本篇博客是本人参加Datawhale组队学习第四次任务的笔记
【教程地址】https://github.com/datawhalechina/joyrl-book
【强化学习库JoyRL】https://github.com/datawhalechina/joyrl/tree/main
【JoyRL开发周报】 https://datawhale.feishu.cn/docx/OM8fdsNl0o5omoxB5nXcyzsInGe?from=from_copylink
【教程参考地址】https://github.com/datawhalechina/easy-rl
文章目录
- DDPG算法
- DPG 方法
- DDPG 算法
- DDPG 算法的优缺点
- TD3 算法
- 双Q网络
- 延迟更新
- 躁声正则
- 实战
- 实战:DDPG算法
- 伪代码
- 定义算法
- 定义经验回放
- DDPG_HER算法
- 模型训练与测试
- 定义环境
- 可视化训练
- 实战:TD3 算法
- 练习
- 总结
DDPG算法
深度确定性策略梯度算法(deep deterministic policy gradient,DDPG)
- 初衷其实是DQN算法的一个连续动作空间版本扩展
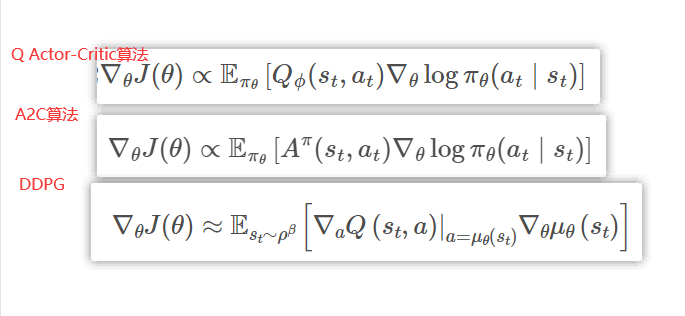
- DDPG算法的时候发现其在形式上更像Actor-Critic的架构
DPG 方法
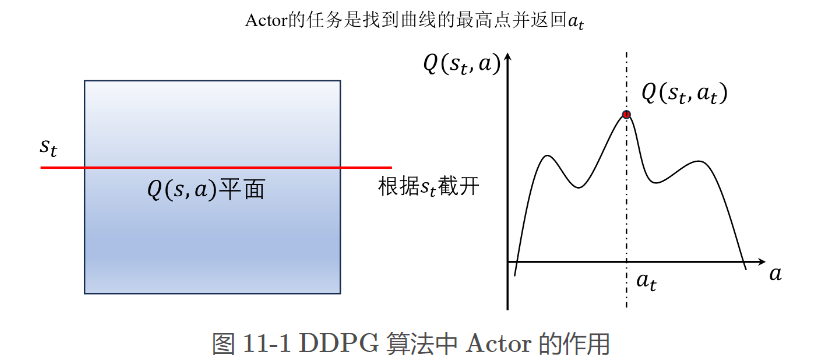
- 将选择动作的过程变成一个直接从状态映射到具体动作的函数 μ θ ( s ) \mu_\theta (s) μθ(s)
- 算法并没有做真正意义上的梯度更新,只是在寻找最大值,本质上还是DQN算法的思路
DDPG算法中Critic结构会同时包含状态和动作输入,而不是Actor-Critic算法中那样只包含状态
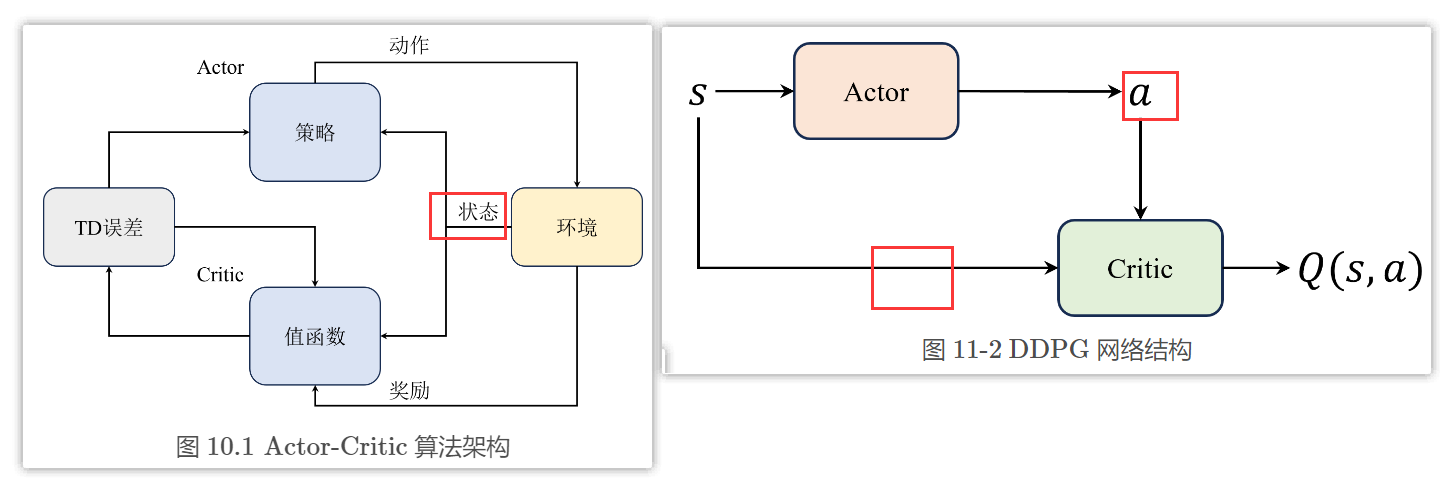
- 这里相当于是把 DQN \text{DQN} DQN 算法中 ε − greedy \varepsilon-\text{greedy} ε−greedy 策略函数部分换成了 Actor \text{Actor} Actor
- 这里的 μ θ ( s ) \mu_\theta (s) μθ(s) 输出的是一个动作值,而不是像 Actor-Critic \text{Actor-Critic} Actor-Critic 章节中提到的概率分布 π θ ( a ∣ s ) \pi_{\theta}(a|s) πθ(a∣s)。
- Q ( s t , a ) Q(s_t, a) Q(st,a)相当于一个Critic网络,将状态和动作作为输入,并且输出一个值
DDPG 算法
强化学习的关键问题:
- 如何提高对值函数的估计
- 如何提高探索以及平衡探索-利用的问题
引入噪声的作用就是为了在不破坏系统的前提下,提高系统运行的抗干扰性,实际上是在解决探索的问题。
DDPG与Noisy DQN中噪声的区别:
- Noisy DQN在网络层中引入噪声
- DDPG在动作中引入噪声
那DDPG中引入的是什么噪声呢?DDPG使用的其实是一种叫做 Ornstein-Uhlenbeck \text{Ornstein-Uhlenbeck} Ornstein-Uhlenbeck 的噪声,简称 OU \text{OU} OU 噪声。 OU \text{OU} OU 噪声是一种具有回归特性的随机过程,其与高斯噪声相比的优点在于:
探索性: OU \text{OU} OU 噪声具有持续的、自相关的特性。相比于独立的高斯噪声, OU \text{OU} OU噪声更加平滑,并且在训练过程中更加稳定。这种平滑特性使得OU噪声有助于探索更广泛的动作空间,并且更容易找到更好的策略。
控制幅度: OU \text{OU} OU 噪声可以通过调整其参数来控制噪声的幅度。在 DDPG \text{DDPG} DDPG 算法中,可以通过调整 OU \text{OU} OU 噪声的方差来控制噪声的大小,从而平衡探索性和利用性。较大的方差会增加探索性,而较小的方差会增加利用性。
稳定性: OU \text{OU} OU 噪声的回归特性使得噪声在训练过程中具有一定的稳定性。相比于纯粹的随机噪声,在 DDPG \text{DDPG} DDPG算法中使用 OU \text{OU} OU 噪声可以更好地保持动作的连续性,避免剧烈的抖动,从而使得训练过程更加平滑和稳定。
可控性:由于 OU \text{OU} OU噪声具有回归特性,它在训练过程中逐渐回归到均值,因此可以控制策略的探索性逐渐减小。这种可控性使得在训练的早期增加探索性,然后逐渐减小探索性,有助于更有效地进行训练。
在简单的环境中,它跟使用简单的高斯噪声甚至不用噪声的效果是差不多的,只有在复杂的环境中才会体现出来区别,可以灵活选择噪声。
OU \text{OU} OU 噪声主要由两个部分组成:随机高斯噪声和回归项,其数学定义如式如下:
d x t = θ ( μ − x t ) d t + σ d W t d x_t=\theta\left(\mu-x_t\right) d t+\sigma d W_t dxt=θ(μ−xt)dt+σdWt
\qquad 其中 x t x_t xt 是 OU \text{OU} OU 过程在时间 t t t 的值,即当前的噪声值,这个 t t t 也是强化学习中的时步( time step \text{time step} time step )。 μ \mu μ 是回归到的均值,表示噪声在长时间尺度上的平均值。 θ \theta θ 是 OU \text{OU} OU 过程的回归速率,表示噪声向均值回归的速率。 σ \sigma σ 是 OU \text{OU} OU 过程的扰动项,表示随机高斯噪声的标准差。 d W t dW_t dWt 是布朗运动( Brownian motion \text{Brownian motion} Brownian motion )或者维纳过程( Wiener process \text{Wiener process} Wiener process ),是一个随机项,表示随机高斯噪声的微小变化。
DDPG 算法的优缺点
-
算法的优点主要有:
- 缓解了连续动作空间中的高方差问题
- 高效的梯度优化
- 经验回放和目标网络
-
缺点:
- 只适用于连续动作空间
- 高度依赖超参数
- 高度敏感的初始条件
- 由于采用了确定性策略,容易陷入局部最优
TD3 算法
TD3算法,英文全称为twin delayed DDPG,中文全称为双延迟确定性策略梯度算法。
相比于DDPG算法的改进:
