文章目录
- 前言
- 1. 元功能包
- 1.1 应用场景
- 1.2 概念
- 1.3 实现
- 2. ROS节点运行管理launch文件
- 2.1 launch文件标签之launch
- 2.2 launch文件标签之node
- 2.3 launch文件标签之include
- 2.4 launch文件标签之remap
- 2.5 launch文件标签之param
- 2.6 launch文件标签之rosparam
- 2.7 launch文件标签之group
- 2.8 launch文件标签之arg
前言
📢本系列将依托赵虚左老师的ROS课程,写下自己的一些心得与笔记。
📢课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ
📢讲义链接:http://www.autolabor.com.cn/book/ROSTutorials/index.html
📢 文章可能存在疏漏的地方,恳请大家指出。
1. 元功能包
1.1 应用场景
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划…等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
1.2 概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 …
1.3 实现
首先:新建一个功能包
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(meta_mine)
find_package(catkin REQUIRED)
catkin_metapackage()
就是保留CMakeLists.txt里的前三句,剩下的都删掉,再加上catkin_metapackage()
注意:
各行之间不能留有空行,否则会失败;第四行后也不要有空行.
navigation的package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format2.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="2">
<name>navigation</name>
<version>1.17.2</version>
<description>
A 2D navigation stack that takes in information from odometry, sensor
streams, and a goal pose and outputs safe velocity commands that are sent
to a mobile base.
</description>
<maintainer email="mfergs7@gmail.com">Michael Ferguson</maintainer>
<maintainer email="davidvlu@gmail.com">David V. Lu!!</maintainer>
<maintainer email="ahoy@fetchrobotics.com">Aaron Hoy</maintainer>
<author>contradict@gmail.com</author>
<author>Eitan Marder-Eppstein</author>
<license>BSD,LGPL,LGPL (amcl)</license>
<url>http://wiki.ros.org/navigation</url>
<buildtool_depend>catkin</buildtool_depend>
<exec_depend>amcl</exec_depend>
<exec_depend>base_local_planner</exec_depend>
<exec_depend>carrot_planner</exec_depend>
<exec_depend>clear_costmap_recovery</exec_depend>
<exec_depend>costmap_2d</exec_depend>
<exec_depend>dwa_local_planner</exec_depend>
<exec_depend>fake_localization</exec_depend>
<exec_depend>global_planner</exec_depend>
<exec_depend>map_server</exec_depend>
<exec_depend>move_base</exec_depend>
<exec_depend>move_base_msgs</exec_depend>
<exec_depend>move_slow_and_clear</exec_depend>
<exec_depend>navfn</exec_depend>
<exec_depend>nav_core</exec_depend>
<exec_depend>rotate_recovery</exec_depend>
<exec_depend>voxel_grid</exec_depend>
<export>
<metapackage/>
</export>
</package>
navigation的CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(navigation)
find_package(catkin REQUIRED)
catkin_metapackage()
2. ROS节点运行管理launch文件
概念
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用
