简明版本
最近感悟就是在“常规赛”中,大部分奇技淫巧远不如官方教程。
我使用大模型工具快一年的时间所积累的经验远不如认真看看官方教程。
官方教程

里面有一点就可以秒99%的工具人,“文心一言7*24小时在线,伴你左右。 ”
结合文心一言的四大基础能力——理解、生成、逻辑、记忆,学习ROS2机器人开发可以更加高效。以下是一些建议:
- 理解能力:利用文心一言的理解能力,你可以更深入地理解ROS2的复杂概念和术语。当你遇到难以理解的部分时,尝试用你自己的话描述问题或疑惑,文心一言或许能以更通俗易懂的方式给出解释。
- 生成能力:ROS2开发涉及到大量的代码和配置文件。你可以借助文心一言的生成能力,快速生成模板代码、配置文件甚至是完整的项目框架,这将大大节省你的时间。
- 逻辑能力:在ROS2开发中,经常需要解决各种逻辑问题,如节点间的通信、状态管理等。文心一言的逻辑能力可以帮助你理清思路,找到问题的解决方案。此外,它还可以帮助你进行数学计算,这在机器人运动学、动力学等方面非常有用。
- 记忆能力:学习ROS2时,需要记住大量的命令、参数和配置方法。文心一言的记忆能力可以作为一个强大的辅助工具,帮你在需要时快速找到相关信息。你可以将重要的知识点、命令或代码片段保存在文心一言中,以便随时查阅。
此外,你还可以尝试以下方法来提高学习效率:
- 主动学习:明确你的学习目标,然后主动寻找相关的学习资源和问题。文心一言可以作为一个强大的搜索引擎,帮你找到你需要的资料。
- 实践操作:理论学习固然重要,但实践操作更是关键。尝试用ROS2搭建一个简单的机器人项目,通过实际操作来加深理解。
- 参与社区:ROS2有一个活跃的社区,你可以在其中提问、分享经验和学习他人的知识。文心一言也可以帮你找到相关的社区和资源。
总之,结合文心一言的四大基础能力,你可以更高效地学习ROS2机器人开发。不断实践、探索和分享,你将逐渐掌握这门技术并享受其中的乐趣。
户外机器人区域覆盖算法仿真测试平台设计与实现(预告)-CSDN博客
室内机器人区域覆盖算法仿真测试平台设计与实现(预告)-CSDN博客
按其官方教程,提问方式没有经过正规化训练还是明显欠缺的。
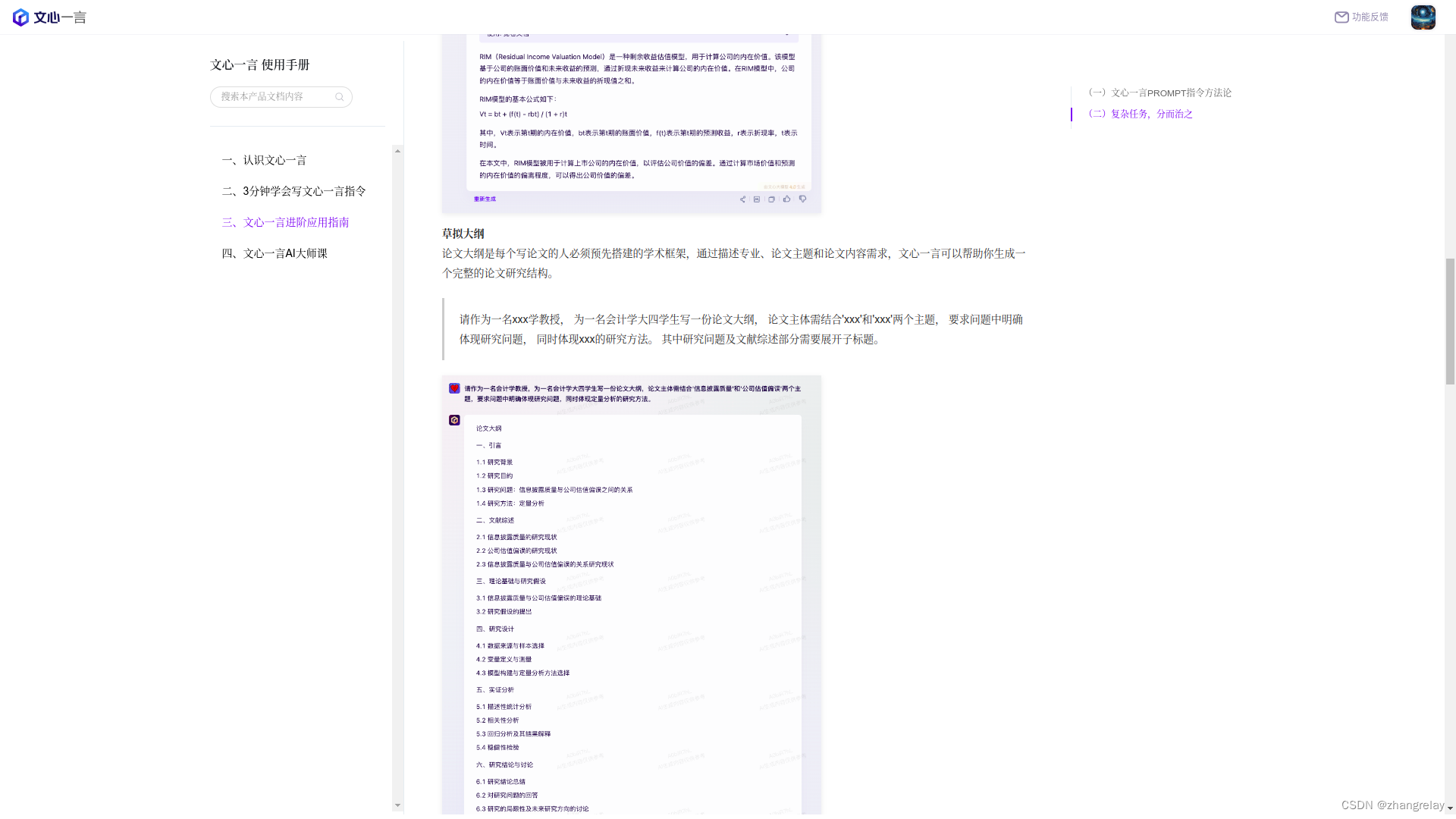
给出示例:
请根据已发表的关于室内机器人区域覆盖算法仿真测试平台设计与实现的相关文献,撰写一篇系统梳理室内机器人区域覆盖算法仿真测试平台设计与实现可行性相关研究要点以及未来挑战的综述论文,并且严格遵循《自动化学报》投稿格式。
需要包含:要求+参考消息+动作+目标,每个提示词越具体详细,效果通常而言越好。
室内机器人区域覆盖算法仿真测试平台设计与实现:研究综述与未来挑战
摘要:
随着机器人技术的飞速发展,室内机器人的区域覆盖算法成为了研究的热点。为了有效评估和优化这些算法,仿真测试平台的设计与实现显得尤为重要。本文系统梳理了近年来关于室内机器人区域覆盖算法仿真测试平台的相关研究,重点分析了其设计原理、实现方法、应用效果及存在的挑战,旨在为相关领域的研究者提供有益的参考。
关键词: 室内机器人;区域覆盖算法;仿真测试平台;设计与实现;研究挑战
1. 引言