- 双 Q Q Q 网络,体现在名字中的 twin \text{twin} twin
- 延迟更新,体现在名字中的 delayed \text{delayed} delayed
- 躁声正则( noise regularisation \text{noise regularisation} noise regularisation )
双Q网络
思想:在DDPC算法中的Critic网络上再加一层,这样就形成了两个Critic网络
- DQN算法的过估计主要来源于两个方面:自举 (Bootstrap)和最大化,DDPG算法也是如此
- 如果Bootstrap是均匀的,对于智能体最终的决策不会带来影响;如果是非均匀的,对于智能体最终的决策会带来显著影响。然而实际上网络的Bootstrap通常是非均匀的。
- 最大化操作会使得网络的估计值大于真实值,从而造成网络过估计
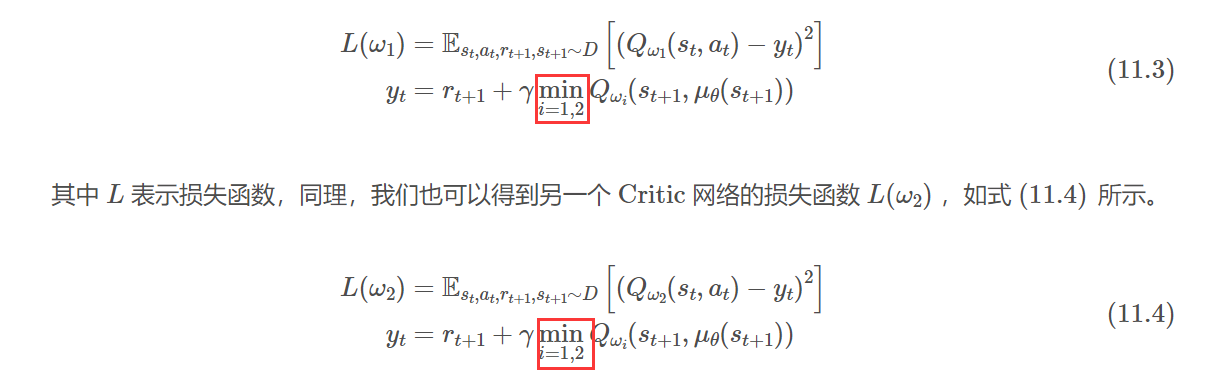
双重网络是解决最大化问题的有效方法。在TD3算法中,作者引入了两套相同网络架构的Critic网络。计算目标值时,会利用二者间的较小值来估计下一个状态动作对的状态动作价值,从而可以有效避免最大化问题带来的高估。
延迟更新
这里的延迟更新指的是Actor网络的延迟更新,即Critic网络更新多次之后再对Actor网络进行更新。这个想法其实是非常直观的,因为Actor网络是通过最大化累积期望回报来更新的,它需要利用Critic网络来进行评估。如果Critic网络非常不稳定,那么Actor网络自然也会出现震荡。
因此,我们可以让Critic网络的更新频率高于Actor网络,即等待Critic网络更加稳定之后再来帮助Actor网络更新。在实践中,Actor的更新频率一般要比Critic的更新频率低一个数量级,例如Critic每更新10次,Actor只更新1次。
Critic就好比领导,Actor则好比员工,领导不断给员工下达目标,员工不断地去完成目标,如果领导的决策经常失误,那么员工就很容易像无头苍蝇一样不知道该完成哪些目标.
因此,一个好的解决方式就是让领导学得比员工更快,领导学得更快了之后下达目标的失误率就会更低,这样员工就能够更好地完成目标了,从而提高整个团队的效率。
躁声正则
延迟更新只是让Critic带来的误差不要过分地影响到了Actor,而没有考虑改进Critic本身的稳定性。当更新Critic网络时,使用确定性策略的学习目标极易受到函数逼近误差的影响,从而导致目标估计的方差大,估计值不准确。这种诱导方差可以通过正则化来减少,因此作者模仿SARSA的学习更新,引入了一种深度价值学习的正则化策略——目标策略平滑。
这种方法主要强调:类似的行动应该具有类似的价值,这里的噪声是在Critic网络上引入的,而不是在输出动作上引入的,因此它跟DDPG算法中的噪声是不一样的
具体的实现:
- 利用目标动作周围的区域来计算目标值,从而有利于平滑估计值
- 在实际操作时,我们可以通过向目标动作中添加少量随机噪声,并在小批量中求平均值,来近似动作的期望。
- 添加的噪声是服从正态分布的,并且对采样的噪声做了裁剪,以保持目标接近原始动作

实战
实战:DDPG算法
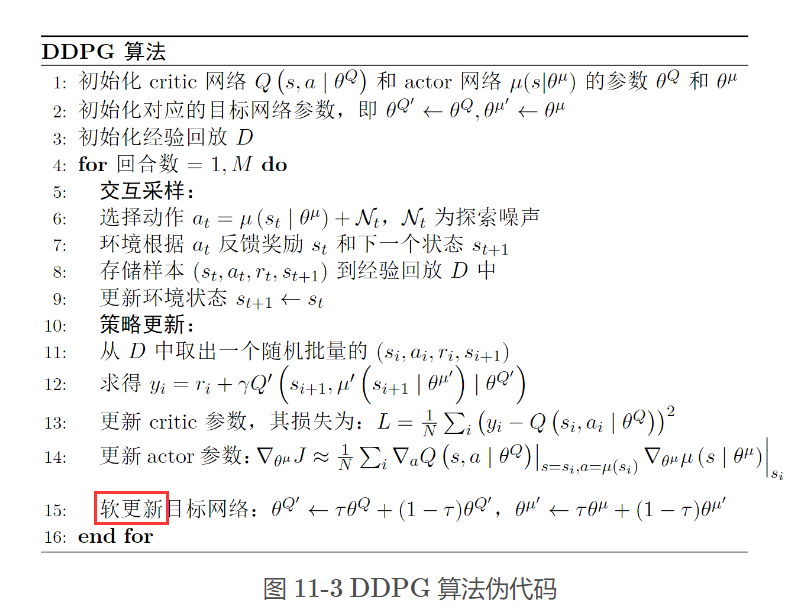
伪代码
注意在第15步中 DDPG算法将当前网络参数复制到目标网络的方式是软更新,即每次一点点地将参数复制到目标网络中,与之对应的是DQN算法中的硬更新。软更新的好处是更加平滑缓慢,可以避免因权重更新过于迅速而导致的震荡,同时降低训练发散的风险。
定义算法
建立Actor网络、Critic网络和OU噪声类
class Actor(nn.Module):
def __init__(self, n_states, n_actions, hidden_dim, init_w=3e-3):
'''
actor 模型的结构定义
Args:
n_states (int): 输入状态的维度
n_actions (int): 可执行动作的数量
hidden_dim (int): 隐含层数量
init_w (float, optional): 均匀分布初始化权重的范围
'''
super(Actor, self).__init__()
self.linear1 = nn.Linear(n_states, hidden_dim)
self.linear2 = nn.Linear(hidden_dim, hidden_dim)
self.linear3 = nn.Linear(hidden_dim, n_actions)
self.linear3.weight.data.uniform_(-init_w, init_w)
self.linear3.bias.data.uniform_(-init_w, init_w)
def forward(self, x):
x = F.relu(self.linear1(x))
x = F.relu(self.linear2(x))
x = torch.tanh(self.linear3(x))
return x
class Critic(nn.Module):
def __init__(self, n_states, n_actions, hidden_dim, init_w=3e-3):
'''
critic 模型的结构定义
Args:
n_states (int): 输入状态的维度
n_actions (int): 可执行动作的数量
hidden_dim (int): 隐含层数量
init_w (float, optional): 均匀分布初始化权重的范围
'''
super(Critic, self).__init__()
self.linear1 = nn.Linear(n_states + n_actions, hidden_dim)
self.linear2 = nn.Linear(hidden_dim, hidden_dim)
self.linear3 = nn.Linear(hidden_dim, 1)
# 随机初始化为较小的值
self.linear3.weight.data.uniform_(-init_w, init_w)
self.linear3.bias.data.uniform_(-init_w, init_w)
def forward(self, state, action):
# 按维数1拼接
x = torch.cat([state, action], 1)
x = F.relu(self.linear1(x))
x = F.relu(self.linear2(x))
x = self.linear3(x)
return x
