目录
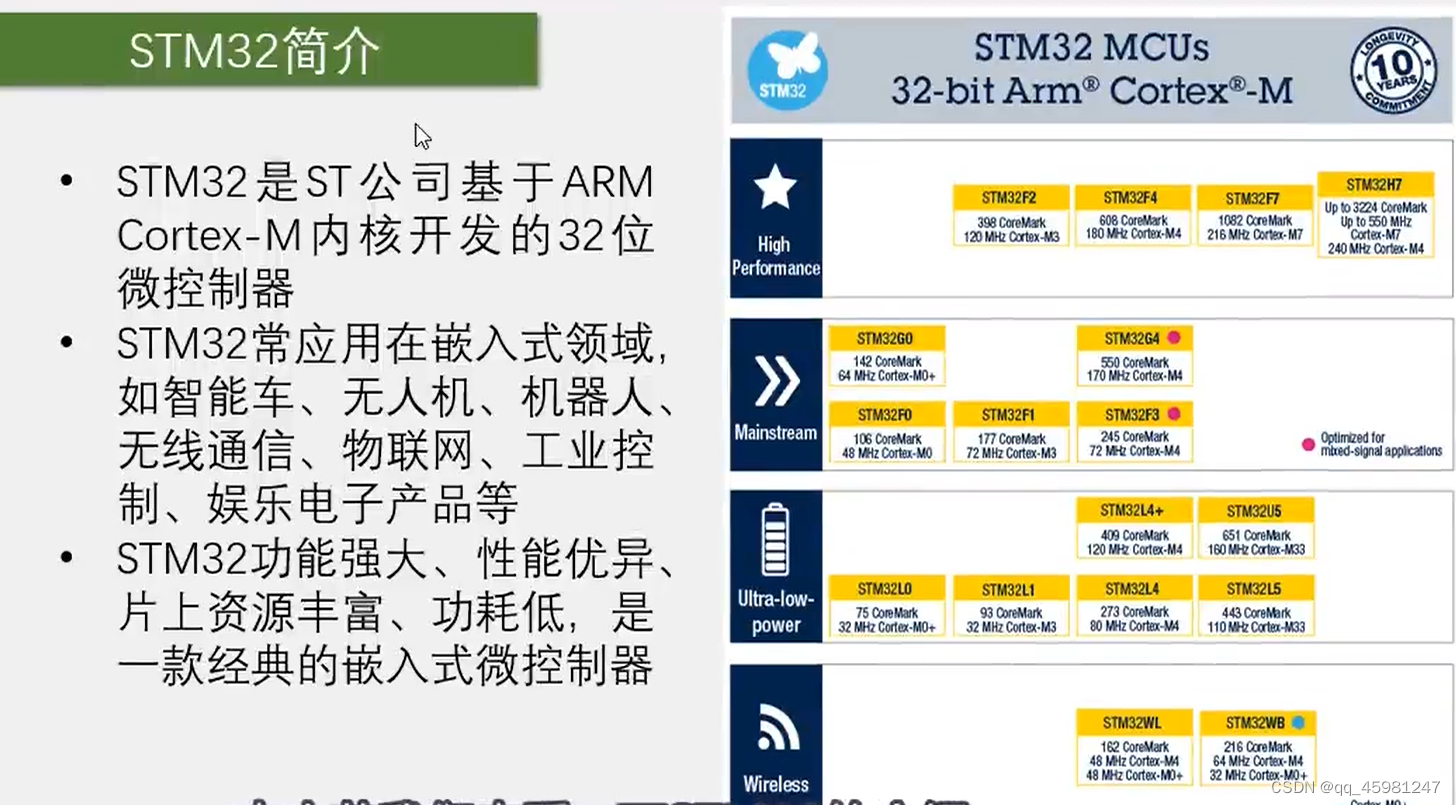
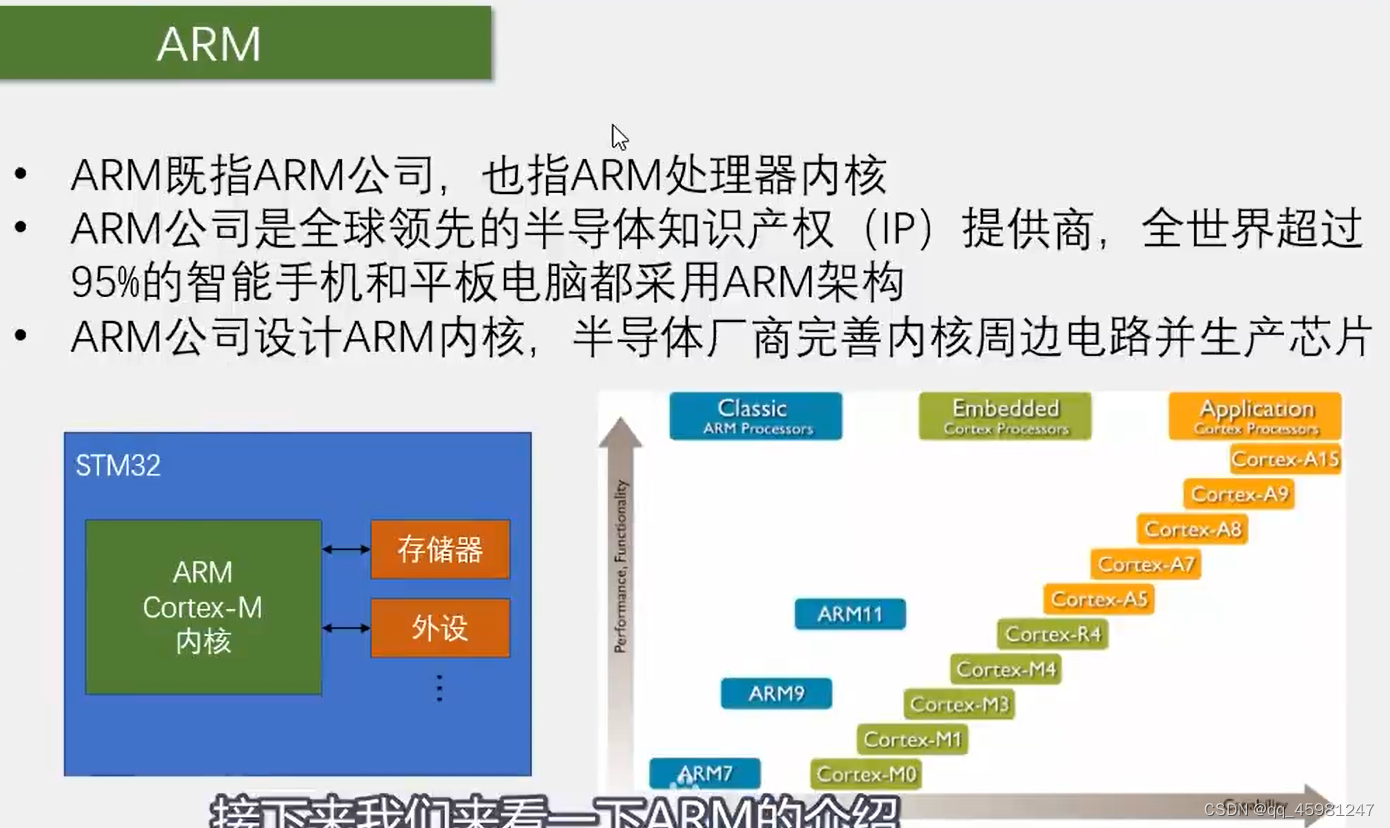
STM32简介
点亮PC13LED
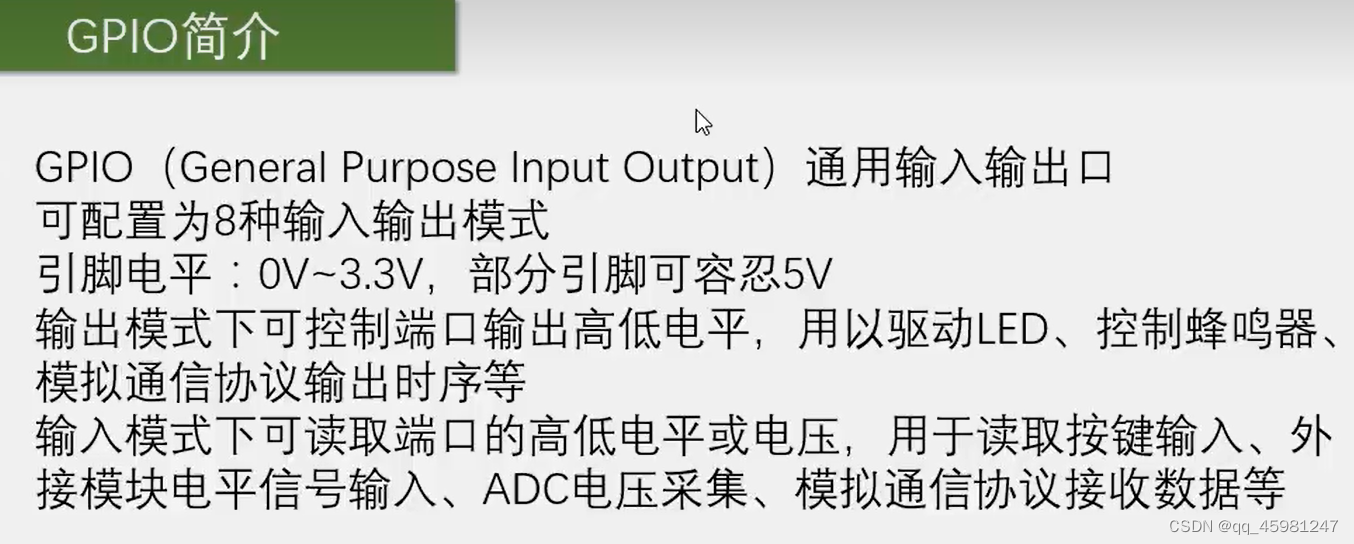
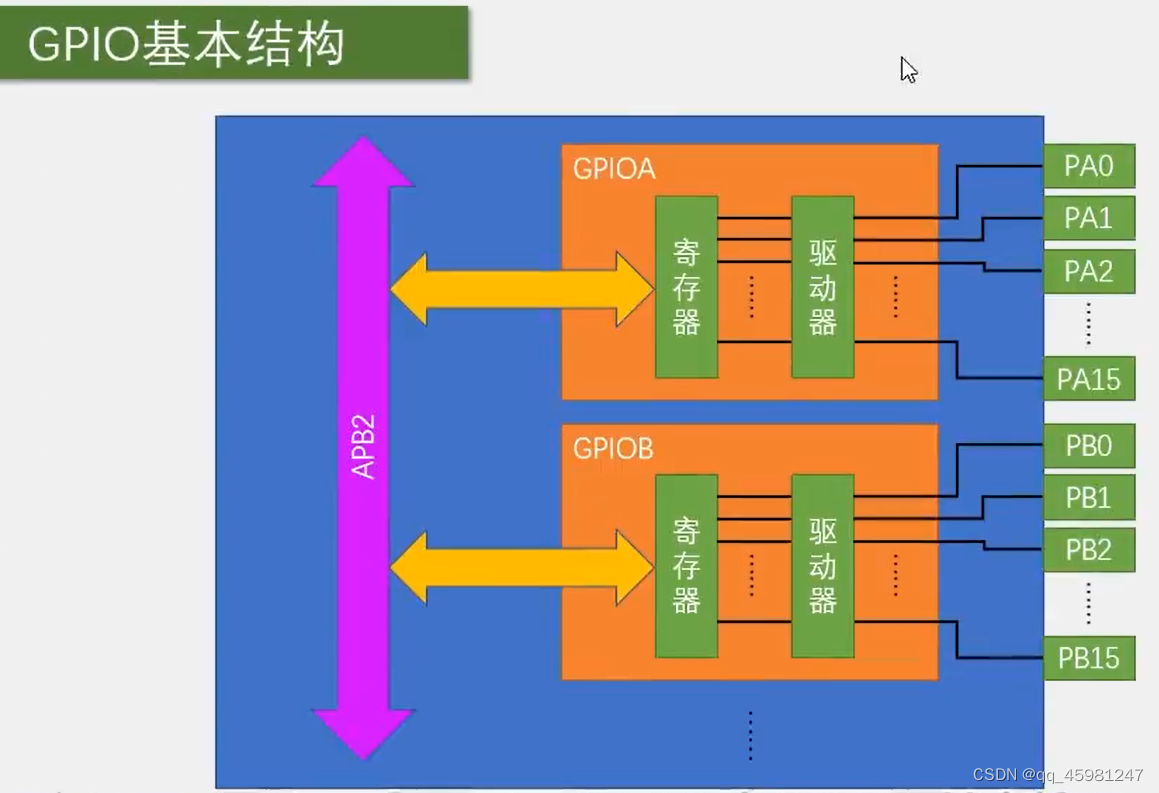
GPIO
LED闪烁
LED流水灯
按键控制LED
光敏传感器控制蜂鸣器
OLED调试工具
OLED显示
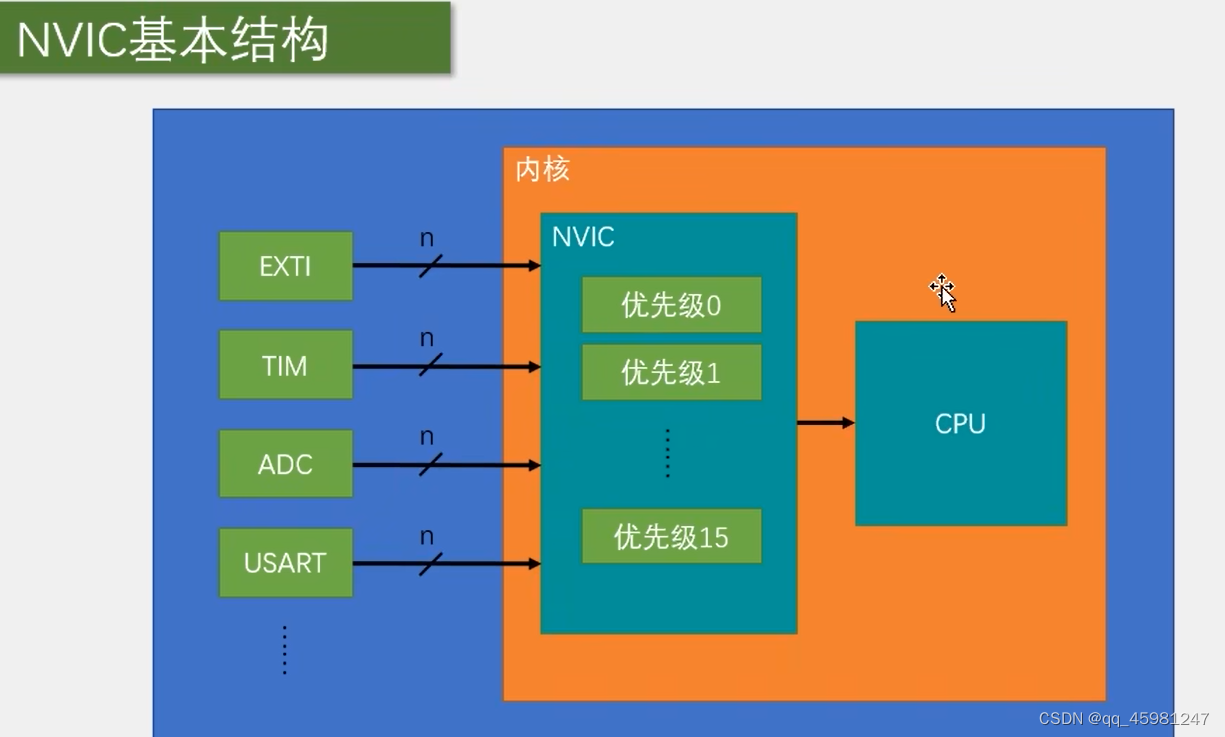
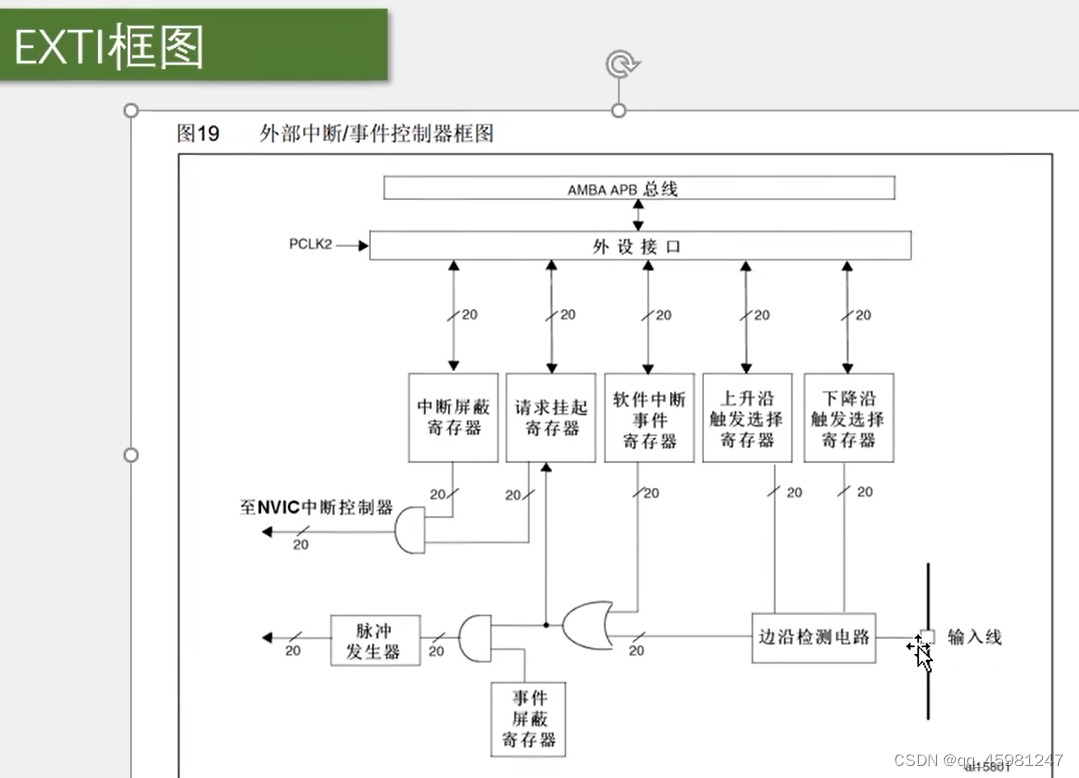
EXTI外部中断
对射式红外传感器计次
旋转编码器计次
继续
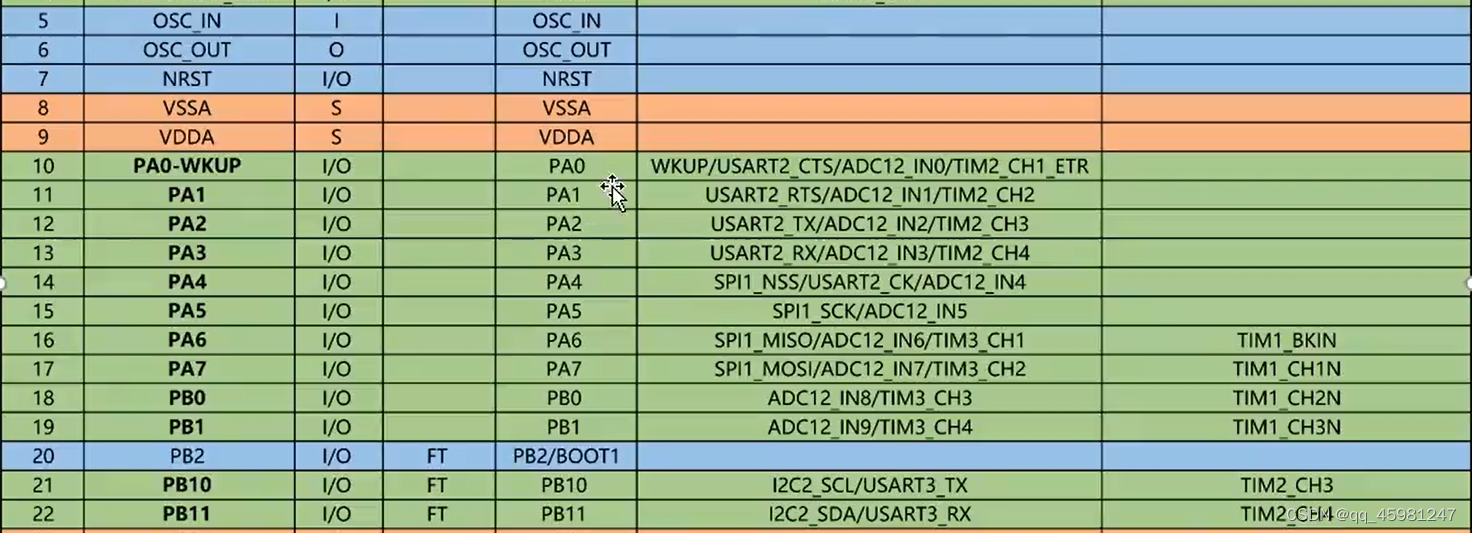
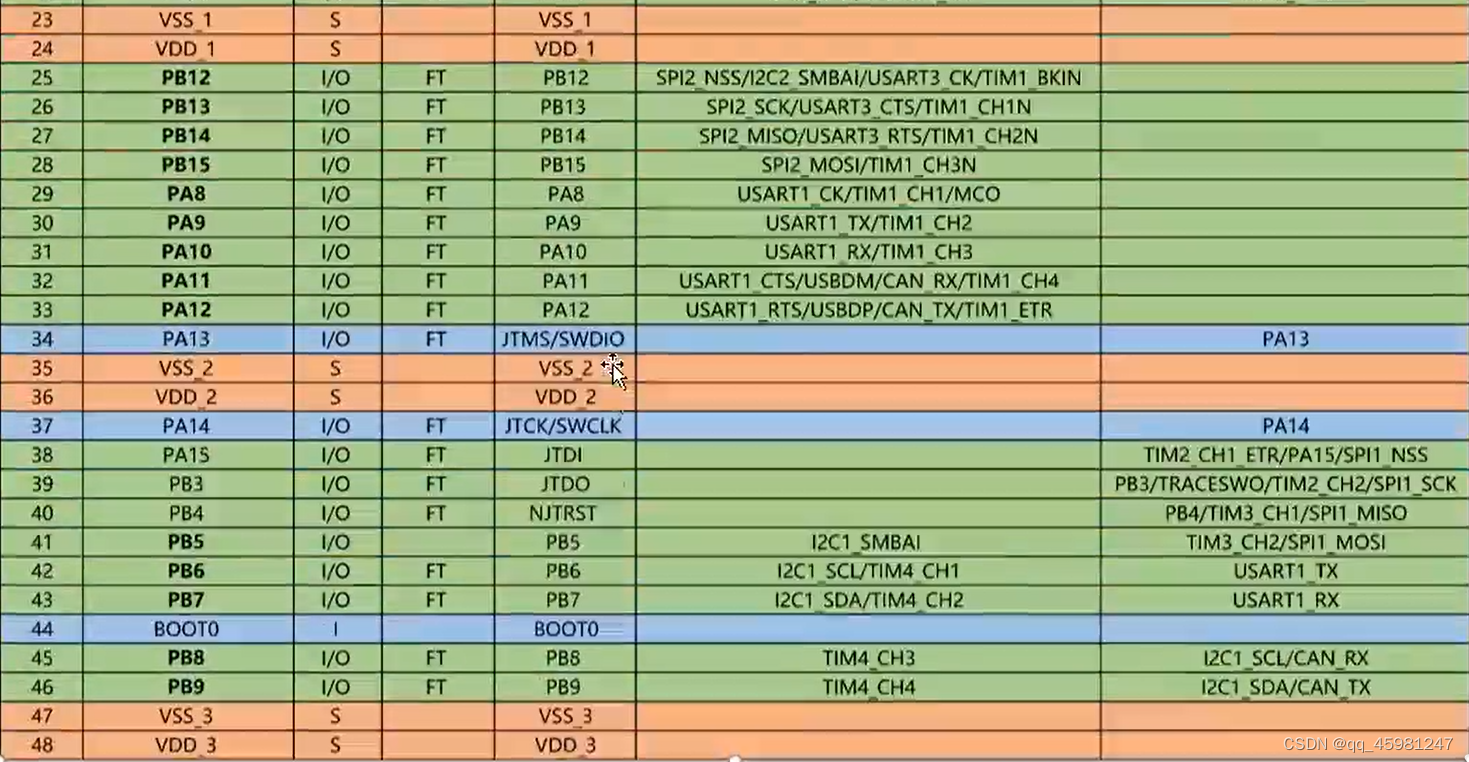
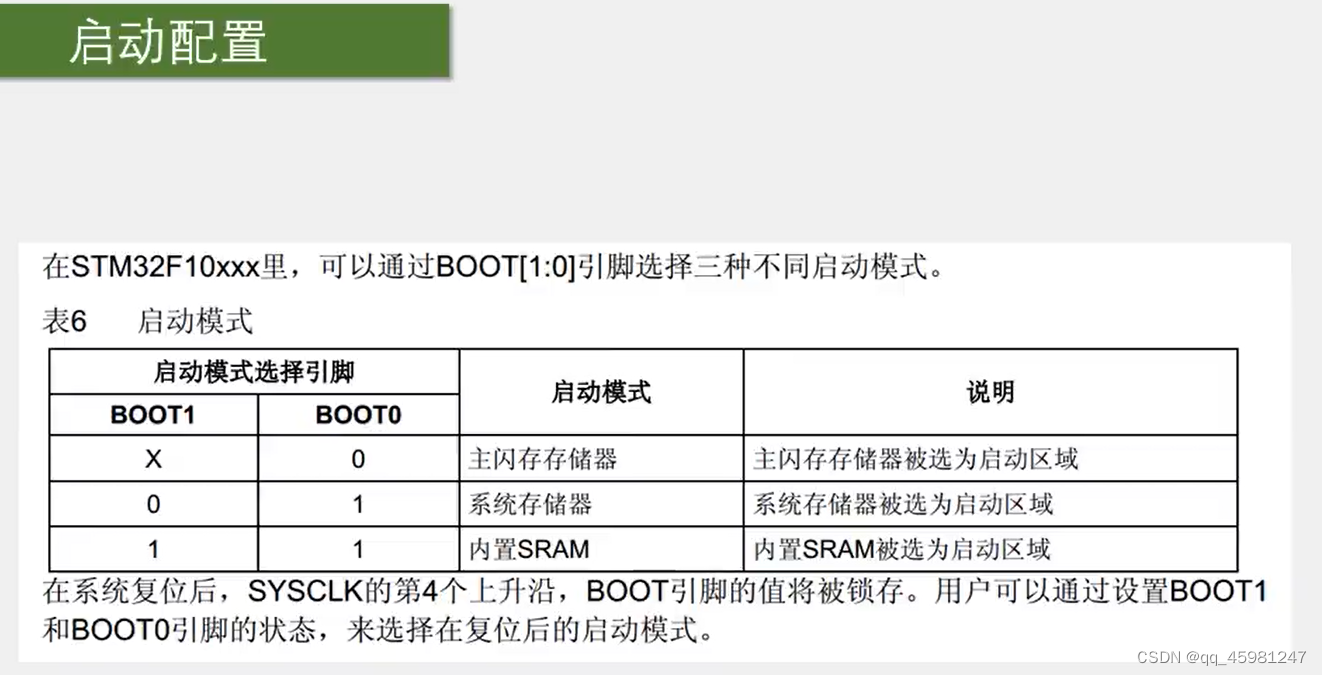
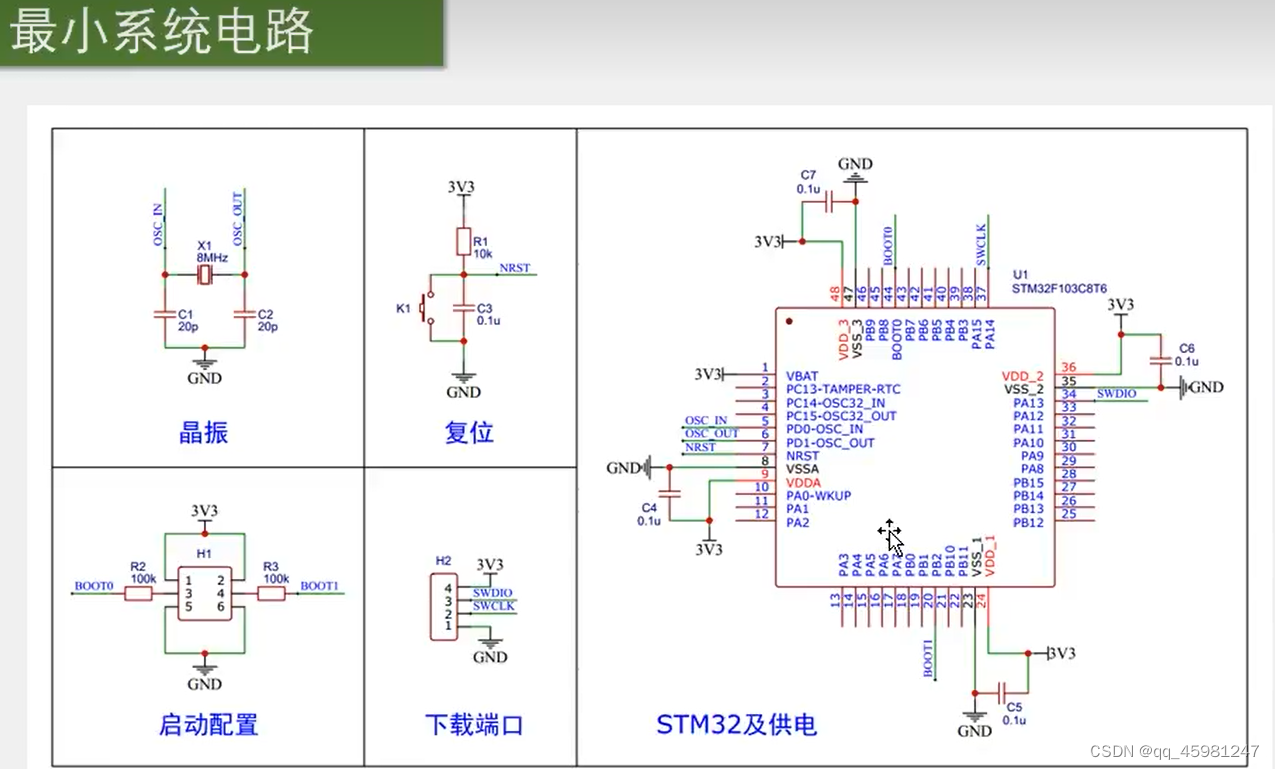
STM32简介




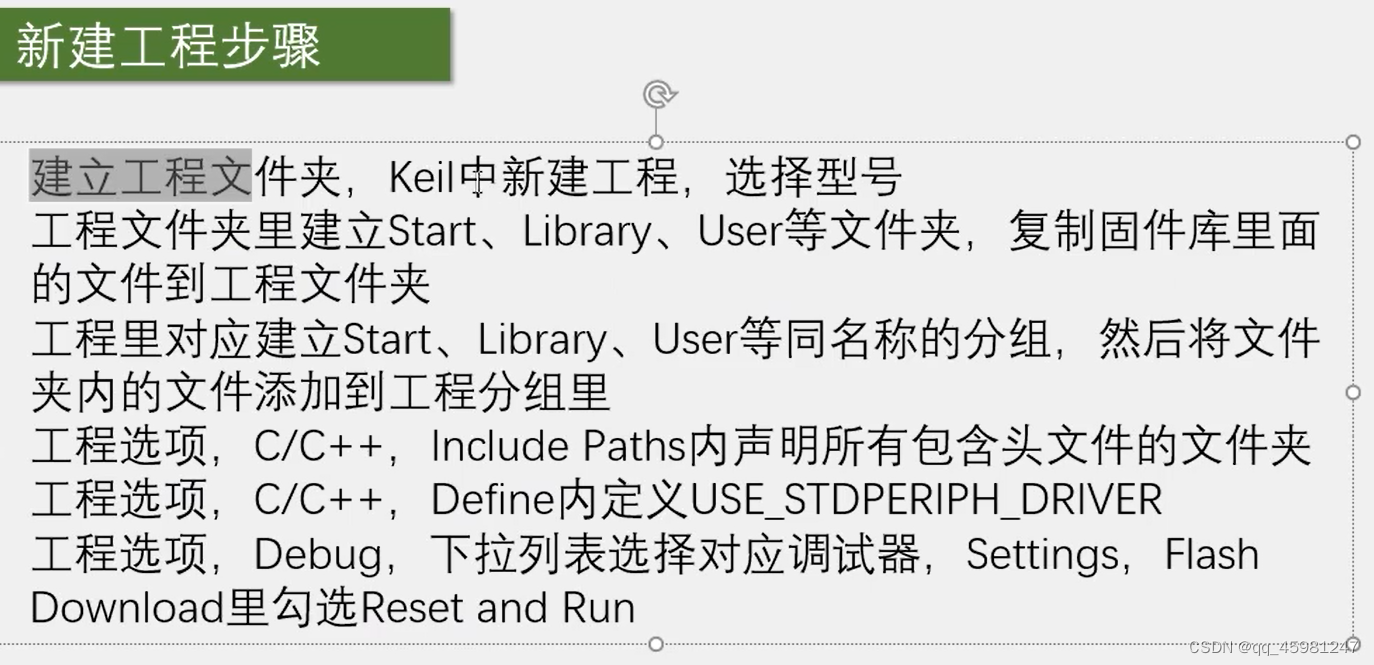
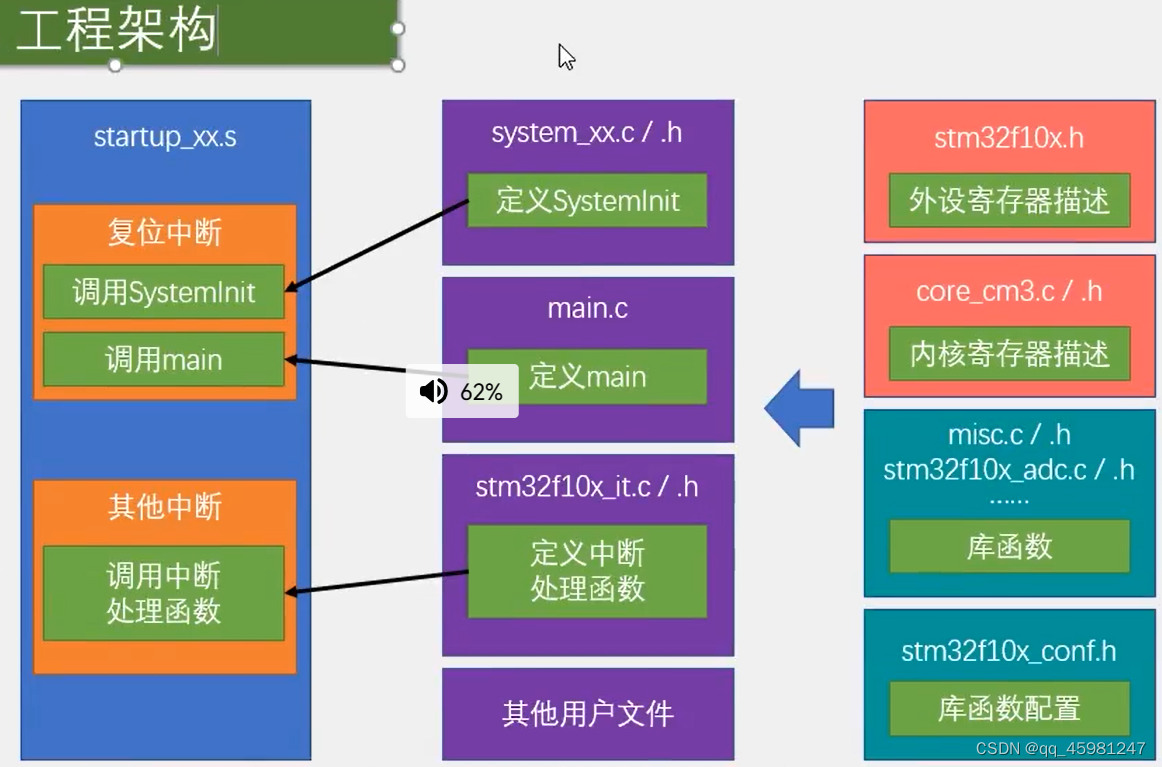
点亮PC13LED
main.c
#include "stm32f10x.h" // Device header
int main(void)
{
//方式二:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
//配置GPIOC的时钟
GPIO_InitTypeDef GPIO_InitStructure;//配置结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//设置通用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;//配置13针脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//配置速度
GPIO_Init(GPIOC, &GPIO_InitStructure);
//配置端口模式
GPIO_SetBits(GPIOC, GPIO_Pin_13);//将其置为高电平
//GPIO_ResetBits(GPIOC, GPIO_Pin_13);//将其置为低电平
//配置高低电平
/*****************************************/
//方式一:
//PC13有一个灯,这个灯低电平才会亮
//RCC ->APB2ENR = 0x00000010;//GPIO都是APB2的外设,APB2ENR是
//APB2时钟使能寄存器,IOPCEN为使能位,将其设置为1,打开时钟
//GPIOC ->CRH = 0x00300000;//配置PC13口模式,端口配置高寄存器
//(GPIOx_CRH),配置CNF13以及MODE13,
//GPIOC ->ODR = 0x00002000;//端口输出数据寄存器GPIOx_ODR,
//为ODR13进行配置高低电平,0x00002000灭,0x00000000亮
while(1)
{
}
}
GPIO
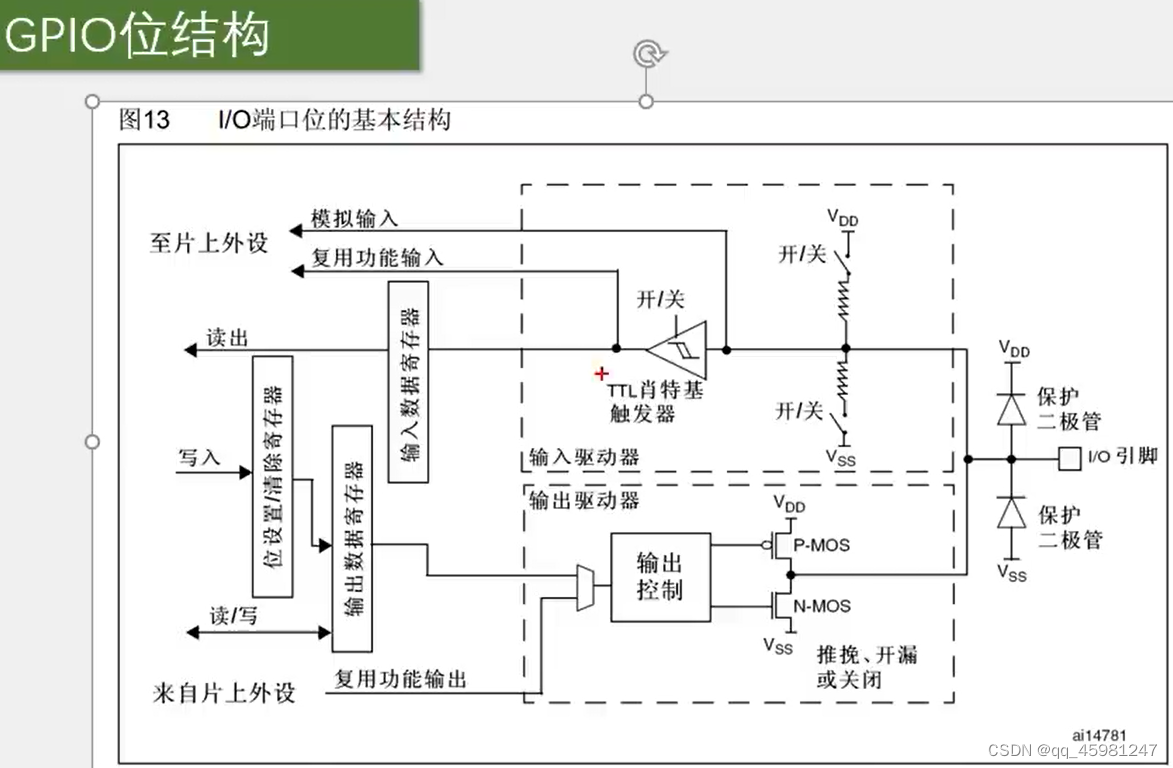



