一、内核内存管理框架
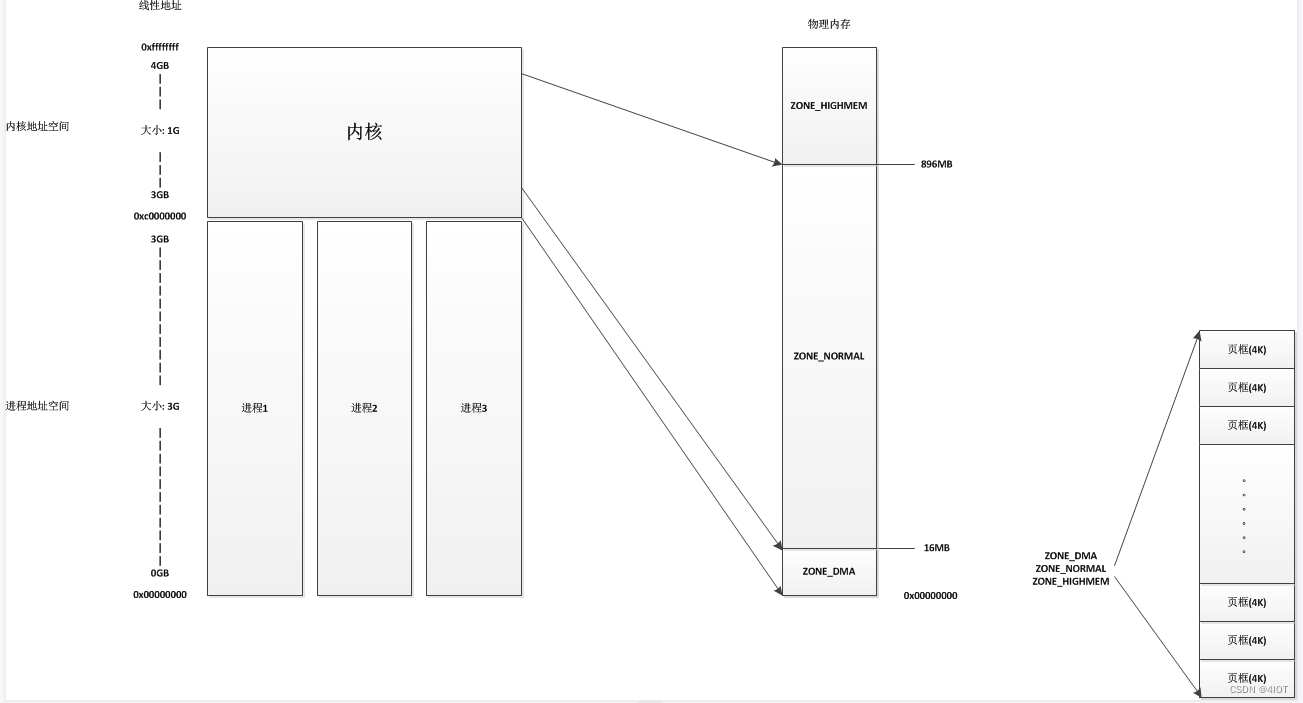
内核将物理内存等分成N块4KB,称之为一页,每页都用一个struct page来表示,采用伙伴关系算法维护
 补充:
补充:
Linux内存管理采用了虚拟内存机制,这个机制可以在内存有限的情况下提供更多可用的内存空间。每个进程都有自己独立的虚拟地址空间,应用程序只能访问自己的地址空间,而不能直接访问其他进程的地址空间或内核空间。
当应用程序需要访问某些数据时,它会使用虚拟地址来引用这些数据。实际上,这些虚拟地址并不是直接映射到物理内存,而是由操作系统进行转换。操作系统将虚拟地址映射到物理内存中的一些页框(Page Frame),这个过程称为页表映射(Page Table Mapping)。
因此,每个应用程序都有自己的页表,它们被存储在内存中,这些页表以及对应的物理页框在不同的时间可能会被交换到硬盘上,从而释放内存空间。当应用程序访问虚拟地址时,操作系统会根据页表映射的结果找到相应的物理页框,然后将数据从物理内存中读取出来。
由于每个应用程序都有自己独立的虚拟地址空间和页表,所以应用程序之间的内存访问是相互隔离的。这种隔离机制可以保证每个应用程序只能访问自己的内存空间,而不能对其他应用程序或操作系统造成干扰。这也是为什么应用程序内存不会影响到其他内存的原因。
0~1G虚拟地址给内核用
1~4G虚拟地址给应用程序用(我们这次研究这块)
内核地址空间划分图:

3G~3G+896M:低端内存,直接映射 虚拟地址 = 3G + 物理地址(虚拟地址连续,物理地址也连续)
细分为:ZONE_DMA、ZONE_NORMAL
分配方式:
1. kmalloc:小内存分配,slab算法
2. get_free_page:整页分配,2的n次方页,n最大为10大于3G+896M:高端内存
细分为:vmalloc区、持久映射区、固定映射区
分配方式:
vmalloc:虚拟地址连续,物理地址不连续二、内核中常用动态分配
2.1 kmalloc
函数原型:
void *kmalloc(size_t size, gfp_t flags);kmalloc() 申请的内存位于直接映射区域,而且在物理上也是连续的,它们与真实的物理地址只有一个固定的偏移,因为存在较简单的转换关系,所以对申请的内存大小有限制,不能超过128KB。
较常用的 flags(分配内存的方法):
-
GFP_ATOMIC —— 分配内存的过程是一个原子过程,分配内存的过程不会被(高优先级进程或中断)打断;
-
GFP_KERNEL —— 正常分配内存;
-
GFP_DMA —— 给 DMA 控制器分配内存,需要使用该标志(DMA要求分配虚拟地址和物理地址连续)。
flags 的参考用法:
|– 进程上下文,可以睡眠 GFP_KERNEL
|– 异常上下文,不可以睡眠 GFP_ATOMIC
| |– 中断处理程序 GFP_ATOMIC
| |– 软中断 GFP_ATOMIC
| |– Tasklet GFP_ATOMIC
|– 用于DMA的内存,可以睡眠 GFP_DMA | GFP_KERNEL
|– 用于DMA的内存,不可以睡眠 GFP_DMA |GFP_ATOMIC
对应的内存释放函数为:
void kfree(const void *objp);
void *kzalloc(size_t size, gfp_t flags)2.2 vmalloc
void *vmalloc(unsigned long size);vmalloc() 函数则会在虚拟内存空间给出一块连续的内存区,但这片连续的虚拟内存在物理内存中并不一定连续。由于 vmalloc() 没有保证申请到的是连续的物理内存,因此对申请的内存大小没有限制,如果需要申请较大的内存空间就需要用此函数了。
对应的内存释放函数为:
void vfree(const void *addr);注意:vmalloc() 和 vfree() 可以睡眠,因此不能从异常上下文调用。
2.3 kmalloc & vmalloc 的比较