class OUNoise(object):
'''
构造 Ornstein–Uhlenbeck 噪声的类
'''
def __init__(self, action_space, mu=0.0, theta=0.15, max_sigma=0.3, min_sigma=0.3, decay_period=100000):
'''
初始化输入参数
Args:
action_space (Union[gym.spaces.box.Box, gym.spaces.discrete.Discrete]): env 中的 action_space
mu (float, optional): 噪声均值
theta (float, optional): 系统对噪声的扰动程度,theta 越大,噪声扰动越小
max_sigma (float, optional): 最大 sigma,用于更新衰变 sigma 值
min_sigma (float, optional): 最小 sigma,用于更新衰变 sigma 值
decay_period (int, optional): 衰变周期
'''
self.mu = mu
self.theta = theta
self.sigma = max_sigma
self.max_sigma = max_sigma
self.min_sigma = min_sigma
self.decay_period = decay_period
self.n_actions = action_space.shape[0] # env环境中可执行动作的数量
self.low = action_space.low # env环境中动作取值的最小值
self.high = action_space.high # env环境中动作取值的最大值
self.reset()
def reset(self):
'''
重置噪声
'''
self.obs = np.ones(self.n_actions) * self.mu # reset the noise
def evolve_obs(self):
'''
更新噪声
Returns:
返回更新后的噪声值
'''
x = self.obs
dx = self.theta * (self.mu - x) + self.sigma * np.random.randn(self.n_actions) # Ornstein–Uhlenbeck process
self.obs = x + dx
return self.obs
def get_action(self, action, t=0):
'''
根据输入的动作,输出加入 OU 噪声后的动作
Args:
action (array): 输入的动作值
t (int, optional): 当前环境已执行的帧数
Returns:
action (float): 返回加入 OU 噪声后的动作
'''
ou_obs = self.evolve_obs()
## 根据env进程(t),通过设定的衰变周期(decay_period),进行更新衰变的sigma值
self.sigma = self.max_sigma - (self.max_sigma - self.min_sigma) * min(1.0, t / self.decay_period)
return np.clip(action + ou_obs, self.low, self.high) # add noise to action
定义经验回放
class ReplayBufferQue:
def __init__(self, capacity: int) -> None:
self.capacity = capacity
self.buffer = deque(maxlen=self.capacity)
def push(self,transitions):
'''_summary_
Args:
trainsitions (tuple): _description_
'''
self.buffer.append(transitions)
def sample(self, batch_size: int, sequential: bool = False):
if batch_size > len(self.buffer):
batch_size = len(self.buffer)
if sequential: # sequential sampling
rand = random.randint(0, len(self.buffer) - batch_size)
batch = [self.buffer[i] for i in range(rand, rand + batch_size)]
return zip(*batch)
else:
batch = random.sample(self.buffer, batch_size)
return zip(*batch)
def clear(self):
self.buffer.clear()
def __len__(self):
return len(self.buffer)
DDPG_HER算法
class DDPG_HER:
def __init__(self, cfg):
'''
构建智能体
Args:
cfg (class): 超参数类 AlgoConfig
'''
self.n_states = cfg.n_states
self.n_actions = cfg.n_actions
self.states_dim = cfg.n_states * 2
self.actions_dim = cfg.n_actions
self.action_space = cfg.action_space # env 中的 action_space
self.ou_noise = OUNoise(self.action_space) # 实例化 构造 Ornstein–Uhlenbeck 噪声的类
self.batch_size = cfg.batch_size
self.gamma = cfg.gamma
self.tau = cfg.tau
self.sample_count = 0 # 记录采样动作的次数
self.update_flag = False # 标记是否更新网络
self.device = torch.device(cfg.device)
self.critic = Critic(self.states_dim, self.actions_dim, hidden_dim=cfg.critic_hidden_dim).to(self.device)
