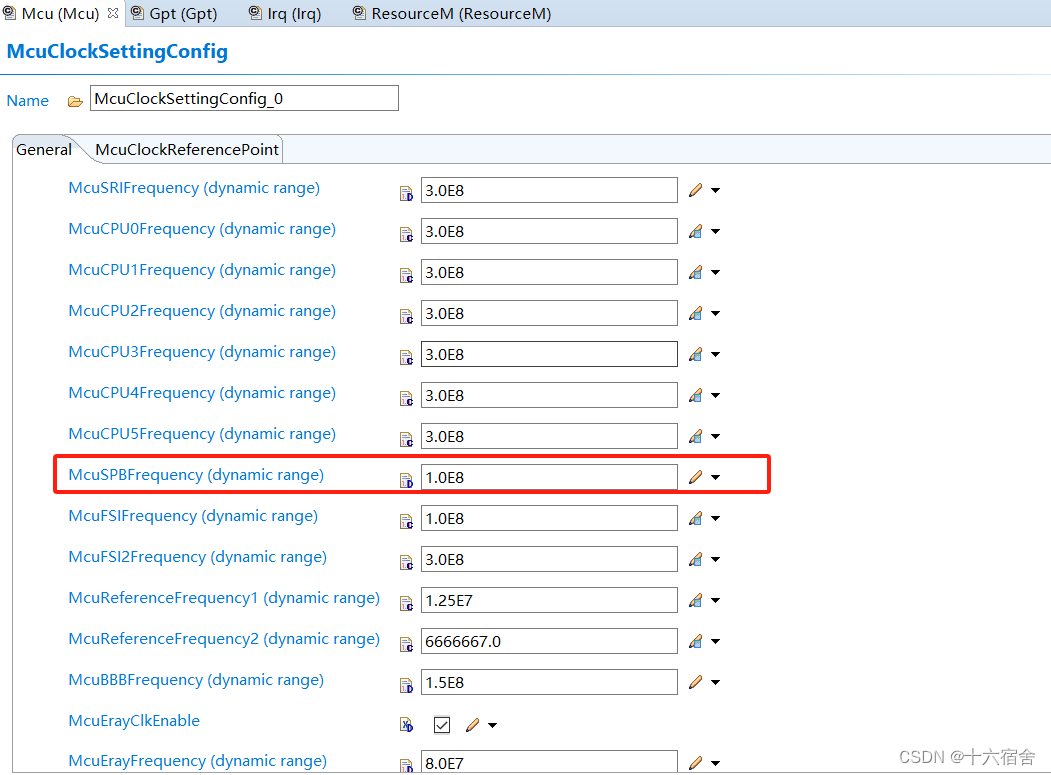
McuPllDistributionSettingConfig
因为fGPT = fSPB,所以配置fSPB为100Mhz。
McuGpt12PrescalerConf
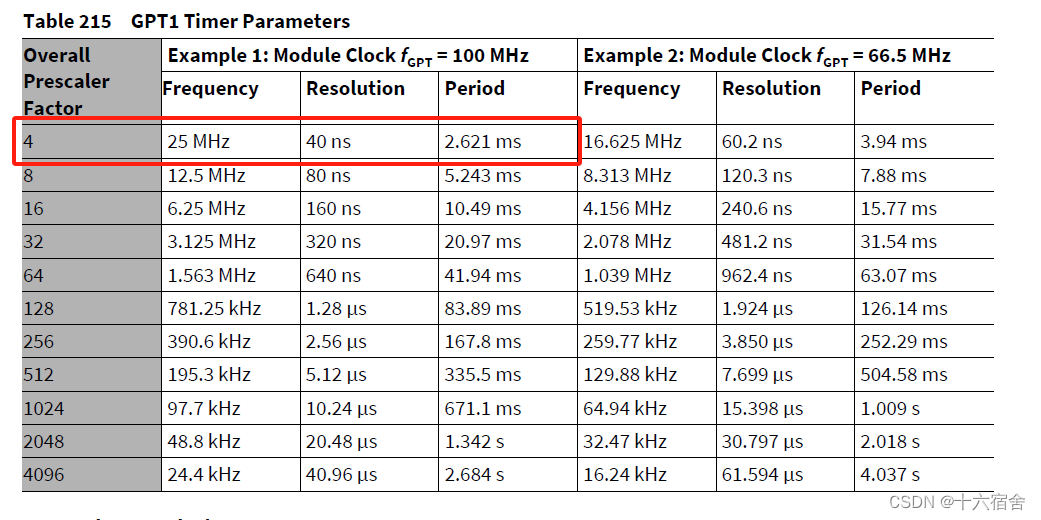
配置GPT1的分频值。

根据手册,此处至少为4,经过如此的配置之后,GPT1的时钟参数如下图所示。
GPT配置
GptChannelConfiguration
选择GPT12作为GPT的硬件实现单元。

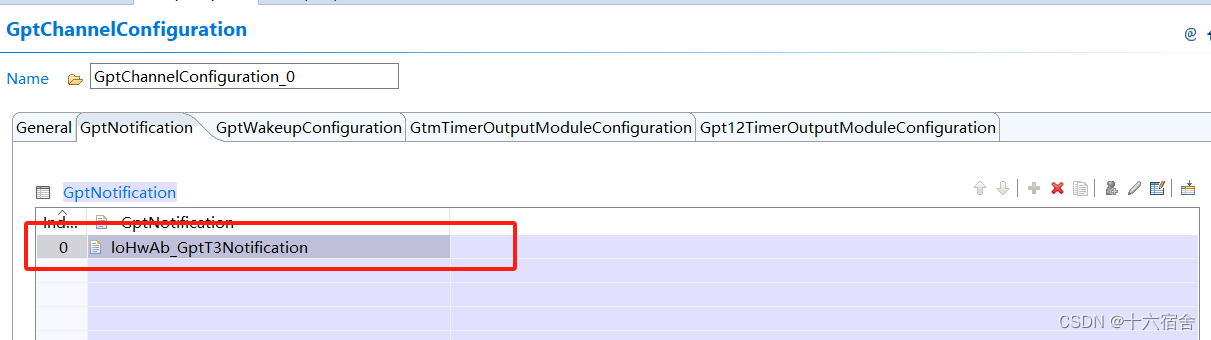
GptNotification
定义中断回调函数的名称为loHwAb_GptT3Notification。
Gpt12TimerOutputModuleConfiguration
IRQ配置
配置T3的中断优先级为19。

GPT12驱动使用与调试
首先,初始化部分我们要使能中断并且开启回调函数。
/*gpt12 irq*/
SRC_GPT120T3.B.SRE = 1;
Gpt_EnableNotification(GptConf_GptChannelConfiguration_GptChannelConfiguration_GPT12);
Gpt_StartTimer(GptConf_GptChannelConfiguration_GptChannelConfiguration_GPT12, 50000);
Mcu_17_Gpt12_TimerStart(MCU_GPT12_TIMER3);这里为什么Timer溢出的值为50000,是因为前面MCU阶段配置了4分频SPB为100Mhz。
那么100 000 000/4 = 25 000 000,即每秒运行Ticks为25 000 000,则2ms运行为25 00 000 / 1000* 2 = 50 000。
中断回调代码如下。
void IoHwAb_GptT3Notification(void)
{
Dio_FlipChannel(DioConf_DioChannel_DioChannel_Flip);
}最终测量IO口的翻转结果如下。

十六宿舍 原创作品,转载必须标注原文链接。
©2023 Yang Li. All rights reserved.
欢迎关注 『十六宿舍』,大家喜欢的话,给个👍,更多关于嵌入式相关技术的内容持续更新中。