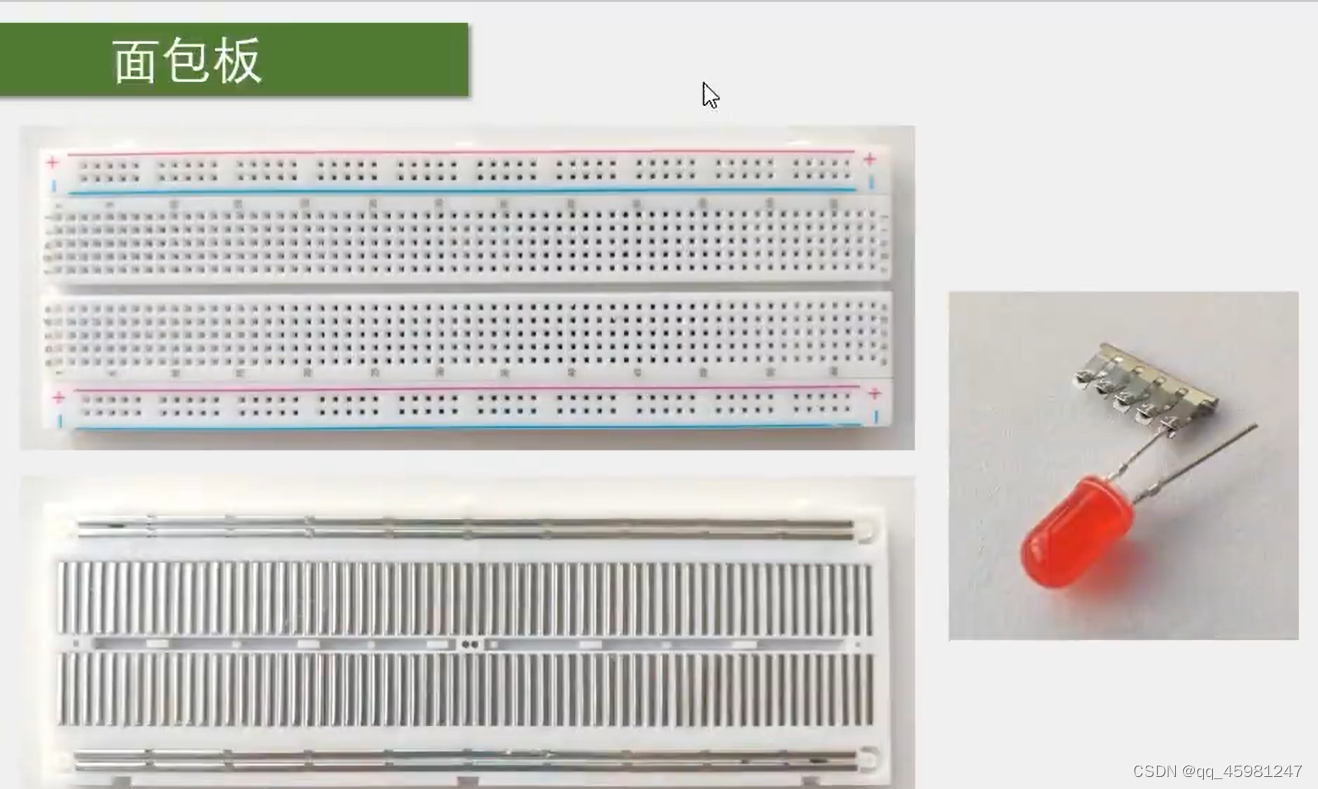
面包板两端横向是相通的,内部是纵向相通
LED闪烁
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
//GPIO_ResetBits(GPIOA,GPIO_Pin_0);//灯亮
//GPIO_SetBits(GPIOA,GPIO_Pin_0);//灯灭
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);//灯亮
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);//灯灭
//第三步:使用输出或者输入的函数控制GPIO口
while(1)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
Delay_ms(100);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(100);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0);
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1);
Delay_ms(500);
}
}
LED流水灯
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;//初始化所有端口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
//GPIO_ResetBits(GPIOA,GPIO_Pin_0);//灯亮
//GPIO_SetBits(GPIOA,GPIO_Pin_0);//灯灭
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);//灯亮
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);//灯灭
//第三步:使用输出或者输入的函数控制GPIO口
while(1)
{
// GPIO_Write(GPIOA,~0x0001);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0002);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0004);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0008);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0010);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0020);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0040);
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0080);
// Delay_ms(500);
unsigned char i ;
for( i = 0 ; i < 8 ;i++)
{
GPIO_Write(GPIOA,~(0x0001 << i));
Delay_ms(500);