self.target_critic = Critic(self.states_dim, self.actions_dim, hidden_dim=cfg.critic_hidden_dim).to(self.device)
self.actor = Actor(self.states_dim, self.actions_dim, hidden_dim=cfg.actor_hidden_dim).to(self.device)
self.target_actor = Actor(self.states_dim, self .actions_dim, hidden_dim=cfg.actor_hidden_dim).to(self.device).to(
self.device)
## 将 critc 网络的参数赋值给target critic 网络
for target_param, param in zip(self.target_critic.parameters(), self.critic.parameters()):
target_param.data.copy_(param.data)
## 将 actor 网络的参数赋值给target actor 网络
for target_param, param in zip(self.target_actor.parameters(), self.actor.parameters()):
target_param.data.copy_(param.data)
self.critic_optimizer = optim.Adam(self.critic.parameters(), lr=cfg.critic_lr)
self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=cfg.actor_lr)
self.memory = ReplayBufferQue(cfg.buffer_size)
def sample_action(self, state):
'''
根据输入的状态采样动作
Args:
state (array): 输入的状态
Returns:
action (float): 根据状态采样后的动作
'''
self.sample_count += 1
state = torch.tensor(state, device=self.device, dtype=torch.float32).unsqueeze(dim=0)
action_tanh = self.actor(state) # action_tanh is in [-1, 1]
# convert action_tanh to action in the original action space
action_scale = torch.FloatTensor((self.action_space.high - self.action_space.low) / 2.).to(self.device)
action_bias = torch.FloatTensor((self.action_space.high + self.action_space.low) / 2.).to(self.device)
action = action_scale * action_tanh + action_bias
action = action.cpu().detach().numpy()[0]
# add noise to action
action = self.ou_noise.get_action(action, self.sample_count)
return action
@torch.no_grad()
def predict_action(self, state):
'''
根据输入的状态预测下一步的动作
Args:
state (array): 输入的状态
Returns:
action (float): 根据状态采样后的动作
'''
state = torch.tensor(state, device=self.device, dtype=torch.float32).unsqueeze(dim=0)
action_tanh = self.actor(state) # action_tanh is in [-1, 1]
# convert action_tanh to action in the original action space
action_scale = torch.FloatTensor((self.action_space.high - self.action_space.low) / 2.).to(self.device)
action_bias = torch.FloatTensor((self.action_space.high + self.action_space.low) / 2.).to(self.device)
action = action_scale * action_tanh + action_bias
action = action.cpu().detach().numpy()[0]
return action
def update(self):
## 当经验回放池中的数量小于 batch_size 时,直接返回不更新
if len(self.memory) < self.batch_size: # when memory size is less than batch size, return
return
else:
if not self.update_flag:
print("Begin to update!")
self.update_flag = True
## 从经验回放池中采样 batch_size 个样本
state, action, reward, next_state, done = self.memory.sample(self.batch_size)
## 将状态、动作等 array 转为 tensor
state = torch.FloatTensor(np.array(state)).to(self.device)
next_state = torch.FloatTensor(np.array(next_state)).to(self.device)
action = torch.FloatTensor(np.array(action)).to(self.device)
reward = torch.FloatTensor(reward).unsqueeze(1).to(self.device)