简化节点的配置与启动,提高ROS程序的启动效率。
使用
以 turtlesim 为例演示
1.新建launch文件
在功能包下添加 launch目录, 目录下新建 xxxx.launch 文件,编辑 launch 文件
<launch>
<node pkg="helloworld" type="demo_hello" name="hello" output="screen" />
<node pkg="turtlesim" type="turtlesim_node" name="t1"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="key1" />
</launch>
2.调用 launch 文件
roslaunch 包名 xxx.launch
注意:roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
2.1 launch文件标签之launch
1.属性
- deprecated = "弃用声明"
告知用户当前 launch 文件已经弃用
2.子级标签
所有其它标签都是launch的子级
2.2 launch文件标签之node
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
1.属性
| 属性 | 说明 |
|---|---|
| pkg=“包名” | 节点所属的包 |
| type=“nodeType” | 节点类型(与之相同名称的可执行文件) |
| name=“nodeName” | 节点名称(在 ROS 网络拓扑中节点的名称) |
| args=“xxx xxx xxx” (可选) | 将参数传递给节点 |
| machine=“机器名” | 在指定机器上启动节点 |
| respawn=“true / false” (可选) | 如果节点退出,是否自动重启 |
| respawn_delay=" N" (可选) | 如果 respawn 为 true, 那么延迟 N 秒后启动节点 |
| required=“true/false” (可选) | 该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch |
| ns=“xxx” (可选) | 在指定命名空间 xxx 中启动节点 |
| clear_params="true | false" (可选) |
| output="log | screen" (可选) |
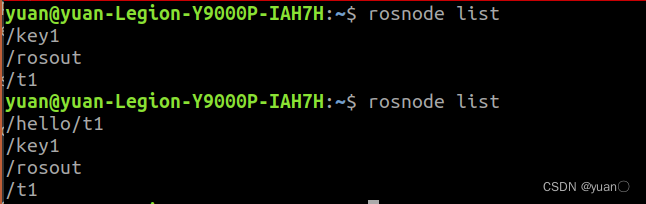
ns="xxx" (可选)在指定命名空间 xxx 中启动节点
ns主要用于设置节点的命名空间,避免重名问题
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" ns="hello"/>
2.子级标签
| 属性 | 说明 |
|---|---|
| env | 环境变量设置 |
| remap | 重映射节点名称 |
| rosparam | 参数设置 |
| param | 参数设置 |
2.3 launch文件标签之include
include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
1.属性
| 属性 | 说明 |
|---|---|
| file=“$(find 包名)/xxx/xxx.launch” | 要包含的文件路径 |
| ns=“xxx” (可选) | 在指定命名空间导入文件 |
<!-- 需要复用 start_01.launch-->
<launch>
<include file="$(find hellovscode)/launch/start_01.launch"/>
</launch>
<include file="$(find 功能包)/launch/所需要include的launch"/>
2.子级标签
| 属性 | 说明 |
|---|---|
| env | 环境变量设置 |
| arg | 将参数传递给被包含的文件 |
2.4 launch文件标签之remap
用于话题重命名
1.属性
| 属性 | 说明 |
|---|---|
| from=“xxx” | 原始话题名称 |
| to=“yyy” | 目标名称 |
这里插入一下:
键盘控制在ROS中运用频繁,但turtlesim中的键盘控制并不非常实用,ROS的teleop_twist_keyboard功能包具有较好的键盘控制功能.
melodic版本的安装命令如下:
sudo apt-get install ros-melodic-teleop-twist-keyboard
运行方式:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
启动乌龟GUI节点之后,再启动键盘控制,运行如下:
 话题/cmd_vel未能连接上,用
话题/cmd_vel未能连接上,用rostopic list查看话题名称,发现乌龟中的话题名称为/turtle1/cmd_vel,话题名称不一致.所以无法连接上.

这时就需要将话题名称进行修改,就运用到remap的功能了.(注意:第三行末尾不加"/")
<launch>
<!-- 乌龟GUI-->>
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" >
<remap from = "/turtle1/cmd_vel" to = "/cmd_vel"/>
再次运行,出现以下信息,就可以控制运动了.
Reading from the keyboard and Publishing to Twist!