}
}
}
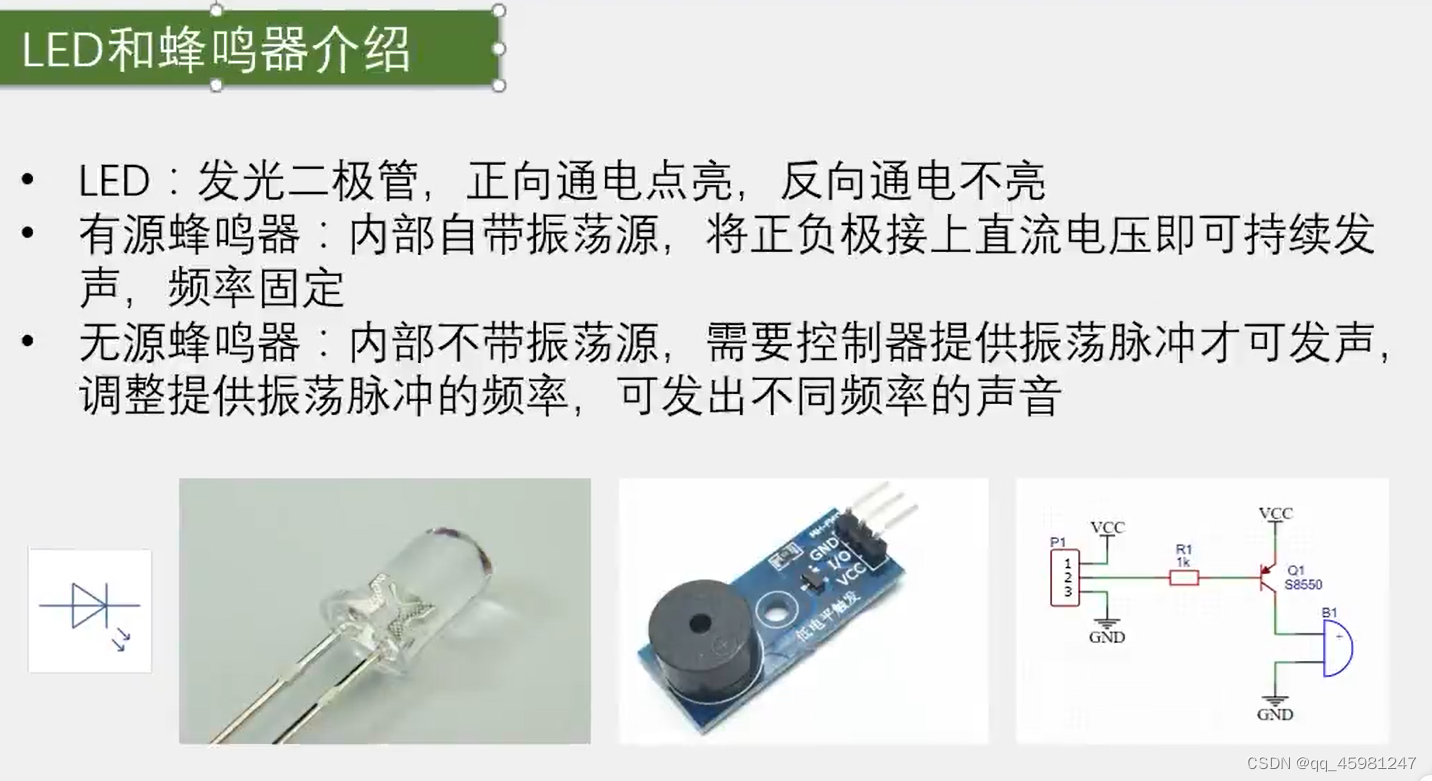
蜂鸣器
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//初始化12端口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
//GPIO_ResetBits(GPIOA,GPIO_Pin_0);//灯亮
//GPIO_SetBits(GPIOA,GPIO_Pin_0);//灯灭
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);//灯亮
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);//灯灭
//第三步:使用输出或者输入的函数控制GPIO口
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(700);
}
}
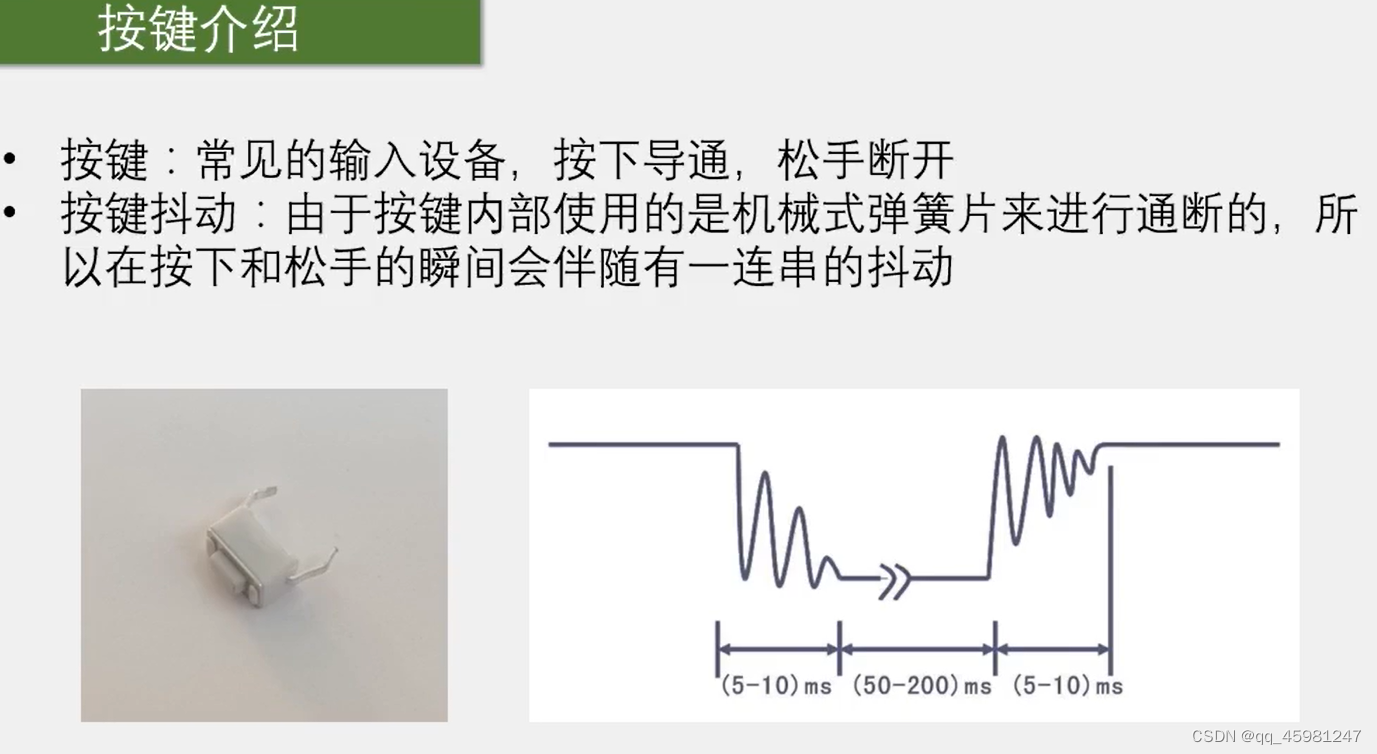

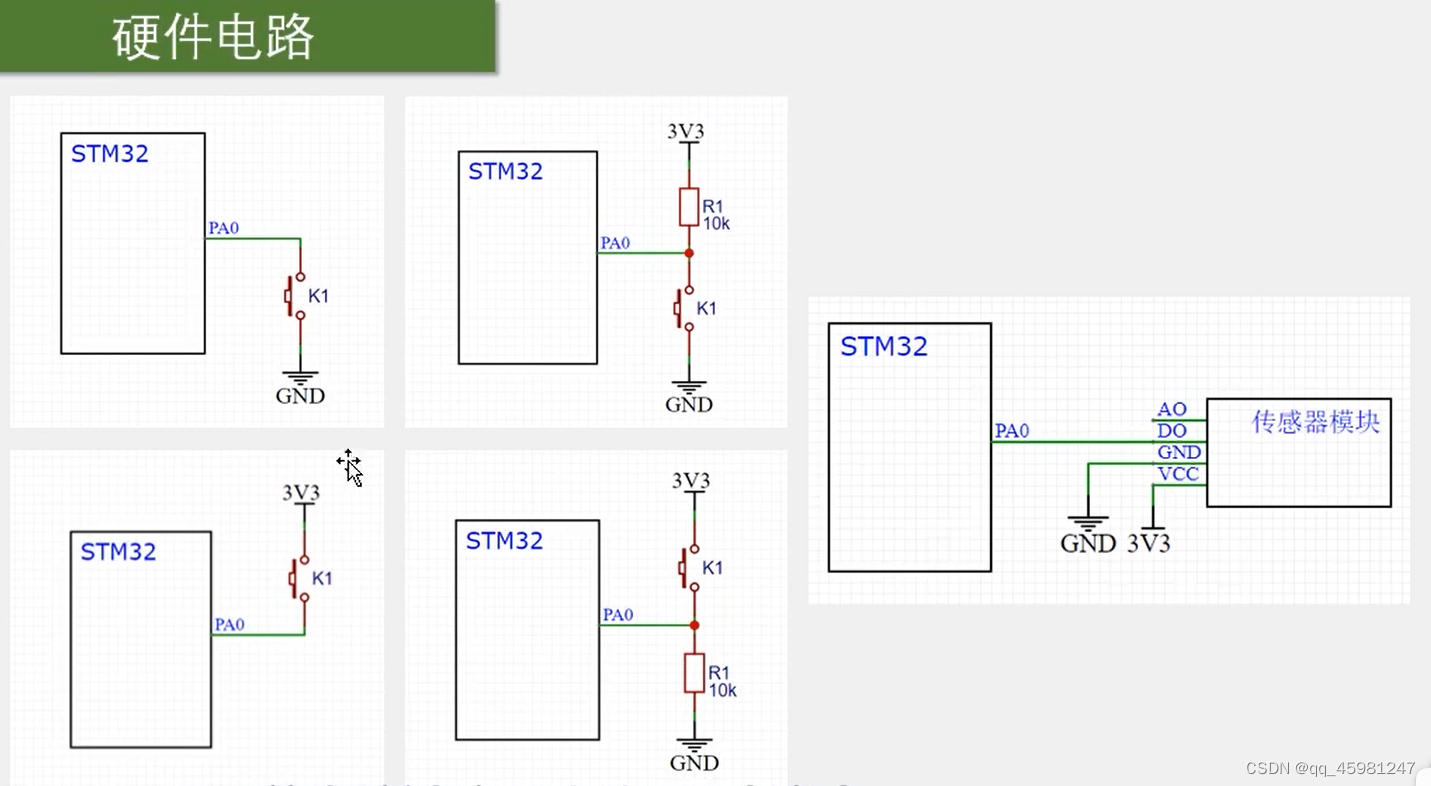

按键控制LED
key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
/**
* @brief 初始化位于PB1以及PB11按键
* @param 无
* @retval 无
*/
void Key_Init(void)//配置按键
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//需要读取按键,设置上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出速度,输入不影响
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
/**
* @brief 获取所按下的键值
* @param 无
* @retval KeyNum 按下的键值
*/
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
//此时处于一直按下的状态
Delay_ms(20);
KeyNum = 1;
}
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0)
{
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0)
//此时处于一直按下的状态
Delay_ms(20);
KeyNum = 2;
}
return KeyNum;
}
LED.c
#include "stm32f10x.h" // Device header
/**
* @brief 打开GPIO时钟,并进行初始化
* @param 无
* @retval 无
*/
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
// GPIO_SetBits(GPIOA,GPIO_Pin_1 | GPIO_Pin_2);
}
/**
* @brief 将位于PA1端口电平置零
* @param 无
* @retval 无
*/
void LED1_On(void)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
