1. 前言
迷宫问题是一类常见的问题。
初识此类问题,应该是“见山是山”,理解问题的原始要求,便是查找从起点到终点的可行之路。
有了广泛的知识体系之后,应该是"见山不是山"。会发现迷宫就是邻接矩阵,树和图中顶点的关系常用邻接矩阵描述,所以,迷宫问题可以转化为树、图的搜索问题。或帮助理解树和图,反之也可在迷宫问题中用树、图中的理论。
最后便是“见山还是山”,能透过问题的表象,深化问题的本质,识破披着各色外衣的迷宫问题。
本文从不同的角度、全方位讲透迷宫问题中的“见山不是山”,让大家对迷宫问题有实质性的理解。
2. 迷宫问题
问题描述:
如下图迷宫地图中,1表示障碍物,0表示可通行。要求从起始点(0,0)出发,检查是否有行之有效的通路,可以一直走到终点(8,8)。迷宫问题的本质就是邻接矩阵的路径搜索问题。
常用的是广度优先和深度优先搜索算法。

2.1 设计数据类型
首先分析迷宫问题中的数据类型。
- 坐标类型:用来描述迷宫中每个单元格的位置。
/*
*坐标类型
*/
struct Position {
//x坐标
int x;
//y坐标
int y;
Position() {}
//构造函数
Position(int x,int y) {
this->x=x;
this->y=y;
}
//重载 == 运算符
bool operator==(Position pos) {
return this->x==pos.x && this->y==pos.y;
}
//输出
void desc() {
cout<<"(x:"<<x<<",y:"<<y<<")"<<"->";
}
};
- 方向类型:描述与每个单元格相邻的上、下、左、右
4个单元格的关系。
/*
* 方向增量
*/
struct Direction {
//x 方向增量
int xOffset;