kmalloc()、kzalloc()、vmalloc() 的共同特点是:
-
用于申请内核空间的内存;
-
内存以字节为单位进行分配;
-
所分配的内存虚拟地址上连续;
kmalloc()、kzalloc()、vmalloc() 的区别是:
-
kzalloc 是强制清零的 kmalloc 操作;(以下描述不区分 kmalloc 和 kzalloc)
-
kmalloc 分配的内存大小有限制(128KB),而 vmalloc 没有限制;
-
kmalloc 可以保证分配的内存物理地址是连续的,但是 vmalloc 不能保证;
-
kmalloc 分配内存的过程可以是原子过程(使用 GFP_ATOMIC),而 vmalloc 分配内存时则可能产生阻塞;
-
kmalloc 分配内存的开销小,因此 kmalloc 比 vmalloc 要快;
一般情况下,内存只有在要被 DMA 访问的时候才需要物理上连续,但为了性能上的考虑,内核中一般使用 kmalloc(),而只有在需要获得大块内存时才使用 vmalloc()。
2.4 分配选择原则:
-
小内存(< 128k)用kmalloc,大内存用vmalloc或get_free_page
-
如果需要比较大的内存,并且要求使用效率较高时用get_free_page,否则用vmalloc
三、IO访问-------访问外设控制器的寄存器
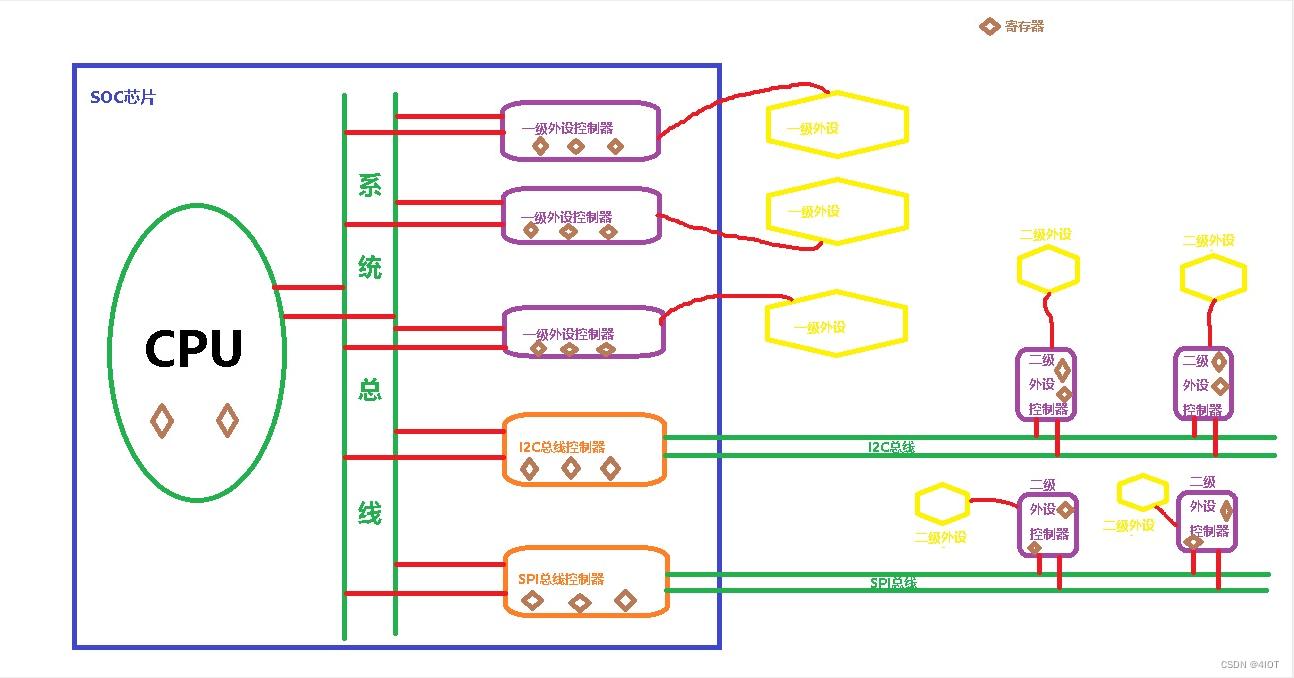 访问外设控制器的寄存器两种方式:
访问外设控制器的寄存器两种方式:
-
IO端口:X86上用IO指令访问
-
IO内存:外设寄存器在SOC芯片手册上都有相应物理地址
IO内存访问接口:
static inline void __iomem *ioremap(unsigned long offset, unsigned long size)
/*
功能:实现IO管脚的映射
参数:offset:该管脚的偏移地址
Size:该管脚映射空间的大小
返回值:成功返回映射的虚拟地址,失败NULL
*/
static inline void iounmap(volatile void __iomem *addr)
/*
功能:解除io管脚的映射
参数:addr:io管脚映射的地址
*/
unsigned readb(void *addr);//1字节 或ioread8(void *addr)
unsigned readw(void *addr);//2字节 或ioread16(void *addr)
unsigned readl(void *addr);//4字节 或ioread32(void *addr)
/*
功能:读取寄存器的值
参数:addr 地址
返回值:读到的数据
*/
void writeb(unsigned value, void *addr);//1字节 或iowrite8(u8 value, void *addr)
void writew(unsigned value, void *addr);//2字节 或iowrite16(u16 value, void *addr)
void writel(unsigned value, void *addr);//4字节 或iowrite32(u32 value, void *addr)
/*
功能:向指定的寄存器中,写入数据。
参数:value:待写入寄存器中的数据
Address:寄存器的虚拟地址
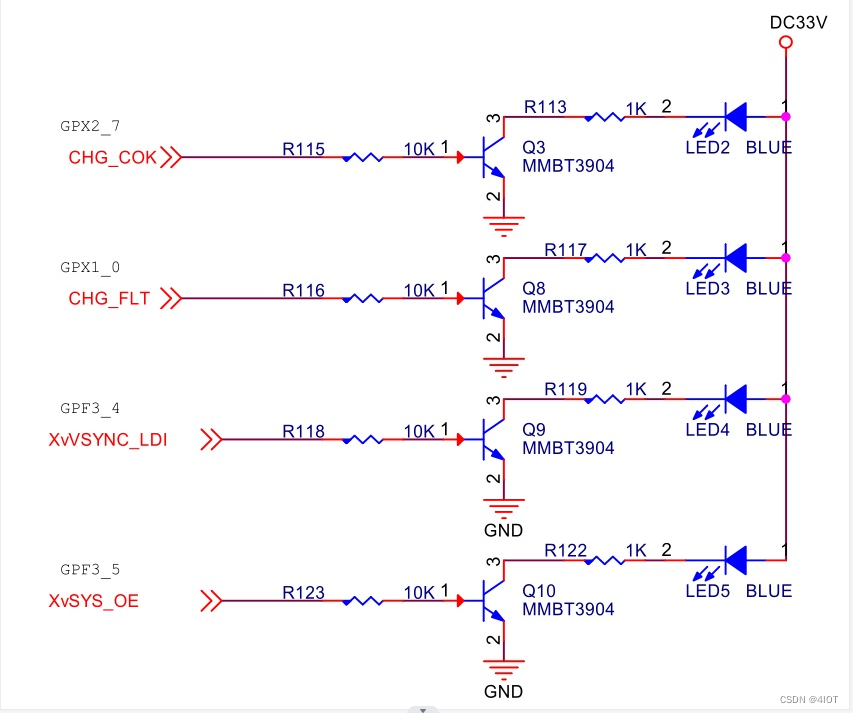
*/四、led驱动
-
读原理图
-
查阅SOC芯片手册
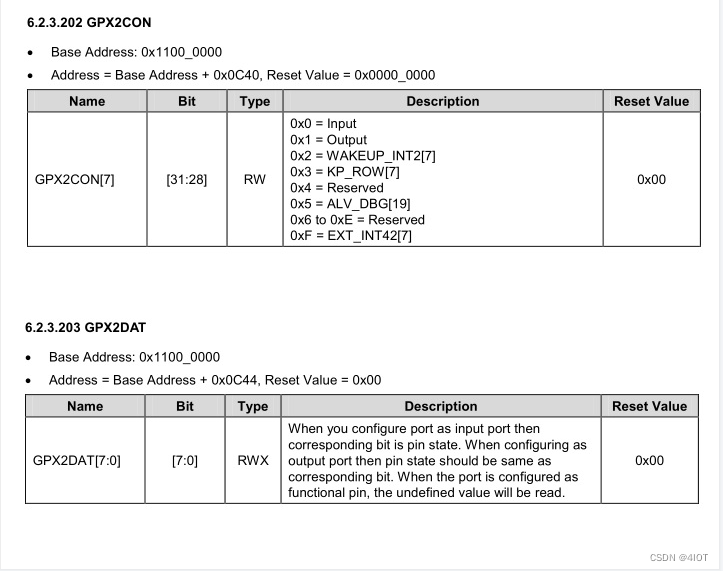
GPX2_7 led2 GPX2CON----0x11000C40---28~31-----0001 GPX2DAT-----0x11000C44-----7
GPX1_0 led3 GPX1CON----0x11000C20---0~3-----0001 GPX1DAT----0x11000C24-----0