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.5 turn 1.0
2.5 launch文件标签之param
<param>标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在<node>标签中时,相当于私有命名空间。
1.属性
| 属性 | 说明 |
|---|---|
| name=“命名空间/参数名” | 参数名称,可以包含命名空间 |
| value=“xxx” (可选) | 定义参数值,如果此处省略,必须指定外部文件作为参数源 |
| type=“str / int / double / bool/yaml” (可选) | 指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下: ①如果包含 ‘.’ 的数字解析未浮点型,否则为整型 ②" true" 和 “false” 是 bool 值(不区分大小写) ③其他是字符串 |
有两种设置方式:
<launch>
<!-- launch文件下node外-->
<param name="param_A" type="int" value="1"/>
<!-- 乌龟GUI-->>
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" >
<remap from = "/turtle1/cmd_vel" to = "/cmd_vel"/>
<!-- node下-->
<param name="param_B" type="int" value="1"/>
</node>
<!-- 乌龟键盘控制-->>
<node pkg="turtlesim" type="turtle_teleop_key" name="key1" output="screen" />
</launch>
在标签中时,相当于私有命名空间"/t1"
2.6 launch文件标签之rosparam
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
1.属性
| 属性 | 说明 |
|---|---|
| command=“load / dump / delete” (可选,默认 load) | 加载、导出或删除参数 |
| file=“$(find xxxxx)/xxx/yyy…” | 加载或导出到的 yaml 文件 |
| param=“参数名称” | |
| ns=“命名空间” (可选) |
参数的导入同样有两种格式
yaml 内容
bg_R: 100
bg_G: 50
bg_B: 255
注意冒号后面要加空格
<!-- launch文件下node外-->
<rosparam command="load" file="$(find hellovscode)/launch/params.yaml"/>
<!-- 乌龟GUI-->>
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" >
<remap from = "/turtle1/cmd_vel" to = "/cmd_vel"/>
<!-- node下-->
<param name="param_B" type="int" value="1"/>
<rosparam command="load" file="$(find hellovscode)/launch/params.yaml"/>
</node>
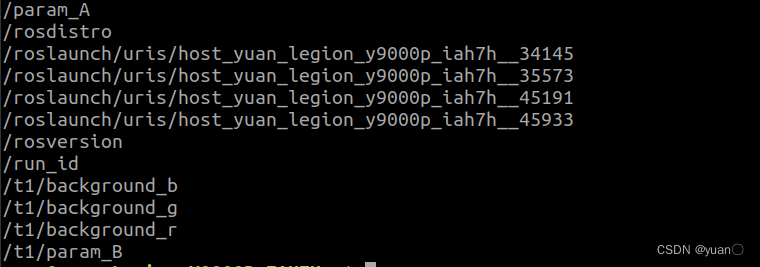
 参数的导出
参数的导出
<rosparam command="dump" file="$(find hellovscode)/launch/params1.yaml"/>
params1.yaml文件内容
bg_B: 255
bg_G: 50
bg_R: 100
param_A: 1
rosdistro: 'melodic
'
roslaunch:
uris: {host_yuan_legion_y9000p_iah7h__34145: 'http://yuan-Legion-Y9000P-IAH7H:34145/',
host_yuan_legion_y9000p_iah7h__35573: 'http://yuan-Legion-Y9000P-IAH7H:35573/',