//y 方向增量
int yOffset;
};
- 迷宫类:描述
迷宫本身以及迷宫相对应的操作函数。
class Maze {
private:
//一般用二维数组存储迷宫信息
int maze[10][10]= {
{1,1,1,1,1,1,1,1,1,1},
{1,0,0,1,0,1,1,1,1,1},
{1,1,0,1,0,0,1,1,1,1},
{1,1,0,1,0,0,0,0,1,1},
{1,1,0,0,0,0,1,0,1,1},
{1,1,1,1,0,0,1,0,1,1},
{1,1,0,0,0,0,1,0,1,1},
{1,1,1,1,0,0,1,0,1,1},
{1,1,0,0,0,1,1,0,0,1},
{1,1,1,1,1,1,1,1,1,1},
};
//地图中非障碍点,即值为 0 位置的个数
int count=32;
//当前坐标与相邻(右、下、左、上)坐标的增量关系
Direction dirs[4]= { {0,1},{1,0},{0,-1},{-1,0} };
//栈,用于深度搜索
stack<Position> mazeStack;
//队列,用于广度搜索
queue<Position> mazeQueue;
//总路径数
int totalCount=0;
public:
//构造函数
Maze() {}
/*
*洪水填充算法检查迷宫的连通性
*/
void floodfill(Position start,Position end);
/*
* 是否连通
*/
void isConnection();
/*
* 非递归实现路径的查找
* 只保证查找到路径
* 需要借助栈
*/
void searchPathByStack(Position start,Position end);
/*
* 显示到深度搜索到的路径