GPF3_4 led4 GPF3CON----0x114001E0---16~19-----0001 GPF3DAT----0x114001E4-----4
GPF3_5 led5 GPF3CON----0x114001E0---20~23-----0001 GPF3DAT----0x114001E4-----5
五、示例
实现led驱动,点亮关闭led
leddrv.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/slab.h>
#include <linux/mm.h>
#include <linux/io.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>
#include "leddrv.h"
#define GPX1CON 0x11000C20
#define GPX1DAT 0x11000C24
#define GPX2CON 0x11000C40
#define GPX2DAT 0x11000C44
#define GPF3CON 0x114001E0
#define GPF3DAT 0x114001E4
int major = 11;
int minor = 0;
int myled_num = 1;
struct myled_dev
{
struct cdev mydev;
volatile unsigned long *pled2_con;
volatile unsigned long *pled2_dat;
volatile unsigned long *pled3_con;
volatile unsigned long *pled3_dat;
volatile unsigned long *pled4_con;
volatile unsigned long *pled4_dat;
volatile unsigned long *pled5_con;
volatile unsigned long *pled5_dat;
/*
volatile 防止优化。对这块指针指向的内存,有时候cpu会把外设寄存器中的值读到内部寄存器中,方便下次读的时候更快.加了voltatile就不会优化,否则cpu可能会从内部寄存器中读取,而不是去外设寄存器中读取。
*/
};
struct myled_dev *pgmydev = NULL;
int myled_open(struct inode *pnode,struct file *pfile)
{
pfile->private_data =(void *) (container_of(pnode->i_cdev,struct myled_dev,mydev));
return 0;
}
int myled_close(struct inode *pnode,struct file *pfile)
{
return 0;
}
void led_on(struct myled_dev *pmydev,int ledno)
{
switch(ledno)
{
case 2:
writel(readl(pmydev->pled2_dat) | (0x1 << 7),pmydev->pled2_dat);
break;
case 3:
writel(readl(pmydev->pled3_dat) | (0x1),pmydev->pled3_dat);
break;
case 4:
writel(readl(pmydev->pled4_dat) | (0x1 << 4),pmydev->pled4_dat);
break;
case 5:
writel(readl(pmydev->pled5_dat) | (0x1 << 5),pmydev->pled5_dat);
break;
}
}
void led_off(struct myled_dev *pmydev,int ledno)
{
switch(ledno)
{
case 2:
writel(readl(pmydev->pled2_dat) & (~(0x1 << 7)),pmydev->pled2_dat);
break;
case 3:
writel(readl(pmydev->pled3_dat) & (~(0x1)),pmydev->pled3_dat);
break;
case 4:
writel(readl(pmydev->pled4_dat) & (~(0x1 << 4)),pmydev->pled4_dat);
break;
case 5:
writel(readl(pmydev->pled5_dat) & (~(0x1 << 5)),pmydev->pled5_dat);
break;
}
}
long myled_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg)
{
struct myled_dev *pmydev = (struct myled_dev *)pfile->private_data;
if(arg < 2 || arg > 5)
{
return -1;
}
switch(cmd)
{
case MY_LED_ON:
led_on(pmydev,arg);
break;
case MY_LED_OFF:
led_off(pmydev,arg);
break;
default:
return -1;
}
return 0;
}
struct file_operations myops = {
.owner = THIS_MODULE,
.open = myled_open,
.release = myled_close,
.unlocked_ioctl = myled_ioctl,
};
void ioremap_ledreg(struct myled_dev *pmydev)
{
pmydev->pled2_con = ioremap(GPX2CON,4);
pmydev->pled2_dat = ioremap(GPX2DAT,4);
pmydev->pled3_con = ioremap(GPX1CON,4);
pmydev->pled3_dat = ioremap(GPX1DAT,4);
pmydev->pled4_con = ioremap(GPF3CON,4);
pmydev->pled4_dat = ioremap(GPF3DAT,4);
pmydev->pled5_con = pmydev->pled4_con; //最后一个led5不能remap,因为使用的是同一个组寄存器不同的位
pmydev->pled5_dat = pmydev->pled4_dat;
}
void set_output_ledconreg(struct myled_dev *pmydev)
{
writel((readl(pmydev->pled2_con) & (~(0xF << 28))) | (0x1 << 28),pmydev->pled2_con);
writel((readl(pmydev->pled3_con) & (~(0xF))) | (0x1),pmydev->pled3_con);
writel((readl(pmydev->pled4_con) & (~(0xF << 16))) | (0x1 << 16),pmydev->pled4_con);
writel((readl(pmydev->pled5_con) & (~(0xF << 20))) | (0x1 << 20),pmydev->pled5_con);
writel(readl(pmydev->pled2_dat) & (~(0x1 << 7)),pmydev->pled2_dat);
writel(readl(pmydev->pled3_dat) & (~(0x1)),pmydev->pled3_dat);
writel(readl(pmydev->pled4_dat) & (~(0x1 << 4)),pmydev->pled4_dat);