done = torch.FloatTensor(np.float32(done)).unsqueeze(1).to(self.device)
## 输入状态及通过 actor 网络 根据该状态输出的动作,计算 critic 网络输出的价值,类似于DQN中的q-value
policy_loss = self.critic(state, self.actor(state))
## 计算均值作为 critic 网络的损失
policy_loss = -policy_loss.mean()
## 根据下一个 timestamp 的状态用 target_actor 网络输出目标动作
next_action = self.target_actor(next_state)
## 输入下一个 timestamp 的状态及目标动作,计算 target_critc 网络输出的目标价值
target_value = self.target_critic(next_state, next_action.detach())
## 根据真实奖励更新目标价值
expected_value = reward + (1.0 - done) * self.gamma * target_value
expected_value = torch.clamp(expected_value, -np.inf, np.inf)
## 输入状态和动作,用 critic 网络计算预估的价值
value = self.critic(state, action)
## 将 critic 网络输出的价值和 target_critic输出并更新后的价值通过MSE进行损失计算
value_loss = nn.MSELoss()(value, expected_value.detach())
## 更新 actor 网络参数
self.actor_optimizer.zero_grad()
policy_loss.backward()
self.actor_optimizer.step()
## 更新 critic 网络参数
self.critic_optimizer.zero_grad()
value_loss.backward()
self.critic_optimizer.step()
## 通过软更新的方法,缓慢更新 target critic 网络的参数
for target_param, param in zip(self.target_critic.parameters(), self.critic.parameters()):
target_param.data.copy_(
target_param.data * (1.0 - self.tau) +
param.data * self.tau
)
## 通过软更新的方法,缓慢更新 target actor 网络的参数
for target_param, param in zip(self.target_actor.parameters(), self.actor.parameters()):
target_param.data.copy_(
target_param.data * (1.0 - self.tau) +
param.data * self.tau
)
def save_model(self, fpath):
'''
保存模型
Args:
fpath (str): 模型存放路径
'''
from pathlib import Path
# create path
Path(fpath).mkdir(parents=True, exist_ok=True)
torch.save(self.actor.state_dict(), f"{fpath}/actor_checkpoint.pt")
def load_model(self, fpath):
'''
根据模型路径导入模型
Args:
fpath (str): 模型路径
'''
actor_ckpt = torch.load(f"{fpath}/actor_checkpoint.pt", map_location=self.device)
self.actor.load_state_dict(actor_ckpt)
模型训练与测试
定义奖励计算函数和目标生成函数
def calcu_reward(new_goal, state, action):
# direcly use observation as goal
goal_cos, goal_sin, goal_thdot = new_goal[0], new_goal[1], new_goal[2]
cos_th, sin_th, thdot = state[0], state[1], state[2]
costs = angle_normalize(np.arccos(goal_cos) - np.arccos(cos_th)) ** 2 + 0.1 * (goal_thdot - thdot) ** 2#+ (goal_sin - sin_th) ** 2
reward = -costs
return reward
def generate_goals(i, episode_cache, sample_num, sample_range = 200):
'''
Input: current steps, current episode transition's cache, sample number
Return: new goals sets
notice here only "future" sample policy
'''
end = (i+sample_range) if i+sample_range < len(episode_cache) else len(episode_cache)
epi_to_go = episode_cache[i:end]
if len(epi_to_go) < sample_num:
sample_trans = epi_to_go
else:
sample_trans = random.sample(epi_to_go, sample_num)
return [np.array(trans[3][:3]) for trans in sample_trans]#episode_cache.append((o,a,r,o2))
def angle_normalize(x):
return ((x + np.pi) % (2 * np.pi)) - np.pi
训练函数与测试函数
def train(cfg, env, agent):
print("开始训练!")
