AI视野·今日CS.Robotics 机器人学论文速览
Thu, 11 Jan 2024
Totally 16 papers
👉上期速览✈更多精彩请移步主页

Daily Robotics Papers
| Analytical Model and Experimental Testing of the SoftFoot: an Adaptive Robot Foot for Walking over Obstacles and Irregular Terrains Authors Cristina Piazza, Cosimo Della Santina, Manuel G. Catalano, Giorgio Grioli, Antonio Bicchi 机器人脚对于保持动态稳定性和行走过程中推动身体至关重要,尤其是在不平坦的地形上。传统上,机器人脚大多设计为平坦且坚硬的金属件,当机器人需要在不规则的地面上行走时,例如在地面上,这就满足了其局限性。石头。虽然人们可能认为在这样的基础上增加合规性就能解决问题,但事实并非如此。为了解决这个问题,我们推出了 SoftFoot,这是一种自适应足部设计,可以增强在不规则地面上的行走性能。所提出的设计是完全被动的,通过适当放置在结构中的滑轮、腱和弹簧系统,根据施加的力改变其形状和刚度。本文概述了 SoftFoot 背后的动机,并描述了导致其最终设计的理论模型。所提出的系统已经过实验测试,并与具有相似足迹和鞋底的两个类似的传统脚(刚性脚和柔性脚)进行了比较。实验验证的重点是分析站立性能,以等效支撑面延伸和补偿性踝关节角度来测量,以及对脉冲力的抑制,这对于踩到不可预见的障碍物等事件非常重要。 |
| Theory of Mind abilities of Large Language Models in Human-Robot Interaction : An Illusion? Authors Mudit Verma, Siddhant Bhambri, Subbarao Kambhampati 大型语言模型在各种自然语言和生成任务中表现出了卓越的生成能力。然而,可能的拟人化和对失败案例的宽容推动了对大语言模型新兴能力的讨论,特别是大语言模型中的心智理论 ToM 能力。虽然存在一些错误信念测试来验证推断和维护另一个实体的心智模型的能力,但我们研究了 ToM 能力的特殊应用,该应用具有更高的风险和可能不可逆转的后果人机交互。在这项工作中,我们探索了感知行为识别的任务,其中机器人采用大型语言模型法学硕士以类似于人类观察者的方式评估机器人生成的行为。我们关注四种行为类型,即可解释的、易读的、可预测的和模糊的行为,这些行为已被广泛用于合成可解释的机器人行为。因此,法学硕士的目标是成为代理的人类代理,并回答循环中的人类如何感知某种代理行为,例如,给定机器人的行为 X,人类观察者会发现它是可解释的。我们进行了一项人类主题研究,以验证用户是否能够在机器人设置和跨五个领域的规划场景中正确回答此类问题。对信念测试的首次分析产生了极其积极的结果,提高了人们对法学硕士拥有 ToM 能力的期望。然后,我们提出并执行一套打破这种幻想的扰动测试,即不一致的信念、无信息的背景和信念测试。 |
| Analysis and Perspectives on the ANA Avatar XPRIZE Competition Authors Kris Hauser, Eleanor Watson, Joonbum Bae, Josh Bankston, Sven Behnke, Bill Borgia, Manuel G. Catalano, Stefano Dafarra, Jan B.F. van Erp, Thomas Ferris, Jeremy Fishel, Guy Hoffman, Serena Ivaldi, Fumio Kanehiro, Abderrahmane Kheddar, Gaelle Lannuzel, Jacqueline Ford Morie, Patrick Naughton, Steve NGuyen, Paul Oh, Taskin Padir, Jim Pippine, Jaeheung Park, Daniele Pucci, Jean Vaz, Peter Whitney, Peggy Wu, David Locke ANA Avatar XPRIZE 是一项为期四年的竞赛,旨在开发机器人化身系统,使人类操作员能够在远程环境中感知、交流和行动,就好像物理存在一样。