writel(readl(pmydev->pled5_dat) & (~(0x1 << 5)),pmydev->pled5_dat);
}
void iounmap_ledreg(struct myled_dev *pmydev)
{
iounmap(pmydev->pled2_con);
pmydev->pled2_con = NULL;
iounmap(pmydev->pled2_dat);
pmydev->pled2_dat = NULL;
iounmap(pmydev->pled3_con);
pmydev->pled3_con = NULL;
iounmap(pmydev->pled3_dat);
pmydev->pled3_dat = NULL;
iounmap(pmydev->pled4_con);
pmydev->pled4_con = NULL;
iounmap(pmydev->pled4_dat);
pmydev->pled4_dat = NULL;
pmydev->pled5_con = NULL;
pmydev->pled5_dat = NULL;
}
int __init myled_init(void)
{
int ret = 0;
dev_t devno = MKDEV(major,minor);
/*申请设备号*/
ret = register_chrdev_region(devno,myled_num,"myled");
if(ret)
{
ret = alloc_chrdev_region(&devno,minor,myled_num,"myled");
if(ret)
{
printk("get devno failed\n");
return -1;
}
major = MAJOR(devno);//容易遗漏,注意
}
pgmydev = (struct myled_dev *)kmalloc(sizeof(struct myled_dev),GFP_KERNEL);
if(NULL == pgmydev)
{
unregister_chrdev_region(devno,myled_num);
printk("kmalloc failed\n");
return -1;
}
memset(pgmydev,0,sizeof(struct myled_dev)); //这里的memset并非c库的函数,而是内核自己实现的memset函数
/*给struct cdev对象指定操作函数集*/
cdev_init(&pgmydev->mydev,&myops);
/*将struct cdev对象添加到内核对应的数据结构里*/
pgmydev->mydev.owner = THIS_MODULE;
cdev_add(&pgmydev->mydev,devno,myled_num);
/*ioremap*/
ioremap_ledreg(pgmydev);
/*con-register set output*/
set_output_ledconreg(pgmydev);
return 0;
}
void __exit myled_exit(void)
{
dev_t devno = MKDEV(major,minor);
/*iounmap*/
iounmap_ledreg(pgmydev);
cdev_del(&pgmydev->mydev);
unregister_chrdev_region(devno,myled_num);
kfree(pgmydev);
pgmydev = NULL;
}
MODULE_LICENSE("GPL");
module_init(myled_init);
module_exit(myled_exit);
leddrv.h
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include "leddrv.h"
int main(int argc,char *argv[])
{
int fd = -1;
int onoff = 0;