rewards = [] # 记录所有回合的奖励
for i_ep in range(cfg.train_eps):
ep_reward = 0 # reward per episode
ep_step = 0
episode_cache = []
HER_SAMPLE_NUM = cfg.her_sample_num
update_every = cfg.update_every
state, _ = env.reset() # 环境状态
# 随机构造目标
np.random.seed(cfg.seed)
costheta = np.random.rand()
sintheta = np.sqrt(1-costheta**2)
w = 2 * np.random.rand()
goal = np.array([costheta,sintheta,w])
state = np.concatenate((state, goal)) # 结合环境状态和目标,构造新状态
for _ in range(cfg.max_steps):
ep_step += 1
action = agent.sample_action(state) # sample action
next_state, reward, terminated, _, info = env.step(
action) # update env and return transitions under new_step_api of OpenAI Gym
next_state = np.concatenate((next_state, goal)) # 结合下一时间步环境状态和目标,构造新下一时间步状态
reward = calcu_reward(goal, state, action) # 根据目标、状态、动作计算HER奖励
episode_cache.append((state, action, reward, next_state)) # 缓存transitions,便于事后经验回放
agent.memory.push((state, action, reward,
next_state, terminated)) # 将transitions存入经验缓存池
state = next_state # update next state for env
ep_reward += reward #
if terminated:
break
# Hindsight replay: Important operation of HER
for i, transition in enumerate(episode_cache):
new_goals = generate_goals(i, episode_cache, HER_SAMPLE_NUM) # 根据future方法构造新目标
for new_goal in new_goals:
state, action = transition[0], transition[1] # 从transition提取具有目标的状态和动作
reward = calcu_reward(new_goal, state, action) # 根据新目标、状态、动作计算奖励值
state, new_state = transition[0][:3], transition[3][:3] # 从transition提取不包含目标的状态和下一时间步状态
state = np.concatenate((state, new_goal)) # 结合环境状态和生成的新目标,构造新状态
new_state = np.concatenate((new_state, new_goal)) # 结合下一时间步环境状态和生成的新目标,构造新下一时间步状态
agent.memory.push((state, action, reward, new_state, False)) # 将新的transition存入经验缓存池
for _ in range(update_every):
agent.update() # update agent
rewards.append(ep_reward)
print("完成训练!")
return {'rewards':rewards}
def test(cfg, env, agent):
print("开始测试!")
rewards = [] # 记录所有回合的奖励
for i_ep in range(cfg.train_eps):
ep_reward = 0 # reward per episode
ep_step = 0
ep_frames = []
state, _ = env.reset(seed = cfg.seed) # 环境状态
# 随机构造目标
costheta = np.random.rand()
sintheta = np.sqrt(1-costheta**2)
w = 2 * np.random.rand()
goal = np.array([costheta,sintheta,w])
state = np.concatenate((state, goal)) # 结合环境状态和目标,构造新状态
for _ in range(cfg.max_steps):
ep_step += 1
if cfg.render and cfg.render_mode == 'rgb_array': # 用于可视化
frame = env.render()[0]
ep_frames.append(frame)
action = agent.predict_action(state) # sample action
next_state, reward, terminated, _, info= env.step(
action) # update env and return transitions under new_step_api of OpenAI Gym
next_state = np.concatenate((next_state, goal)) # 结合下一时间步环境状态和目标,构造新下一时间步状态
state = next_state # update next state for env
ep_reward += reward
if terminated:
break
rewards.append(ep_reward)
print(f"回合:{i_ep+1}/{cfg.test_eps},奖励:{ep_reward:.2f}")
print("完成测试!")