*/
void showPath();
/*
*递归深度搜索
*/
bool searchPathByRecursion(Position start,Position end,int deep);
/*
*广度搜索
*/
void searchPathByQueue(Position start,Position end);
/*
* 显示地图
*/
void showMap() {
cout<<"\n\t----------------------地图----------------------\n"<<endl;
for(int i=0; i<10; i++) {
for( int j=0; j<10; j++ )
cout<<this->maze[i][j]<<"\t";
cout<<endl;
}
cout<<"\n\t--------------------------------------------"<<endl;
}
};
2.2 检查连通性
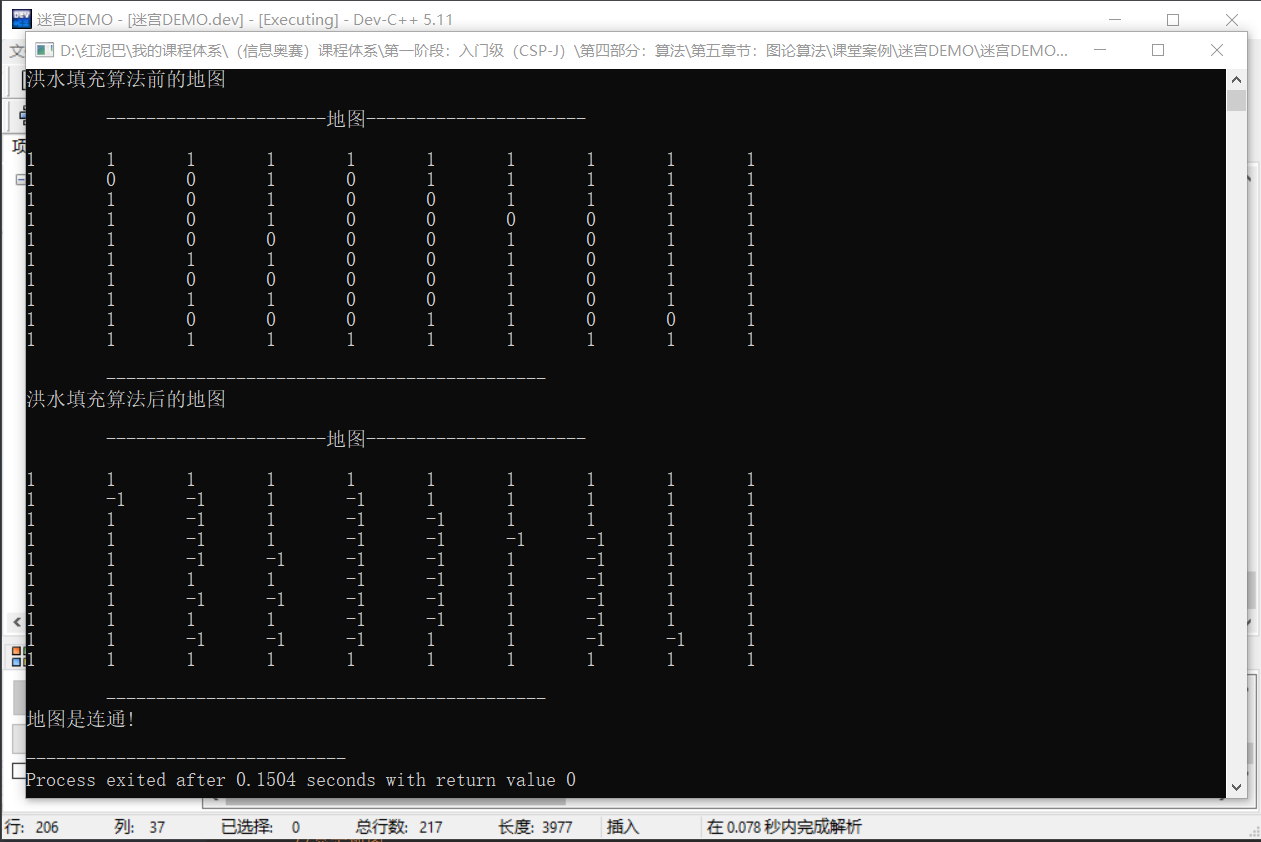
使用洪水填充算法检查迷宫的连通性。
洪水填充算法类似于古时候的"连坐法",或说星星之火可以燎原也,从最初给定的位置开始,以蔓延之势,用-1填充与之相邻且值为 0的单元格。 本文中, -1和0都用于表示迷宫中的非障碍物区间。
洪水填充算法和后面的递归搜索算法相似,不同地方之处,洪水填充会蔓延至所有满足条件的位置,搜索则是强调到通向目标的路径。
/*
* 洪水填充算法检查迷宫的连通性
*/
void Maze::floodfill(Position start,Position end) {
Position tmpPos;
//检查起始点周边的点是否存在
for(int i=0; i<4; i++ ) {