此次比赛有一个独特的要求,即评委在人机界面上接受不到一小时的训练后即可操作虚拟人物,并根据客观和主观评分指标对虚拟人物系统进行评判。本文从技术、评审、组织等角度对本次比赛进行了统一的总结和分析。我们研究远程机器人技术的使用以及参赛团队在其化身系统中追求的创新,并将这些技术的使用与法官的任务表现和主观调查评分相关联。 |
| CineMPC: A Fully Autonomous Drone Cinematography System Incorporating Zoom, Focus, Pose, and Scene Composition Authors Pablo Pueyo, Juan Dendarieta, Eduardo Montijano, Ana C. Murillo, Mac Schwager 我们推出了 CineMPC,这是一个完整的电影摄影系统,可以自主控制无人机拍摄多个目标,记录用户指定的审美目标。自主电影摄影中的现有解决方案仅控制摄像机的外部因素,即其位置和方向。相比之下,CineMPC 是第一个在控制环路中包含摄像机内部参数的解决方案,这些参数是控制焦距、景深和变焦等电影效果的重要工具。该系统根据 RGB D 图像估计目标和相机之间的相对位姿,并优化相机外部和内部参数的轨迹,以拍摄用户指定的艺术和技术要求。通过响应场景中的当前条件,在每个时间步重新优化轨迹,在非线性模型预测控制 MPC 循环中控制无人机和摄像机。 CineMPC的感知系统可以在不受摄像机影响的情况下跟踪目标的位置和方向。在真实平台上进行的逼真模拟实验证明了该系统能够实现一系列电影效果,而如果不控制相机的内部特性,这是不可能实现的。 |
| Modelling, Positioning, and Deep Reinforcement Learning Path Tracking Control of Scaled Robotic Vehicles: Design and Experimental Validation Authors Carmine Caponio, Pietro Stano, Raffaele Carli, Ignazio Olivieri, Daniele Ragone, Aldo Sorniotti, Umberto Montanaro 移动机器人系统正变得越来越流行。这些系统用于各种室内应用,从仓储和制造到用于评估先进控制策略的测试台,例如基于人工智能的控制解决方案,仅举几例。规模化机器人汽车通常配备分层控制结构,其中包括专用于车辆状态估计和控制的任务。本文涵盖了两个方面,提出了一种联邦扩展卡尔曼滤波器 FEKF ,以及一种新型深度强化学习 DRL 路径跟踪控制器,该控制器通过专家演示器进行训练,以加快学习阶段并提高模拟与现实差距的鲁棒性。本文还介绍了车辆模型的公式以及用于识别参数的有效而简单的程序。经过实验验证的模型用于支持 FEKF 的设计,并用作数字孪生模型来训练所提出的基于 DRL 的路径跟踪算法。实验结果证实了 FEKF 改进移动机器人位置估计的能力。此外,DRL 路径跟踪策略的有效性通过训练期间未考虑的操作进行了实验测试,这也显示了基于人工智能的解决方案优于基于模型的控制策略和演示器的能力。 |
| Multi S-Graphs: an Efficient Real-time Distributed Semantic-Relational Collaborative SLAM Authors Miguel Fernandez Cortizas, Hriday Bavle, David Perez Saura, Jose Luis Sanchez Lopez, Pascual Campoy, Holger Voos 协作同步定位和建图 CSLAM 对于使多个机器人在复杂环境中运行至关重要。大多数 CSLAM 技术依赖于原始传感器测量或关键帧描述符等低级特征,由于缺乏对环境的深入了解,这可能会导致错误的闭环。此外,机器人之间这些测量值和低级特征的交换需要传输大量数据,这限制了系统的可扩展性。为了克服这些限制,我们提出了 Multi S Graphs,这是一种去中心化的 CSLAM 系统,它利用嵌入在四层分层和可优化情境图中的高级语义关系信息来进行协作地图生成和定位,同时最大限度地减少机器人之间交换的信息。为了支持这一点,我们提出了一种新颖的基于房间的描述符,它与其连接的墙壁一起用于执行机器人间的闭环,解决多机器人绑架问题初始化的挑战。 |