return {'rewards':rewards}
定义环境
import gymnasium as gym
import os
def all_seed(env,seed = 1):
''' 万能的seed函数
'''
# env.seed(seed) # env config
np.random.seed(seed)
random.seed(seed)
torch.manual_seed(seed) # config for CPU
torch.cuda.manual_seed(seed) # config for GPU
os.environ['PYTHONHASHSEED'] = str(seed) # config for python scripts
# config for cudnn
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.enabled = False
def env_agent_config(cfg):
env = gym.make(cfg.env_name) # 创建环境
all_seed(env,seed=cfg.seed)
n_states = env.observation_space.shape[0]
n_actions = env.action_space.shape[0]
print(f"状态空间维度:{n_states},动作空间维度:{n_actions}")
# 更新n_states和n_actions到cfg参数中
setattr(cfg, 'n_states', n_states)
setattr(cfg, 'n_actions', n_actions)
setattr(cfg, 'action_space', env.action_space)
models = {"actor":Actor(n_states,n_actions,hidden_dim=cfg.actor_hidden_dim),"critic":Critic(n_states,n_actions,hidden_dim=cfg.critic_hidden_dim)}
memory = ReplayBufferQue(cfg.buffer_size) # 创建经验池
agent = DDPG_HER(cfg)
return env,agent
可视化训练
import argparse
import matplotlib.pyplot as plt
import seaborn as sns
class Config:
def __init__(self):
self.algo_name = 'DDPG_HER' # 算法名称
self.env_name = 'Pendulum-v1' # 环境名称
self.new_step_api = True # whether to use new step api of gym
self.wrapper = None # wrapper of environment
self.render = False # whether to render environment
self.render_mode = "human" # 渲染模式, "human" 或者 "rgb_array"
self.mode = "train" # train or test
self.mp_backend = "mp" # 多线程框架,ray或者mp(multiprocessing),默认mp
self.seed = 0 # random seed
self.device = "cpu" # device to use
self.train_eps = 150 # number of episodes for training
self.test_eps = 20 # number of episodes for testing
self.eval_eps = 10 # number of episodes for evaluation
self.eval_per_episode = 5 # evaluation per episode
self.max_steps = 200 # max steps for each episode
self.gamma = 0.99 # 贴现因子,值越大,表示未来的收益占更大的比重
self.critic_lr = 1e-3 # critic 模型的学习率
self.actor_lr = 1e-3 # actor 模型的学习率
self.buffer_size = 10000 # 经验回放池的大小
self.batch_size = 128 # 训练 actor 及 critic 模型的 batch 大小
self.tau = 0.01 # 软更新参数,值越小,表示在更新目标网络参数时,参数变化越小
self.critic_hidden_dim = 256 # critic 网络的隐含层数
self.actor_hidden_dim = 256 # actor 网络的隐含参数
self.her_sample_num = 4 # her抽样数量
self.update_every = 100 # 每代更新次数
def smooth(data, weight=0.9):
'''用于平滑曲线,类似于Tensorboard中的smooth曲线
'''
last = data[0]
smoothed = []
for point in data:
smoothed_val = last * weight + (1 - weight) * point # 计算平滑值
smoothed.append(smoothed_val)
last = smoothed_val
return smoothed
def plot_rewards(rewards,title="learning curve"):
sns.set()
plt.figure() # 创建一个图形实例,方便同时多画几个图
plt.title(f"{title}")
plt.xlim(0, len(rewards), 10) # 设置x轴的范围
plt.xlabel('episodes')
plt.plot(rewards, label='rewards')
plt.plot(smooth(rewards), label='smoothed')
plt.legend()
# 获取参数
cfg = Config()
# 训练
env, agent = env_agent_config(cfg)
res_dic = train(cfg, env, agent)
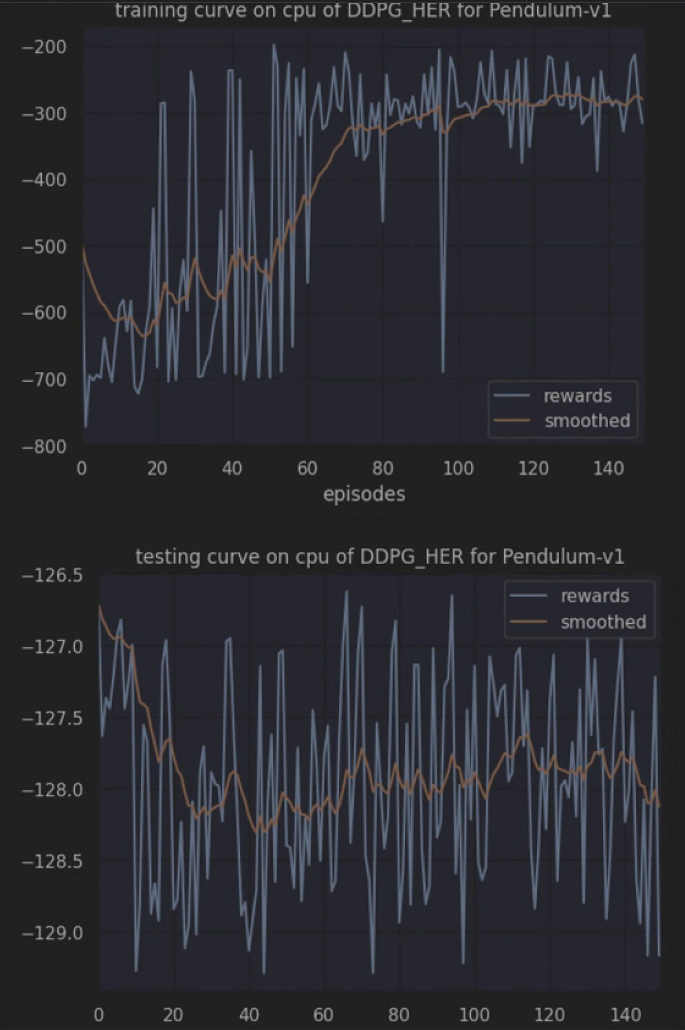
plot_rewards(res_dic['rewards'], title=f"training curve on {cfg.device} of {cfg.algo_name} for {cfg.env_name}")
# 测试
res_dic = test(cfg, env, agent)
plot_rewards(res_dic['rewards'], title=f"testing curve on {cfg.device} of {cfg.algo_name} for {cfg.env_name}") # 画出结果
实战:TD3 算法
TD3算法只是在策略更新上与DDPG算法有所差异,其它地方基本相同。
def update(self):
if len(self.memory) < self.explore_steps: # 当经验回放中不满足一个批量时,不更新策略
return
state, action, reward, next_state, done = self.memory.sample(self.batch_size) # 从经验回放中随机采样一个批量的转移(transition)
# 将数据转换为tensor
state = torch.tensor(np.array(state), device=self.device, dtype=torch.float32)
action = torch.tensor(np.array(action), device=self.device, dtype=torch.float32)