//当前点上、下、左、右的相邻点
tmpPos.x=start.x+ dirs[i].xOffset;
tmpPos.y=start.y+dirs[i].yOffset;
if( maze[tmpPos.x][tmpPos.y]==0 ) {
//可通,则填充为 -1
maze[tmpPos.x][tmpPos.y]=-1;
//计数
count--;
//递归调用
Maze::floodfill(tmpPos,end);
}
}
}
连通性结论:
/*
* 如果洪水填充算法所填充的单元格数量和初始时值为 0 的单元格的数量一样,则连通
*/
void Maze::isConnection() {
if(Maze::count==0)
cout<<"地图是连通!"<<endl;
else
cout<<"地图不是连通的!"<<endl;
}
测试:
//需要的所有头文件
#include <iostream>
#include <stack>
#include <vector>
#include <queue>
using namespace std;
int main(int argc, char** argv) {
Maze maze;
//起点位置
Position startPos(1,1);
//终点位置
Position endPos(8,8);
cout<<"洪水填充算法前的地图"<<endl;
maze.showMap();
//洪水填充算法
maze.floodfill(startPos,endPos);
cout<<"洪水填充算法后的地图"<<endl;
maze.showMap();
//结论
maze.isConnection();
return 0;
}
输出结果: 迷宫中值为0的位置全部被-1填充。
2.3 深度搜索