/**
* @brief 将位于PA1端口电平置一
* @param 无
* @retval 无
*/
void LED1_Off(void)
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
/**
* @brief 查看PA1端口电平并将其翻转
* @param 无
* @retval 无
*/
void LED1_Turn(void)
{
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_1) == 0)//查看当前端口输出
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);//将其置一
}
else
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);//将其置零
}
}
/**
* @brief 将位于PA2端口电平置零
* @param 无
* @retval 无
*/
void LED2_On(void)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_2);
}
/**
* @brief 将位于PA1端口电平置一
* @param 无
* @retval 无
*/
void LED2_Off(void)
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);
}
/**
* @brief 查看PA2端口电平并将其翻转
* @param 无
* @retval 无
*/
void LED2_Turn(void)
{
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_2) == 0)//查看当前端口输出
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);//将其置一
}
else
{
GPIO_ResetBits(GPIOA,GPIO_Pin_2);//将其置零
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
uint8_t KeyNum;
int main(void)
{
LED_Init();
Key_Init();
while(1)
{
KeyNum = Key_GetNum();//获取键值
if(KeyNum == 1)//如果键1按下,则翻转LED1电平
{
LED1_Turn();
}
if(KeyNum == 2)//如果键2按下,则翻转LED1电平
{
LED2_Turn();
}
}
}
光敏传感器控制蜂鸣器
LightSensor.c
#include "stm32f10x.h" // Device header
/**
* @brief 初始化端口在PB^13光敏传感器
* @param 无
* @retval 无
*/
void LightSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
}
/**
* @brief 获得当前光敏传感器输入电平
* @param 无
* @retval 返回周围光线情况
*/
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13);
//周围暗的时候输入1;亮的时候输入0