next_state = torch.tensor(np.array(next_state), device=self.device, dtype=torch.float32)
reward = torch.tensor(reward, device=self.device, dtype=torch.float32).unsqueeze(1)
done = torch.tensor(done, device=self.device, dtype=torch.float32).unsqueeze(1)
noise = (torch.randn_like(action) * self.policy_noise).clamp(-self.noise_clip, self.noise_clip) # 构造加入目标动作的噪声
# 计算加入了噪声的目标动作
next_action = (self.actor_target(next_state) + noise).clamp(-self.action_scale+self.action_bias, self.action_scale+self.action_bias)
# 计算两个critic网络对t+1时刻的状态动作对的评分,并选取更小值来计算目标q值
target_q1, target_q2 = self.critic_1_target(next_state, next_action).detach(), self.critic_2_target(next_state, next_action).detach()
target_q = torch.min(target_q1, target_q2)
target_q = reward + self.gamma * target_q * (1 - done)
# 计算两个critic网络对t时刻的状态动作对的评分
current_q1, current_q2 = self.critic_1(state, action), self.critic_2(state, action)
# 计算均方根损失
critic_1_loss = F.mse_loss(current_q1, target_q)
critic_2_loss = F.mse_loss(current_q2, target_q)
self.critic_1_optimizer.zero_grad()
critic_1_loss.backward()
self.critic_1_optimizer.step()
self.critic_2_optimizer.zero_grad()
critic_2_loss.backward()
self.critic_2_optimizer.step()
if self.sample_count % self.policy_freq == 0:
# 延迟策略更新,actor的更新频率低于critic
actor_loss = -self.critic_1(state, self.actor(state)).mean()
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
#目标网络软更新
for param, target_param in zip(self.actor.parameters(), self.actor_target.parameters()):
target_param.data.copy_(self.tau * param.data + (1 - self.tau) * target_param.data)
for param, target_param in zip(self.critic_1.parameters(), self.critic_1_target.parameters()):
target_param.data.copy_(self.tau * param.data + (1 - self.tau) * target_param.data)
for param, target_param in zip(self.critic_2.parameters(), self.critic_2_target.parameters()):
target_param.data.copy_(self.tau * param.data + (1 - self.tau) * target_param.data)
练习
- DDPG \text{DDPG} DDPG 算法是 off-policy \text{off-policy} off-policy 算法吗?为什么?
跟 DQN \text{DQN} DQN 一样, DDPG \text{DDPG} DDPG 算法,主要结合了经验回放、目标网络和确定性策略,是典型的
off-policy \text{off-policy} off-policy 算法。
强化学习中的奇怪概念(一)——On-policy与off-policy
- 软更新相比于硬更新的好处是什么?为什么不是所有的算法都用软更新?
- 好处:
- 平滑目标更新:软更新通过逐渐调整目标网络的参数,使其向主网络的参数靠近,而不是直接复制主网络的参数。这样做可以降低目标的变化幅度,减少了训练中的不稳定性;
- 降低方差;
- 避免振荡:软更新可以减少目标网络和主网络之间的振荡,这有助于更稳定地收敛到良好的策略。
- 缺点:
- 速度:软更新会使目标网络变得更加缓慢;
- 探索和稳定性权衡:一些算法可能更倾向于使用硬更新,因为它们可能需要更频繁地探索新的策略,而不依赖于过去的经验。硬更新允许在每次更新时完全用新策略替代旧策略;
- 算法需求:某些算法可能对硬更新更敏感,而且硬更新可能是这些算法的关键组成部分。综上,软更新和硬更新都有其用途,选择哪种方式取决于具体的问题和算法要求。
- 相比于 DDPG \text{DDPG} DDPG 算法, TD3 \text{TD3} TD3 算法做了哪些改进?请简要归纳。
- 双Q网络: TD3 \text{TD3} TD3 使用了两个独立的 Q \text{Q} Q 网络,分别用于估计动作的价值。这两个Q网络有不同的参数,这有助于减少估计误差,并提高了训练的稳定性;
- 目标策略噪声:与 DDPG \text{DDPG} DDPG 不同, TD3 \text{TD3} TD3 将噪声添加到目标策略,而不是主策略。这有助于减小动作值的过估计误差;
- 目标策略平滑化: TD3 \text{TD3} TD3 使用目标策略平滑化技术,通过对目标策略的参数进行软更新来减小目标策略的变化幅度。这有助于提高稳定性和训练的收敛性。
- 延迟策略更新: TD3 \text{TD3} TD3 引入了延迟策略更新,意味着每隔一定数量的时间步才更新主策略网络。这可以减小策略更新的频率,有助于减少过度优化的风险,提高稳定性。
- TD3 \text{TD3} TD3 算法中 Critic \text{Critic} Critic 的更新频率一般要比 Actor \text{Actor} Actor 是更快还是更慢?为什么?
Critic \text{Critic} Critic 网络的更新频率要比 Actor \text{Actor} Actor
网络更快,即延迟策略更新。延迟策略更新的目的是减小策略更新的频率,以避免过度优化和提高训练的稳定性。因为 Critic \text{Critic} Critic
网络的更新频率更高,它可以更快地适应环境的变化,提供更准确的动作价值估计,从而帮助 Actor \text{Actor} Actor 网络生成更好的策略。
总结
本文主要介绍了强化学习中较为常用的一类算法,即 DDPG和TD3算法,它们虽然在结构上被归类于Actor-Critic算法,但从原理上来说跟DQN算法更为接近。先介绍了DDPG算法,它相当于DQN算法的一个连续动作空间版本扩展,它在DDPG在动作中引入噪声进一步提升了模型的探索能力。
之后介绍了TD3算法,它主要包括了双Q网络、延迟更新和躁声正则。最后进行了代码实战。


![[MQ]常用的mq产品图形管理web界面或客户端](https://img-blog.csdnimg.cn/direct/de1cd254ef1144d9ade10d2dc3a454e7.png)