深度搜索可以使用非递归和递归 2 种方案实现。
2.3.1 非递归的思想
非递归深度搜索需要借助栈。
- 初始,把
起始点的坐标值压入栈中。
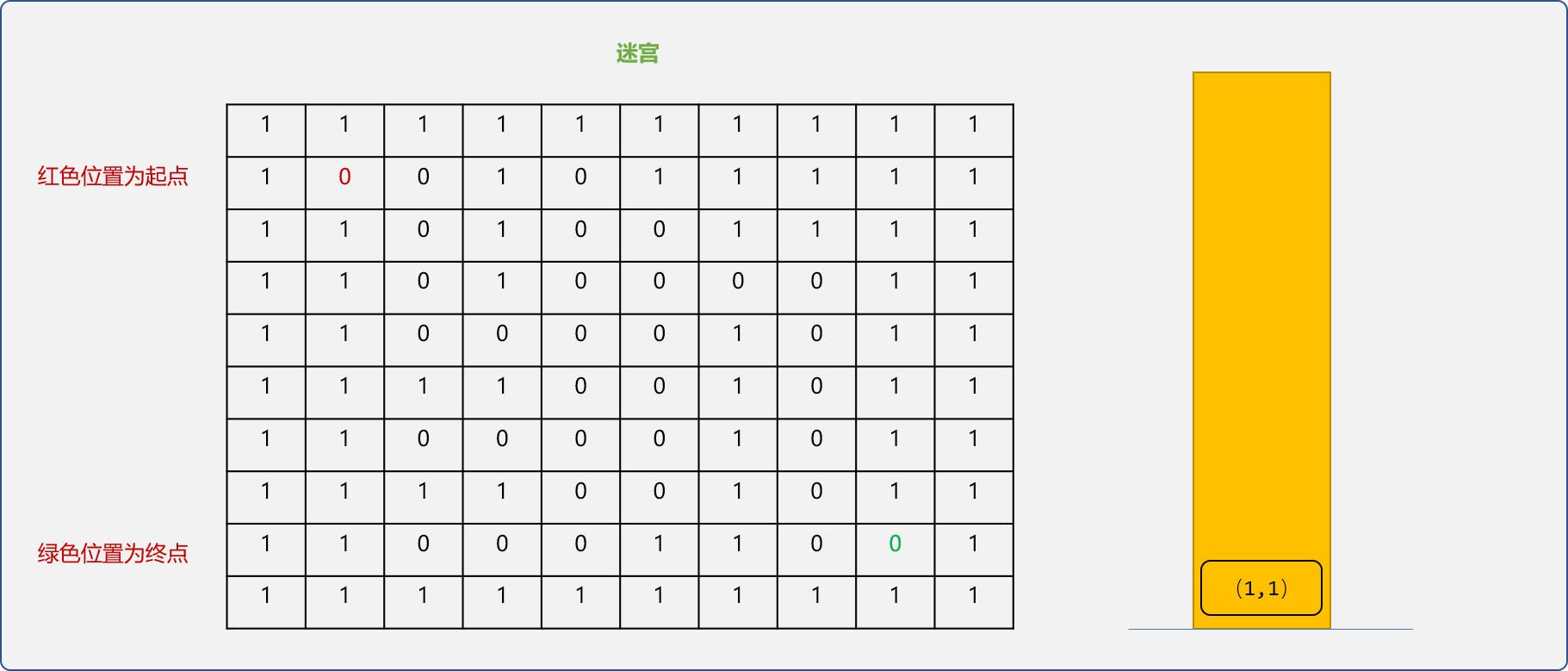
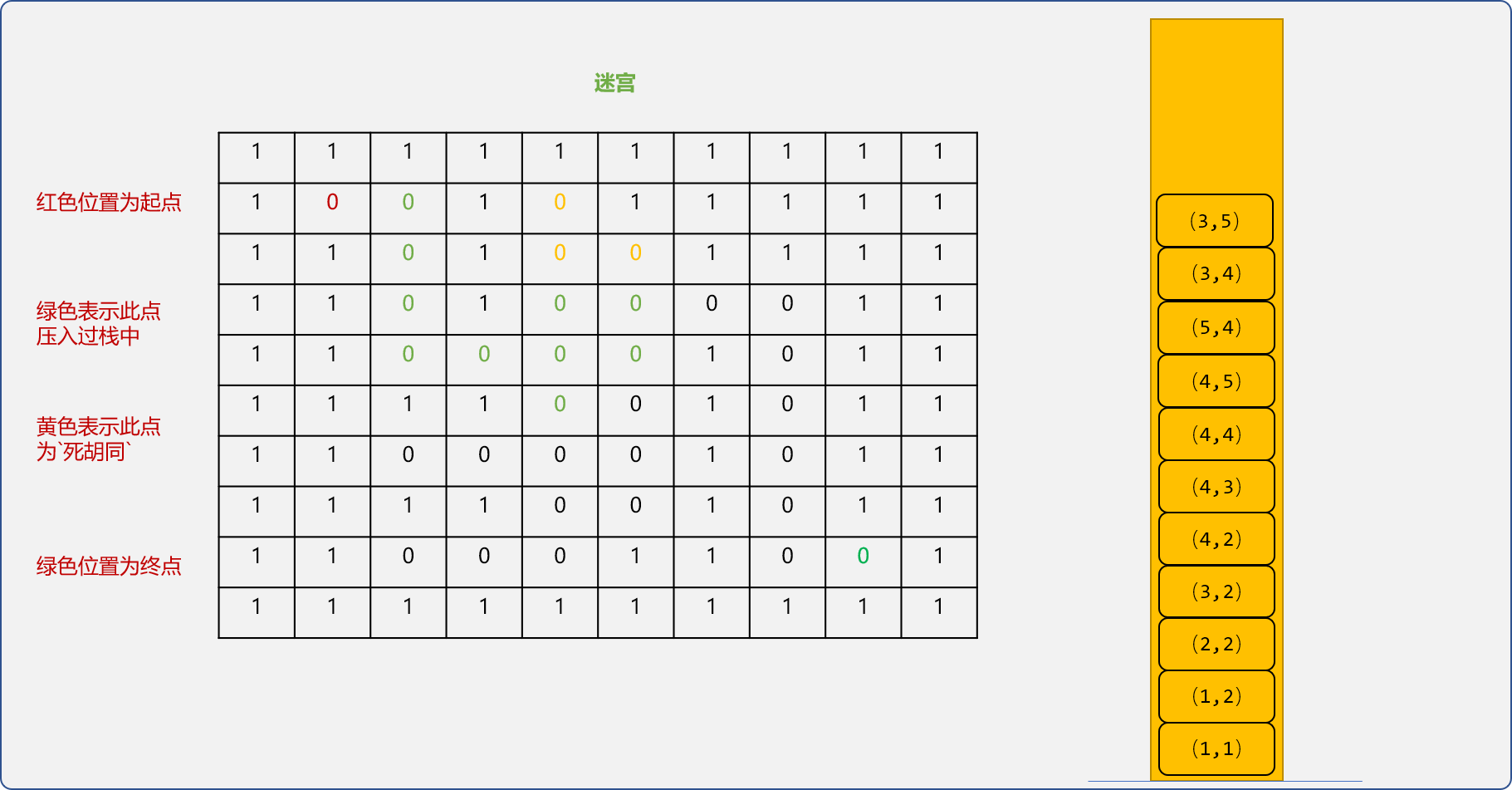
- 获取栈顶的坐标,检查此坐标的
上、下、左、右 4个相邻的坐标是否可通行。如果可通行,则压入栈中,且标识此坐标已经访问过。如下图使用绿色表示已经访问过。
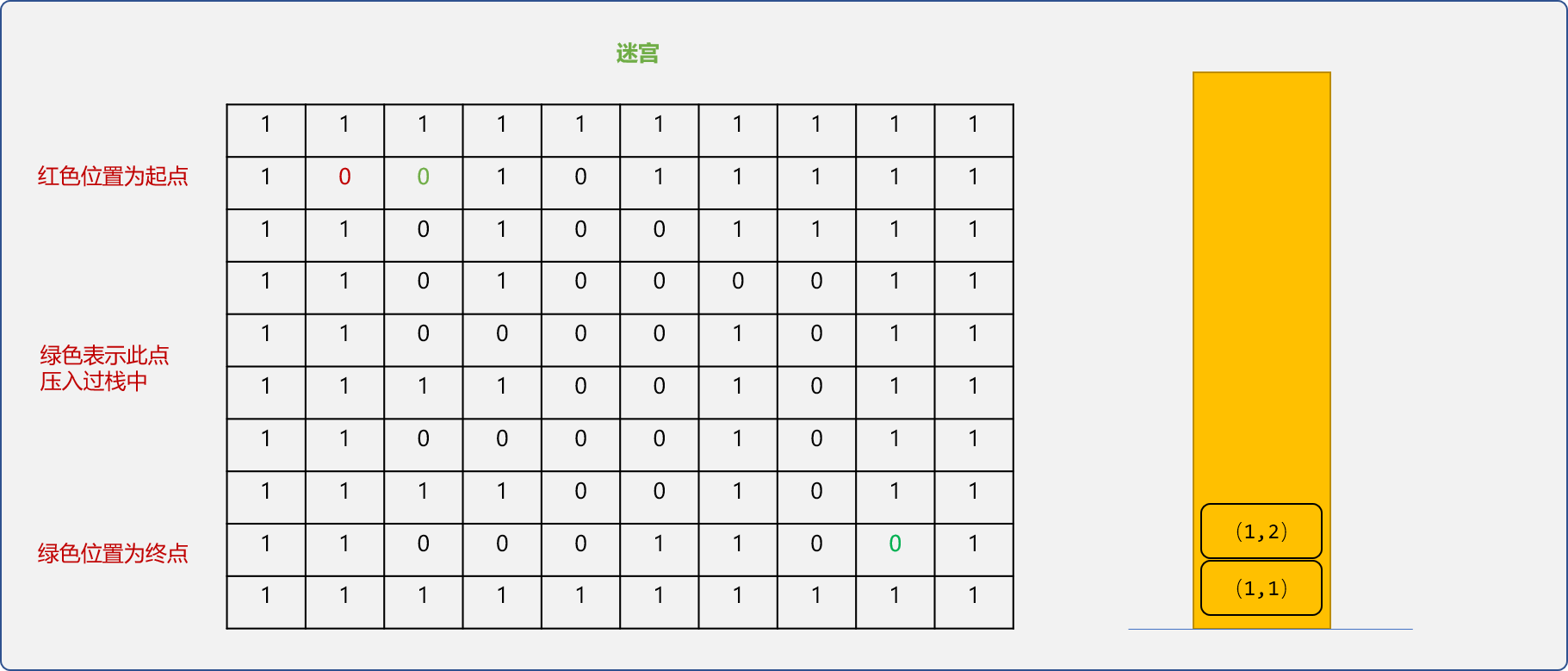
- 重复上述的的逻辑,如下图当是添加到
(4,4)单元格时栈中的内容。

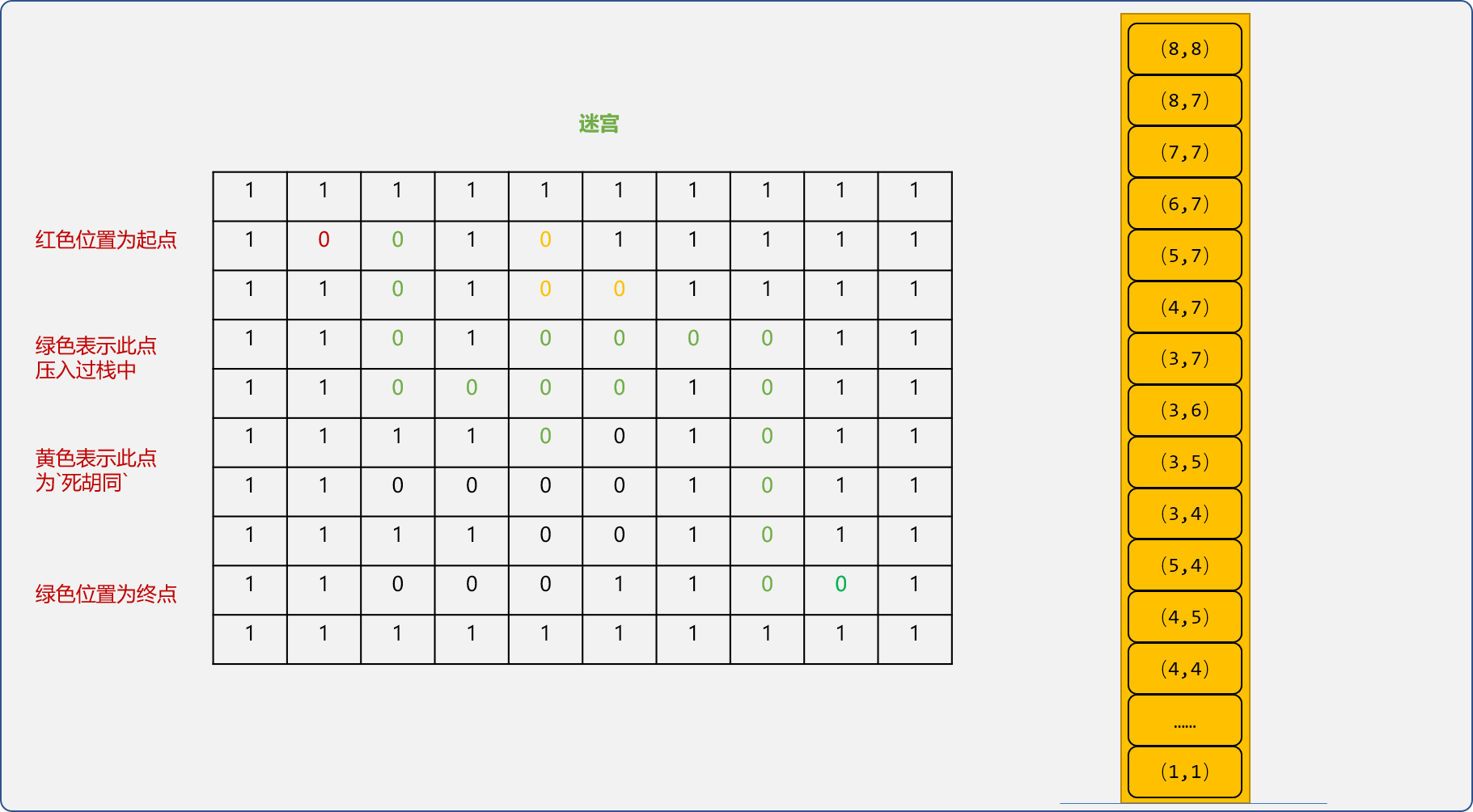
- 与
(4,4)相邻的坐标分别是(4,5)、(5,4)、(4,3)、(3,4)。其中(4,3)已经访问过,则不需要再压入。栈中的坐标都是一路搜索下来可通行的位置。

-
继续获取栈顶坐标
(3,4)。随后找到与之相邻的(3,5)、(2,4),压入栈中;再得到栈顶的(2,4)坐标,并找到与之相邻的(2,5)、(1,4)。Tips: 本文查找与栈顶坐标相邻的坐标是按
右、下、左、上的顺序。如果顺序不同,则会导致搜索过程不一样。

- 从栈顶得到
(1,4),因此坐标位于死胡同。于是,从栈顶把此坐标删除。可得到一个结论,不是所有进入栈中的坐标都有机会成为有效路径中的一份子。本文称行之此处不通的坐标为死胡同坐标,也做相应的标记。也就是说,当坐标为死胡同坐标时,则从栈顶删除。
- 栈中的
(2,5)、(2,4)为死胡同坐标,删除。
- 从
(3,5)坐标开始,可以一路走到终点。把栈中的坐标全部输出便得到起点到终点的有效路径。
这里有一个问题要思考,栈中的值真的全是有效路径上的坐标?