//周围暗的时候输出0;亮的时候输出1
}
Buzzer.c
#include "stm32f10x.h" // Device header
/**
* @brief 打开GPIO时钟,并进行初始化
* @param 无
* @retval 无
*/
void Buzzer_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//第一步:使用RCC开启GPIO时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//第二步:使用GPIO_Init()初始化GPIO
GPIO_SetBits(GPIOB,GPIO_Pin_12);
}
/**
* @brief 将位于PB12端口电平置零
* @param 无
* @retval 无
*/
void Buzzer_On(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
}
/**
* @brief 将位于PB12端口电平置一
* @param 无
* @retval 无
*/
void Buzzer_Off(void)
{
GPIO_SetBits(GPIOB,GPIO_Pin_12);
}
/**
* @brief 查看PB12端口电平并将其翻转
* @param 无
* @retval 无
*/
void Buzzer_Turn(void)
{
if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_12) == 0)//查看当前端口输出
{
GPIO_SetBits(GPIOB,GPIO_Pin_12);//将其置一
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);//将其置零
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
Buzzer_Init();
LightSensor_Init();
while(1)
{
if(LightSensor_Get() == 1)//比较暗的时候
{
Buzzer_On();
}
else{
Buzzer_Off();
}
}
}
OLED调试工具

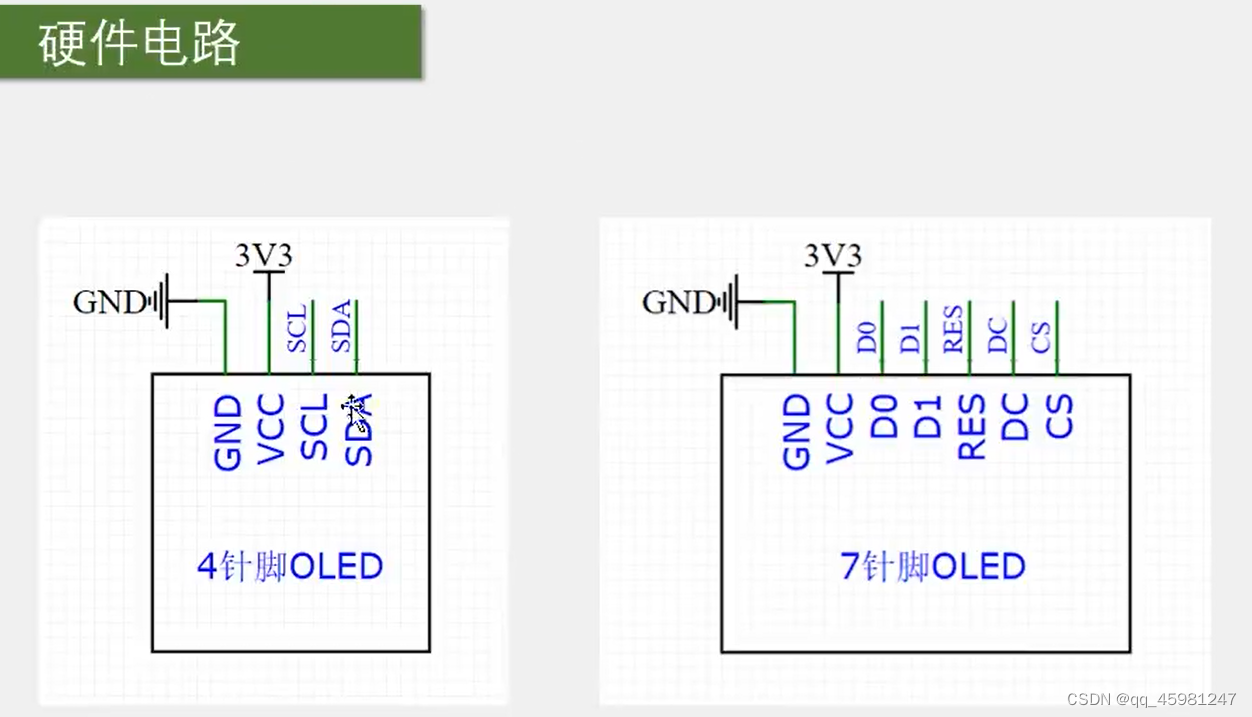

OLED显示
OLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))
/*引脚初始化*/
void OLED_I2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
uint8_t KeyNum;
int main(void)
{
OLED_Init();
OLED_ShowChar(1,1,'A');
OLED_ShowString(1,3,"Hello,world!");
OLED_ShowNum(2,1,30,2);
OLED_ShowSignedNum(2,4,300,3);
OLED_ShowSignedNum(2,9,-300,3);
OLED_ShowHexNum(3,1,0xAA55,4);
OLED_ShowBinNum(4,1,0xAA55,16);
OLED_Clear();
while(1)
{
}
}
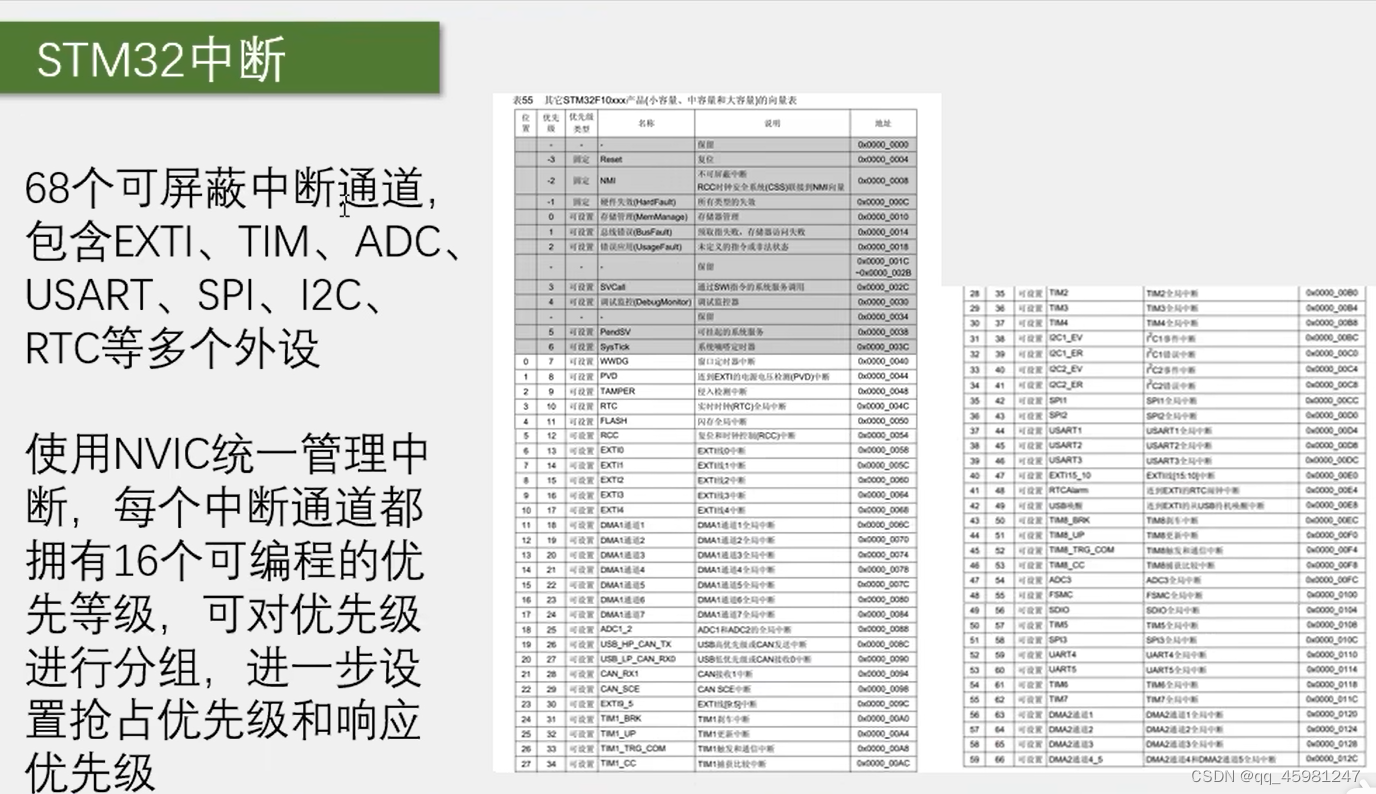