| Discrete-Time Stress Matrix-Based Formation Control of General Linear Multi-Agent Systems Authors Okechi Onuoha, Suleiman Kurawa, Zezhi Tang, Yi Dong 本文考虑了具有静态和动态领导者的离散时间线性多智能体系统的基于分布式领导者跟随者应力矩阵的仿射形成控制问题。在领导跟随多智能体编队控制中,目标是驱动一组由领导者和跟随者组成的智能体形成任何所需的几何图案,并通过仅控制少数代表领导者的智能体同时执行任何所需的机动。现有的文献工作大多局限于代理间通信处于连续时间设置的情况,或者领导者被限制为恒定或零速度或加速度的采样数据情况。在这里,我们放宽这些约束并研究离散时间情况,其中领导者可以具有固定或随时间变化的速度。我们在研究不同情况时提出了控制律,并提供了一些充分的条件来保证整个系统的稳定性。 |
| BoundMPC: Cartesian Trajectory Planning with Error Bounds based on Model Predictive Control in the Joint Space Authors Thies Oelerich, Florian Beck, Christian Hartl Nesic, Andreas Kugi 这项工作提出了一种新颖的机器人操纵器在线模型预测轨迹规划器,称为 BoundMPC。该规划器允许在正交路径误差的所需非对称范围内,在末端执行器的位置和方向(包括过孔点)中无碰撞地遵循笛卡尔参考路径。路径参数同步位置和方向参考路径。将路径误差分解为切线方向(描述路径进度)和正交方向(表示与路径的偏差),这对于文献中路径跟随控制的位置而言是众所周知的。本文利用李旋转理论将这一思想扩展到方向。此外,正交误差平面进一步分解为基本方向,以轻松定义非对称笛卡尔误差界限。使用带有过点的分段线性位置和方向参考路径在计算上非常高效,并且允许在机器人运动期间重新规划位姿轨迹。此功能使得可以使用此规划器来动态变化的环境和变化的目标。 BoundMPC 的灵活性和性能通过 7 DoF Kuka LBR iiwa 14 R820 机器人上的两个场景进行了实验证明。第一个场景显示了一个较大的物体通过一个物体必须倾斜的有限空间从起始姿势转移到目标姿势。 |
| OkayPlan: Obstacle Kinematics Augmented Dynamic Real-time Path Planning via Particle Swarm Optimization Authors Jinghao Xin, Jinwoo Kim, Shengjia Chu, Ning Li 现有的全局路径规划 GPP 算法主要假定静态环境中的规划。这种假设极大地限制了它们在通常在动态环境中导航的无人驾驶水面车辆 USV 中的应用。为了解决这个限制,我们提出了OkayPlan,这是一种GPP算法,能够在桌面级计算机上以125 Hz的实时执行速度在动态场景中生成安全且短的路径。具体来说,我们通过将路径规划问题表述为障碍物运动学增强优化问题来应对动态避障的挑战,该问题可以通过基于 PSO 的优化器以实时速度有效解决。同时,建立了动态优先初始化DPI机制,自适应地初始化优化问题的潜在解,以进一步提高解的质量。此外,还设计了一种松弛策略,有助于在动态环境中自主调整 OKPlan 的超参数。已经进行了涉及规范和当代 GPP 算法的比较实验以及消融研究,以证实我们方法的有效性。结果表明,OkayPlan 在路径安全性、长度最优性和计算效率方面优于现有方法,使其成为动态环境中有效的 GPP 技术。 |