其实不然,也许有些坐标进入栈中,只为备用。如到(4,4)位置时,有 3 个可行方向(4,5)、(5,4)、(3,4)。因(3,4)这个方向可行,最终(4,5)、(5,4)备用点没用上。所以,这些坐标也需要标记一下,本文称为备用坐标。
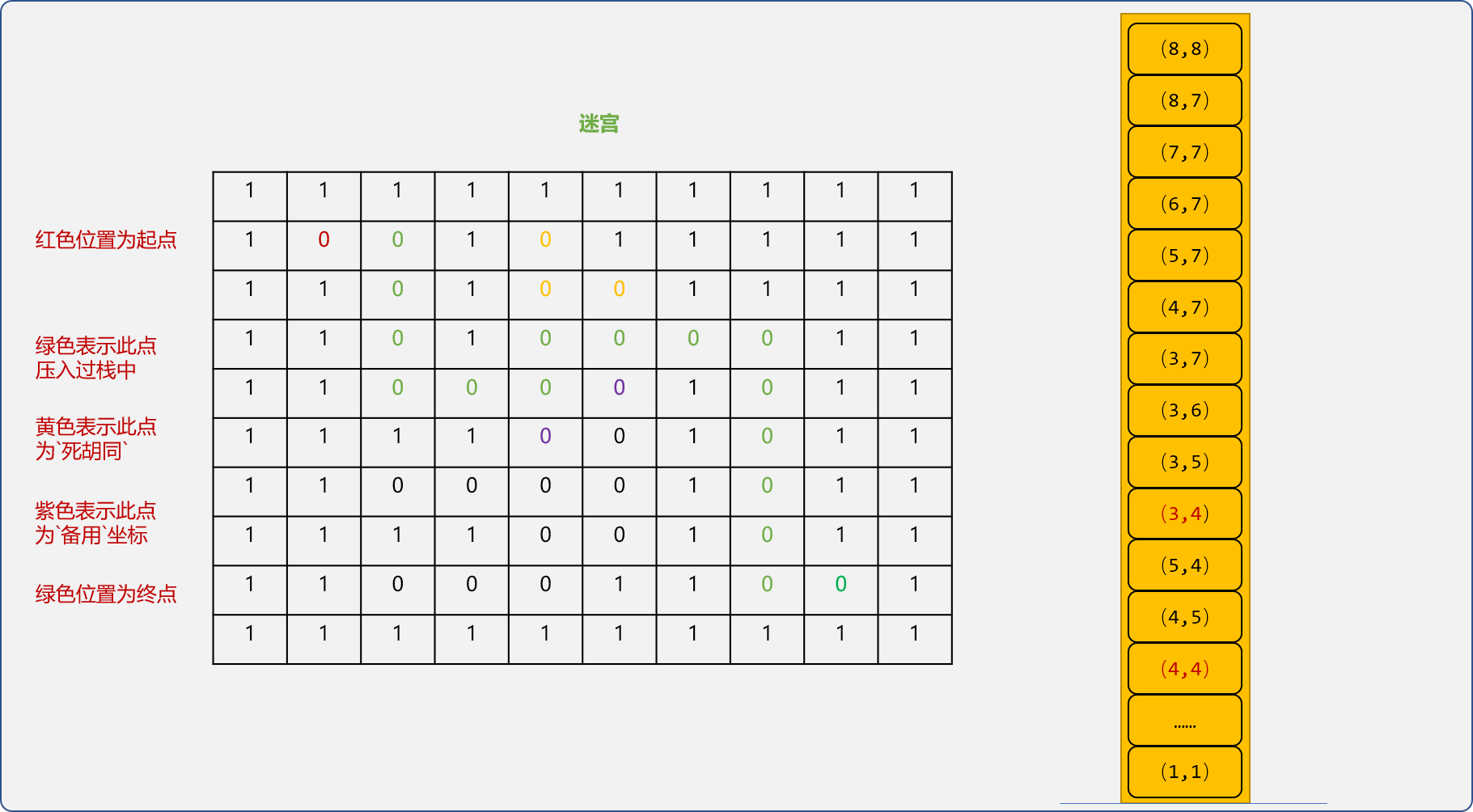
对坐标进行不同颜色标记后,上图中的绿色坐标为最终有效路径。
2.3.2 编码实现
/*
* 非递归实现路径的查找
* 只保证查找到路径
* 需要借助栈
*/
void Maze::searchPathByStack(Position start,Position end) {
//把起始点压入栈
Maze::mazeStack.push(start);
//置 0,表示已经访问过
Maze::maze[start.x][start.y]=0;
Position top;
Position tmpPos;
while(1) {
//得到栈顶的元素
top=Maze::mazeStack.top();
// -2 表示此坐标是路径中的一部分
Maze::maze[top.x ][top.y ]=-2;
if(top==end) {
return;
}
bool isConnection=false;
//检查栈顶元素的周边点
for(int i=0; i<4; i++) {
tmpPos= { top.x+dirs[i].xOffset,top.y+dirs[i].yOffset };
//检查是否可通,-1 表示可通
if( Maze::maze[tmpPos.x ][tmpPos.y ]==-1 ) {
isConnection=true;
//压入栈
Maze::mazeStack.push(tmpPos);
//经访问过
Maze::maze[tmpPos.x][tmpPos.y]=0;
}
}
if(!isConnection) {
//此点周边不能通用,从栈顶删除
Maze::mazeStack.pop();
//-3 表示死胡同坐标
this->maze[top.x ][top.y ]=-3;
}
}
}
/*
*输出路径中的坐标
*
*/
void Maze::showPath() {
cout<<"非递归查找到的路径:"<<endl;
stack<Position> paths;
Position pos;
while(!Maze::mazeStack.empty()) {
pos=Maze::mazeStack.top();
Maze::mazeStack.pop();
if( this->maze[pos.x][pos.y]==-2 )
paths.push(pos);
}
//正序输出
while(!paths.empty()) {
pos=paths.top();
paths.pop();
pos.desc();
}
cout<<endl;
}
测试:
int main(int argc, char** argv) {
Maze maze;
//起点位置