EXTI外部中断






对射式红外传感器计次
Encoder.c
#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count;
/**
* 函 数:计数传感器初始化
* 参 数:无
* 返 回 值:无
*/
void CountSensor_Init(void)//初始化
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//开启GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//开启AFIO时钟
//EXTI与NVIC不需要开启时钟
//GPIO配置
GPIO_InitTypeDef GPIO_InitStructure;//外部中断一般选择浮空,上拉或者下拉
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化GPIOB外设
//AFIO配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
//EXTI配置
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14;//选择中断源位置
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//选择事件还是中断
//EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发(离开后触发+1)
//EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;//上升沿触发
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;//上升下降都触发
EXTI_Init(&EXTI_InitStructure);//初始化EXTI
//NVIC配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断分组(两位抢占,两位相应)
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;//选择芯片对应通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//0-3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//0-3
NVIC_Init(&NVIC_InitStructure);
}
/**
* 函 数:获取计数传感器的计数值
* 参 数:无
* 返 回 值:计数值,范围:0~65535
*/
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
/**
* 函 数:EXTI15_10外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI15_10_IRQHandler(void)//中断函数
{
if(EXTI_GetITStatus(EXTI_Line14) == SET)//判断是否是来自14号端口的中断
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == 1 || GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == 0)
//上升沿若设置为0,则离开加一
//下降沿若设置为1,则挡住加一
//若上升下降都触发若设置为 0|1,则挡住加一,离开也加一
//这里的判断是为了防止数据跳跃幅度大
//传感器输出高电平灭,输出低电平亮
//传感器输入高电平亮,输入低电平灭
{
CountSensor_Count++;
}
EXTI_ClearITPendingBit(EXTI_Line14);//完成中断后清除中断标志位
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
uint8_t KeyNum;
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1,1,"Count:");
while(1)
{
OLED_ShowNum(1,7,CountSensor_Get(),5);
}
}
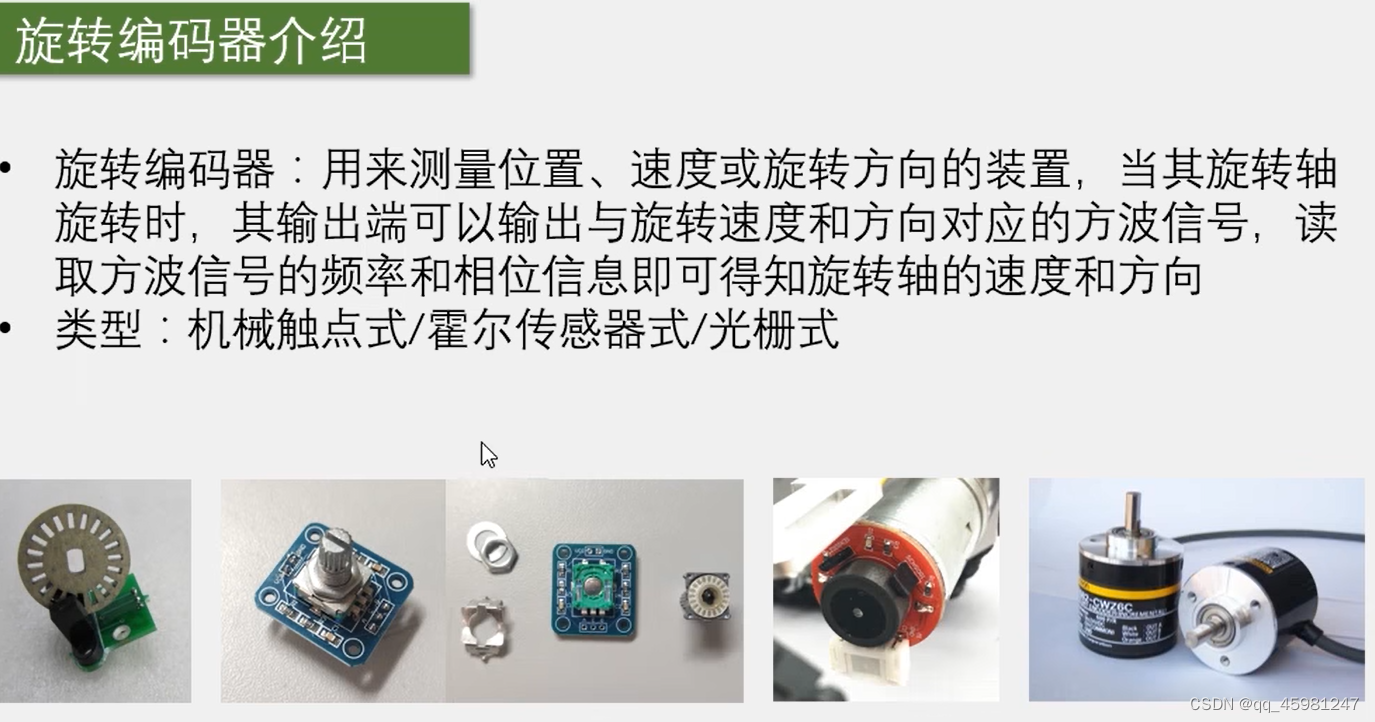
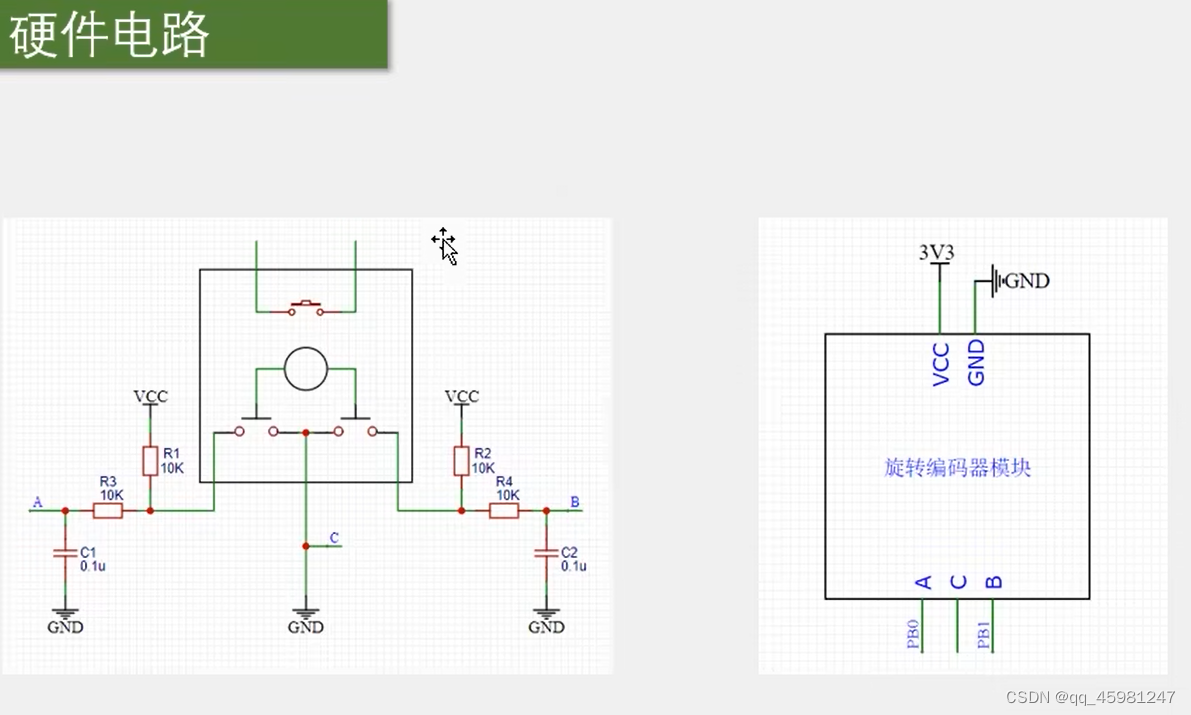
旋转编码器计次
Encoder.c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
/**
* 函 数:旋转编码器初始化
* 参 数:无
* 返 回 值:无
*/
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//开启GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//开启AFIO时钟
//EXTI与NVIC不需要开启时钟
//GPIO配置
GPIO_InitTypeDef GPIO_InitStructure;//外部中断一般选择浮空,上拉或者下拉
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化GPIOB外设
//AFIO配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);//配置PB^1端口
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);//配置PB^0端口
//EXTI配置
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;//选择中断源位置
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//选择事件还是中断
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
//EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;//上升沿触发
//EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;//上升下降都触发
EXTI_Init(&EXTI_InitStructure);//初始化EXTI
//NVIC配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断分组(两位抢占,两位相应)