| Autonomous Navigation of Tractor-Trailer Vehicles through Roundabout Intersections Authors Daniel Attard, Josef Bajada 近年来,自动驾驶领域取得了重大进展,旨在提高安全性和效率。然而,针对牵引挂车的研究相对较少。由于物理特性和铰接接头,此类车辆需要定制模型。转弯时,拖车的后轮以较小的半径转动,卡车通常必须偏离车道中心才能适应这种情况。由于缺乏公开可用的模型,本工作使用高保真仿真软件 CARLA 开发卡车和拖车模型,并结合几个环岛场景,建立基准数据集。 |
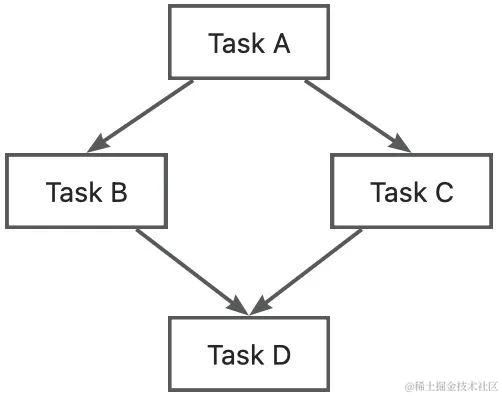
| A Universal Cooperative Decision-Making Framework for Connected Autonomous Vehicles with Generic Road Topologies Authors Zhenmin Huang, Shaojie Shen, Jun Ma 由于其固有的非线性、非凸性和离散特性,加上现实世界交通场景中遇到的多样化道路拓扑,联网自动驾驶汽车 CAV 的协作决策提出了长期的挑战。当前的大多数方法仅适用于基于场景特定假设的单一特定场景。因此,它们在现实环境中的应用受到无数交通场景的限制。在本研究中,我们提出了一种统一的优化方法,该方法具有解决与通用道路拓扑的交通场景相关的协作决策问题的潜力。这一发展的前提是各种流量场景的拓扑可以普遍表示为有向无环图 DAG。特别是,所有涉及的 CAV 的参考路径和时间曲线都是以完全协作的方式确定的,同时考虑了速度、加速度、冲突解决和整体交通效率等因素。 CAV 的协作决策被近似为基于道路拓扑 DAG 的混合整数线性规划 MILP 问题。这有利于标准数值求解器的使用,并且可以通过优化获得全局最优性。 |
| Why Change Your Controller When You Can Change Your Planner: Drag-Aware Trajectory Generation for Quadrotor Systems Authors Hanli Zhang, Anusha Srikanthan, Spencer Folk, Vijay Kumar, Nikolai Matni 由于越来越多地使用四旋翼飞行器进行有效载荷输送,我们考虑了四旋翼飞行器经历空气动力扳手的联合轨迹生成和反馈控制设计问题。来自所运载有效载荷的未建模的空气动力阻力可能会导致灾难性的后果。先前的工作将空气动力学效应建模为控制问题中的残余动力学或外部干扰,从而导致可能是灾难性的反应策略。此外,在硬件平台上重新设计控制器和调整控制增益是一项艰巨的工作。在本文中,我们认为,调整轨迹生成组件以保持控制器固定可以改善经历阻力的四旋翼飞行器系统的轨迹跟踪。为了实现这一目标,我们通过对最佳四旋翼控制问题应用适当的松弛来制定阻力感知规划问题,引入跟踪成本函数来衡量控制器遵循参考轨迹的能力。该跟踪成本函数充当轨迹生成中的正则化器,并从模拟获得的数据中学习。我们在仿真和 Crazyflie 硬件平台上进行的实验表明,更改规划器可将跟踪误差减少多达 83 。 |
| LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control Authors Saurav Agarwal, Ramya Muthukrishnan, Walker Gosrich, Alejandro Ribeiro, Vijay Kumar 覆盖控制是导航机器人群以协作监控先验未知的特征或感兴趣的现象的问题。在机器人通信和传感能力有限的分散环境中,这个问题具有挑战性。本文针对覆盖控制问题提出了一种可学习的感知动作通信 LPAC 架构。在所提出的解决方案中,卷积神经网络 CNN 处理环境的局部感知,图神经网络 GNN 实现相邻机器人之间相关信息的通信,最后,浅多层感知器 MLP 计算机器人动作。通信模块中的 GNN 通过计算与邻居通信哪些信息以及如何使用接收到的信息来采取适当的行动,从而实现机器人群中的协作。我们使用模仿学习和了解整个环境的集中式洞察算法来训练模型。评估表明,LPAC 模型的性能优于标准的分散式和集中式覆盖控制算法。学习到的策略可以推广到与训练数据集不同的环境,转移到机器人数量增加的更大环境,并且对噪声位置估计具有鲁棒性。 |