host_yuan_legion_y9000p_iah7h__45191: 'http://yuan-Legion-Y9000P-IAH7H:45191/',
host_yuan_legion_y9000p_iah7h__45741: 'http://yuan-Legion-Y9000P-IAH7H:45741/',
host_yuan_legion_y9000p_iah7h__45933: 'http://yuan-Legion-Y9000P-IAH7H:45933/',
host_yuan_legion_y9000p_iah7h__46793: 'http://yuan-Legion-Y9000P-IAH7H:46793/'}
rosversion: '1.14.13
'
run_id: 2ab008c6-8c3a-11ed-946b-0242c2614154
t1: {background_b: 255, background_g: 86, background_r: 69, bg_B: 255, bg_G: 50, bg_R: 100,
param_B: 1}
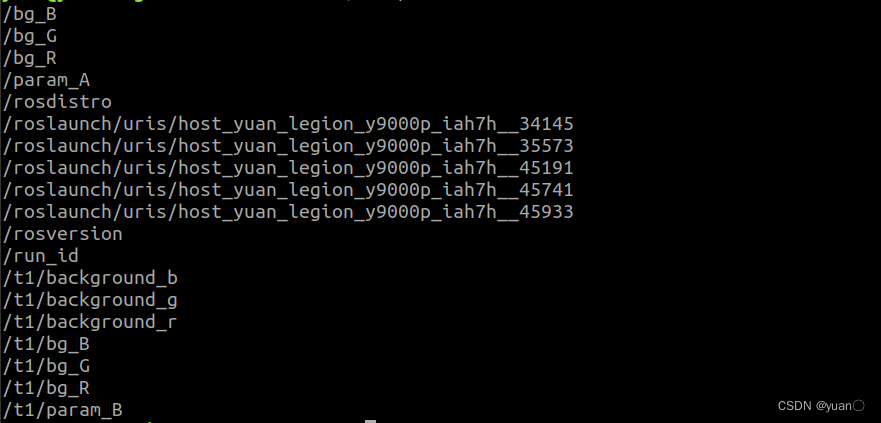
可能会出现参数不完全的情况
需要新建一个launch文件(dump.launch):
<launch>
<rosparam command="dump" file="$(find hellovscode)/launch/params1.yaml"/>
</launch>
先运行带参数的launch文件,再运行dump.launch,最后会获得完整的参数
2.7 launch文件标签之group
<group>标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
1.属性
| 属性 | 说明 |
|---|---|
| ns=“名称空间” (可选) | |
| clear_params=“true / false” (可选) | 启动前,是否删除组名称空间的所有参数(慎用…此功能危险) |
2.子级标签
除了launch 标签外的其他标签
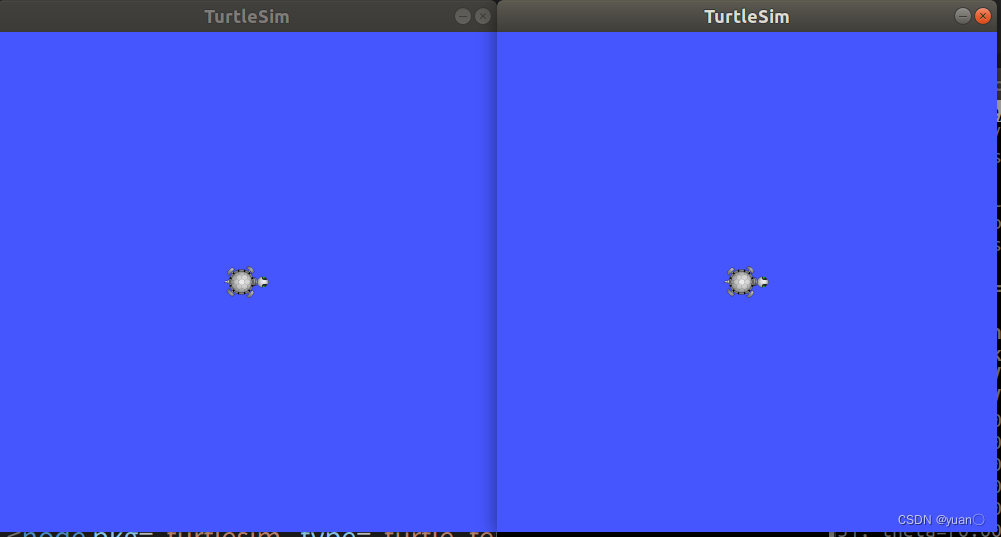
启动两对乌龟 GUI与键盘控制节点
<launch>
<!-- 启动两对乌龟 GUI与键盘控制节点-->
<group ns="first">
<!-- 乌龟GUI-->>
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" ns="hello"/>
<!-- 乌龟键盘控制-->>
<node pkg="turtlesim" type="turtle_teleop_key" name="key1" />
</group>
<group ns="second">
<!-- 乌龟GUI-->>
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" ns="hello"/>
<!-- 乌龟键盘控制-->>
<node pkg="turtlesim" type="turtle_teleop_key" name="key1" />
</group>
</launch>
2.8 launch文件标签之arg
<arg>标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
1.属性
| 属性 | 说明 |
|---|---|
| name=“参数名称” | |
| default=“默认值” (可选) | |
| value=“数值” (可选) | 不可以与 default 并存 |
| doc=“描述” | 参数说明 |
launch文件传参语法实现
<launch>
<!-- 需求:演示arg的使用,需要设置多个参数,这些参数使用的是同一个值 -->
<arg name="car_length" default="0.55"/>
<param name="A" value="$(arg car_length)"/>
<param name="B" value="$(arg car_length)"/>
<param name="C" value="$(arg car_length)"/>
</launch>
命令行调用launch传参
roslaunch hello.launch xxx:=值