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//选择芯片端口0对应通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//0-3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//0-3
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//选择芯片端口1对应通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//0-3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//0-3
NVIC_Init(&NVIC_InitStructure);
}
/**
* 函 数:EXTI0外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI0_IRQHandler(void)//端口0触发中断(左旋)
{
if(EXTI_GetITStatus(EXTI_Line0) == SET)//检查EXTI是否被置位SET,如果置位则进行中断程序
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)//进行判断另一个引脚
{
Encoder_Count--;
}
EXTI_ClearITPendingBit(EXTI_Line0);//清除标志位
}
}
/**
* 函 数:EXTI1外部中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void EXTI1_IRQHandler(void)//端口1触发中断(右旋)
{
if(EXTI_GetITStatus(EXTI_Line1) == SET)//检查EXTI是否被置位SET,如果置位则进行中断程序
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0)//进行判断另一个引脚
{
Encoder_Count++;
}
EXTI_ClearITPendingBit(EXTI_Line1);//清除标志位
}
}
/**
* 函 数:旋转编码器获取增量值
* 参 数:无
* 返 回 值:自上此调用此函数后,旋转编码器的增量值
*/
int16_t EncoderCount_Get(void)
{
int16_t Tmp;
/*使用Tmp变量作为中继,目的是返回Encoder_Count后将其清零*/
/*在这里,也可以直接返回Encoder_Count
但这样就不是获取增量值的操作方法了
也可以实现功能,只是思路不一样*/
Tmp = Encoder_Count;
Encoder_Count = 0;
return Tmp;
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1,1,"Num:");
while(1)
{
Num += EncoderCount_Get();//这里的函数得到的是对当前数进行操作(加或减)的增量值
OLED_ShowSignedNum(1,5,Num,5);//这里要显示有符号数
}
}
注意:中断函数中,最好不要执行耗时过长的代码;最好不要在中断函数和主函数中调用相同的函数或操作同一个硬件,尤其的硬件相关函数。尽量操作变量或者标志位,当中断返回时,再对变量进行显示和操作。减少代码间的耦合性,让各部分代码相互独立。