Position startPos(1,1);
//终点位置
Position endPos(8,8);
//省略……
//非递归搜索路径
maze.searchPathByStack(startPos,endPos) ;
maze.showPath();
maze.showMap();
return 0;
}
输出结果: 下图中的-2所示的坐标为有效路径描述。-3曾经进入过栈,但是死胡同坐标。0 表示没有用上的备用坐标。

2.4 递归实现
可以使用递归回溯,找出所有的路径。
/*
*递归查找路径
*/
bool Maze::searchPathByRecursion(Position start,Position end,int deep) {
Maze::maze[start.x][start.y]=deep;
//是否是死胡同坐标
bool isConnection=false;
Position tmpPos;
//查找相邻坐标
for(int i=0; i<4; i++ ) {
//相邻坐标
tmpPos= { start.x+dirs[i].xOffset,start.y+dirs[i].yOffset };
if( Maze::maze[tmpPos.x][tmpPos.y]==-1 ) {
//可访问
isConnection=true;
Maze::maze[tmpPos.x][tmpPos.y]=deep;
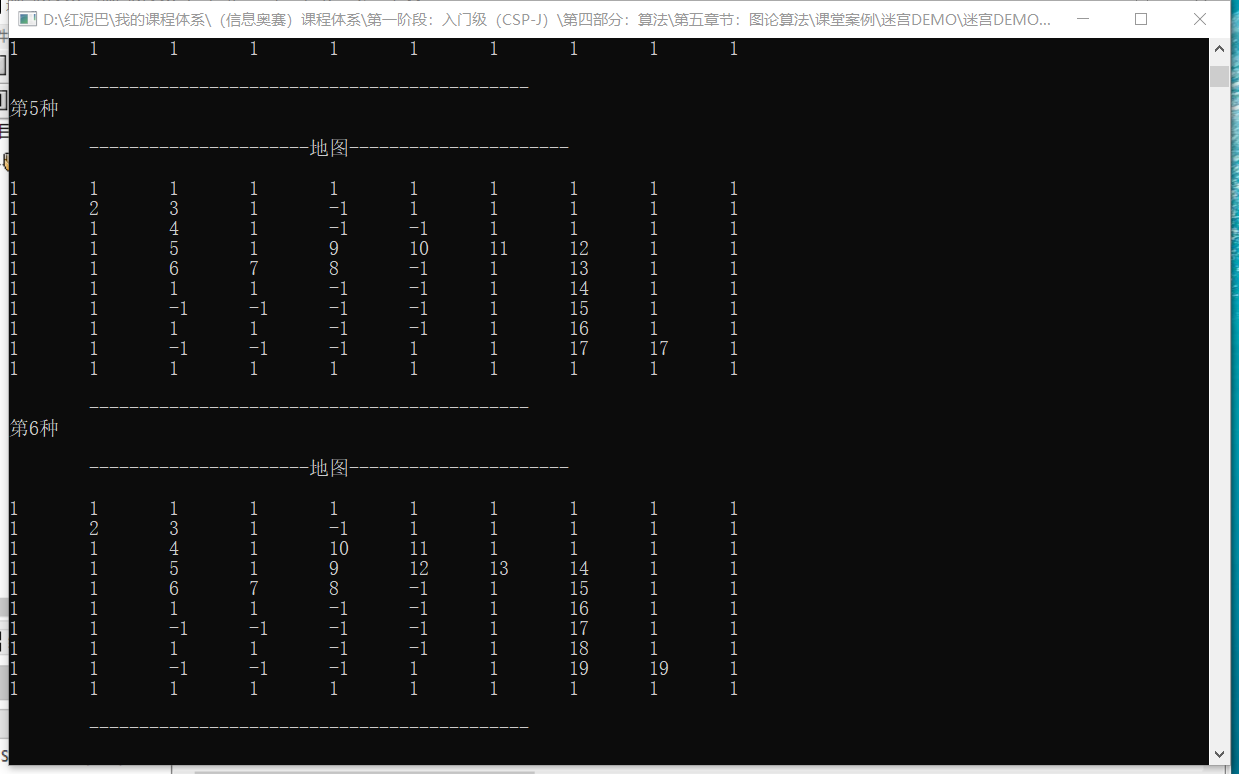
if(tmpPos==end ) {
Maze::totalCount++;
cout<<"第"<<Maze::totalCount<<"种"<<endl;
//输出
Maze::showMap();
} else {
//递归,如果相邻坐标是死胡同,则当前坐标也是
isConnection=Maze::searchPathByRecursion(tmpPos,end,deep+1);
}
//回溯时恢复状态
//Maze::maze[tmpPos.x][tmpPos.y]=-1;
}
}
if(!isConnection)
//死胡同坐标,回溯不用判断是否死胡同
Maze::maze[start.x][start.y]=-3;
return isConnection;
}
测试代码:
int main(int argc, char** argv) {
//省略……
//递归搜索路径
maze.searchPathByRecursion(startPos,endPos,2) ;
return 0;
}
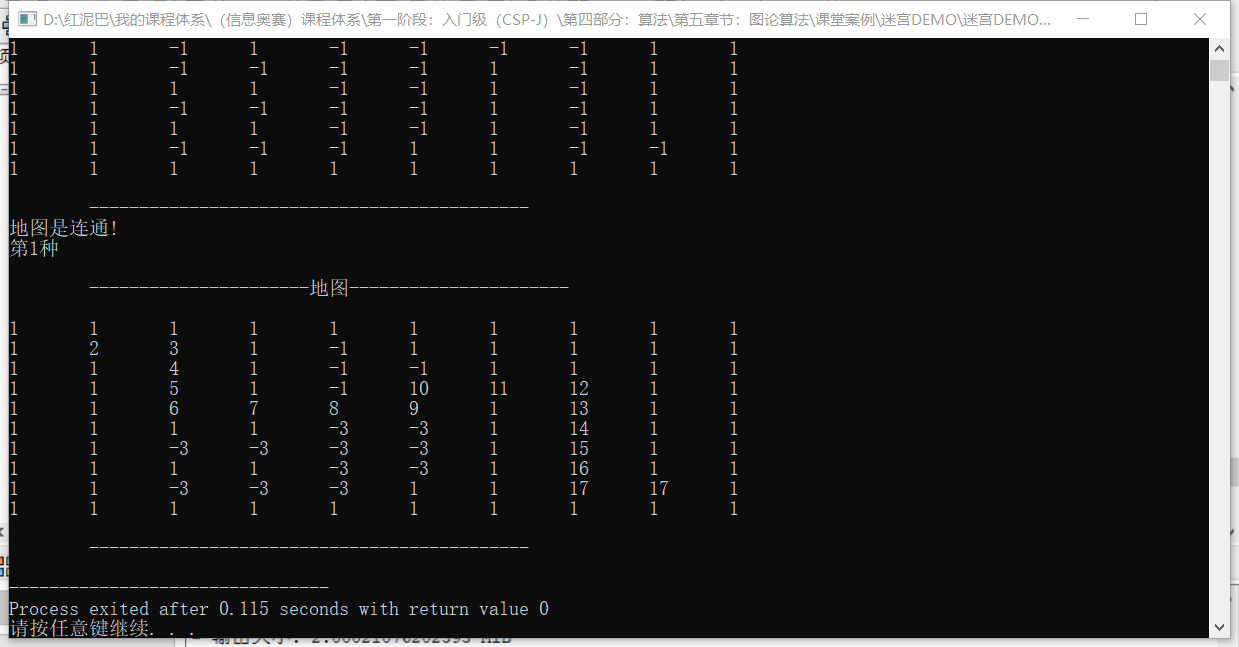
注释如下代码:
//Maze::maze[tmpPos.x][tmpPos.y]=-1;
会显示一条路径。如下图所示,-3表示递归过,但是死胡同的坐标。标记为大于等于 2 的位置为可正常通行。
如果打开如下代码。
//回溯时恢复原来状态
Maze::maze[tmpPos.x][tmpPos.y]=-1;