int no = 0;
if(argc < 4)
{
printf("The argument is too few\n");
return 1;
}
sscanf(argv[2],"%d",&onoff);
sscanf(argv[3],"%d",&no);
if(no < 2 || no > 5)
{
printf("len-no is invalid\n");
return 2;
}
fd = open(argv[1],O_RDONLY);
if(fd < 0)
{
printf("open %s failed\n",argv[1]);
return 3;
}
if(onoff)
{
ioctl(fd,MY_LED_ON,no);
}
else
{
ioctl(fd,MY_LED_OFF,no);
}
close(fd);
fd = -1;
return 0;
}
Makefile
ifeq ($(KERNELRELEASE),)
ifeq ($(ARCH),arm)
KERNELDIR ?= /home/linux/Linux_4412/kernel/linux-3.14
ROOTFS ?= /opt/4412/rootfs
else
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
endif
PWD := $(shell pwd)
modules:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
modules_install:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules INSTALL_MOD_PATH=$(ROOTFS) modules_install
clean:
rm -rf *.o *.ko .*.cmd *.mod.* modules.order Module.symvers .tmp_versions
else
CONFIG_MODULE_SIG=n
obj-m += mychar.o
obj-m += mychar_poll.o
obj-m += openonce_atomic.o
obj-m += openonce_spinlock.o
obj-m += mychar_sema.o
obj-m += mychar_mutex.o
obj-m += second.o
obj-m += leddrv.o
endif
testled_app.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include "leddrv.h"
int main(int argc,char *argv[])
{
int fd = -1;
int onoff = 0;
int no = 0;
if(argc < 4)
{
printf("The argument is too few\n");
return 1;
}
sscanf(argv[2],"%d",&onoff);
sscanf(argv[3],"%d",&no);
if(no < 2 || no > 5)
{
printf("len-no is invalid\n");
return 2;
}
fd = open(argv[1],O_RDONLY);
if(fd < 0)
{
printf("open %s failed\n",argv[1]);
return 3;
}
if(onoff)
{
ioctl(fd,MY_LED_ON,no);
}
else
{
ioctl(fd,MY_LED_OFF,no);
}
close(fd);
fd = -1;
return 0;
}
编译ko文件:

编译testled_app






![[LVGL] 可点击的文字label](https://img-blog.csdnimg.cn/direct/88dc00f068a844159272ec1e458ce0b6.png)