| Safe Low-Altitude Navigation in Steep Terrain with Fixed-Wing Aerial Vehicles Authors Jaeyoung Lim, Florian Achermann, Rik Girod, Nicholas Lawrance, Roland Siegwart 固定翼飞行器为长距离导航或覆盖大面积环境监测应用提供了一种有效的方法。根据设计,由于机动性有限,它们还需要较大的开放空间。然而,严格的监管和安全高度限制限制了可用空间。特别是在复杂、狭窄或陡峭的地形中,确保车辆不会进入不可避免的碰撞状态 ICS 可能具有挑战性。在这项工作中,我们提出了一种策略,以找到在严格的高度限制内导航时不进入 ICS 的安全路径。该方法使用周期性路径来有效地对 ICS 进行分类。基于采样的规划器创建无碰撞且运动学上可行的路径,该路径以安全的周期性圆形路径开始和结束。我们表明,在现实地形中,使用圆形周期性路径可以通过使其与偏航无关并限制偏航来简化目标选择过程。 |
| SOS-SLAM: Segmentation for Open-Set SLAM in Unstructured Environments Authors Jouko Kinnari, Annika Thomas, Parker Lusk, Kota Kondo, Jonathan P. How 我们提出了一种在非结构化环境中进行开放集同步定位和建图 SLAM 的新颖框架,该框架使用分段来创建对象地图以及对象之间的几何关系以进行定位。我们的系统包括 1 个前端映射管道,使用零镜头分割模型从图像中提取对象蒙版并跨帧跟踪它们以生成基于对象的地图,以及 2 个帧对齐管道,该管道使用对象的几何一致性来高效定位在各种条件下拍摄的地图。与传统的基于特征的 SLAM 系统或全局描述符方法相比,这种方法对光照和外观的变化更加鲁棒。这是通过在 Batvik 季节性数据集上评估 SOS SLAM 来建立的,该数据集包括在不同季节和照明条件下在芬兰南部沿海地区收集的无人机飞行数据。在不同环境条件下的飞行中,我们的方法比基准方法实现了更高的召回率,精度为 1.0。 SOS SLAM 在参考地图中的定位速度比其他基于特征的方法快 14 倍,并且地图大小小于最紧凑的其他地图大小的 0.4。当从不同的角度考虑本地化性能时,我们的方法优于同一角度的所有基准测试以及不同角度的大多数基准测试。 SOS SLAM 是非结构化环境中一种很有前途的 SLAM 新方法,它对光照和外观的变化具有鲁棒性,并且比其他方法的计算效率更高。 |
| Knowledge-aware Graph Transformer for Pedestrian Trajectory Prediction Authors Yu Liu, Yuexin Zhang, Kunming Li, Yongliang Qiao, Stewart Worrall, You Fu Li, He Kong 预测行人运动轨迹对于自动驾驶车辆的路径规划和运动控制至关重要。由于不同环境中人体运动的不确定性,准确预测人群轨迹具有挑战性。对于训练,最近基于深度学习的预测方法主要利用轨迹历史和行人之间的交互等信息。由于训练数据集之间的差异尚未正确纳入,这可能会限制各种场景的预测性能。为了克服这一限制,本文提出了一种图转换器结构来提高预测性能,捕获数据集中包含的各个站点和场景之间的差异。特别是,设计了自注意力机制和领域适应模块来提高模型的泛化能力。此外,出于训练和性能评估目的,引入了考虑跨数据集序列的附加度量。使用流行的公共数据集(即 ETH 和 UCY)对所提出的框架进行了验证并与现有方法进行了比较。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com
![[BUUCTF]-PWN:babyfengshui_33c3_2016解析](https://img-blog.csdnimg.cn/direct/076b7e2d2f5c4970874c245f22ae8d34.png)