显示所有路径,回溯不用判断死胡同坐标,回溯时会自动恢复原来的状态。
2.4 广度搜索
在家拖地时,如果从当前位置向前拖,然后再折回,这和深度优先搜索方式一样。另一种是从左向右方式,逐渐向远处外延,这和广度搜索一样。

广度优先类似于一石激起千层浪,一层层向外推动。
/*
*广度搜索
*/
void Maze::searchPathByQueue(Position start,Position end) {
//所有路径
vector<vector<Position>> paths;
//把起始点放入队列
Maze::mazeQueue.push(start);
vector<Position> path;
path.push_back(start);
paths.push_back(path);
Position pos;
bool isConnection;
Position tmpPos;
while(true ) {
//从队列中得到队头数据
pos=Maze::mazeQueue.front();
Maze::mazeQueue.pop();
for(int i=0; i<paths.size(); i++) {
//得到所有路径
path=paths[i];
Position lastPos=path.back();
for(int j=0; j<4; j++) {
Position tmp= {lastPos.x+dirs[j].xOffset,lastPos.y+dirs[j].yOffset };
if(tmp==pos) {
path.push_back(pos);
paths.push_back(path);
break;
}
}
}
//到达终点
if(pos==end) {
for(int i=0; i<paths.size(); i++) {
if( paths[i].back()==end ) {
for(int j=0; j<paths[i].size(); j++) {
Maze::maze[ paths[i][j].x ][paths[i][j].y]=-2;
paths[i][j].desc();
}
break;
}
}
return;
}
//查找相邻的坐标
for(int i=0; i<4; i++) {
tmpPos= { pos.x+dirs[i].xOffset,pos.y+dirs[i].yOffset };
if( Maze::maze[tmpPos.x][tmpPos.y]==-1 ) {
//可通加入队列
Maze::mazeQueue.push(tmpPos);
Maze::maze[tmpPos.x][tmpPos.y]=0;
}
}
}
}
输出结果: 迷宫中的广度优先搜索相当于在无向图中查找路径,可以找到任何 2 个可通行位置的最短路径。这里只显示起点到终点的最短路径,如下-2所标记的位置连接起来的路径。

3. 总结
迷宫本质是矩阵,在解决迷宫问题时,可以考虑运用矩阵相关的操作理论。另,树、图的关系也常用矩阵描述,迷宫问题也可以当成树、图论算法中的子问题。