室内机器人在智能家居、服务机器人等领域具有广泛的应用前景。区域覆盖算法作为室内机器人的核心技术之一,其性能直接影响到机器人的工作效率和覆盖效果。因此,构建一个高效、可靠的仿真测试平台,对于算法的研发和优化具有重要意义。
2. 室内机器人区域覆盖算法仿真测试平台设计
仿真测试平台的设计需考虑多方面因素,包括场景的构建、机器人的模型、传感器的模拟、算法的集成等。本节将从这些方面对已有研究进行梳理。
2.1 场景构建
场景构建是仿真测试平台的基础,需要真实反映室内环境的特点。研究者通常利用三维建模软件创建虚拟场景,包括房间布局、障碍物设置等。一些先进的平台还支持场景的动态变化,以模拟真实世界中的不确定性。
2.2 机器人模型
机器人模型是仿真测试平台的核心。研究者根据实际需求,选择或构建适合的机器人模型,包括其物理特性、运动学模型、传感器配置等。这些模型需要与真实机器人尽可能一致,以确保仿真结果的有效性。
2.3 传感器模拟
传感器是机器人感知外界的重要工具。仿真测试平台需要模拟各种传感器的工作原理和数据输出,如激光雷达、摄像头等。通过这些模拟传感器,机器人可以在虚拟环境中感知并作出相应的决策。
2.4 算法集成
仿真测试平台需要提供友好的接口,方便研究者集成各种区域覆盖算法。这样,研究者可以在同一平台上对不同算法进行性能比较和优化。
3. 室内机器人区域覆盖算法仿真测试平台实现
实现仿真测试平台需要将上述设计转化为具体的软件或硬件系统。本节将介绍几种典型的实现方法。
3.1 基于软件仿真的实现
这种方法主要利用计算机软件进行仿真。研究者可以选择现有的仿真软件,如ROS、Gazebo等,也可以自行开发仿真系统。软件仿真的优点是成本低、灵活性高,但可能受到计算性能的限制。
3.2 基于硬件在环仿真的实现
硬件在环仿真结合了软件和硬件的优势。研究者通过将真实机器人与虚拟环境相连接,实现在虚拟环境中的实时测试和验证。这种方法可以提高仿真的真实性,但成本较高。
4. 应用效果与挑战
仿真测试平台在室内机器人区域覆盖算法的研发中发挥了重要作用。然而,仍存在一些挑战需要解决。
4.1 应用效果
通过仿真测试平台,研究者可以快速评估和优化区域覆盖算法。一些平台还支持多机器人协同仿真,为复杂任务的研究提供了便利。
4.2 挑战与展望
(1) 仿真真实性问题:如何提高仿真的真实性,使仿真结果更接近实际应用场景,是一个需要解决的问题。
(2) 计算性能问题:随着场景复杂性和机器人数量的增加,仿真对计算性能的要求也越来越高。
(3) 平台通用性问题:目前尚无统一的仿真测试平台标准,不同平台之间的互操作性和数据共享性有待提高。
5. 结论
本文对室内机器人区域覆盖算法仿真测试平台的设计与实现进行了系统梳理。通过分析现有研究的应用效果和面临的挑战,展望了未来研究方向。随着技术的不断进步,相信仿真测试平台将在室内机器人领域发挥越来越重要的作用。

论文神器!!!
比教师专业并且24小时在线。
只要愿意学并主动实践,的确就能借助这样的工具快速成长。
但还是无法解决一个已经空心或者迷茫的人如何找到方向和目标的问题。
代码研究
更好的学习代码,并非使用:
文心一言使用分享-CSDN博客
而是:
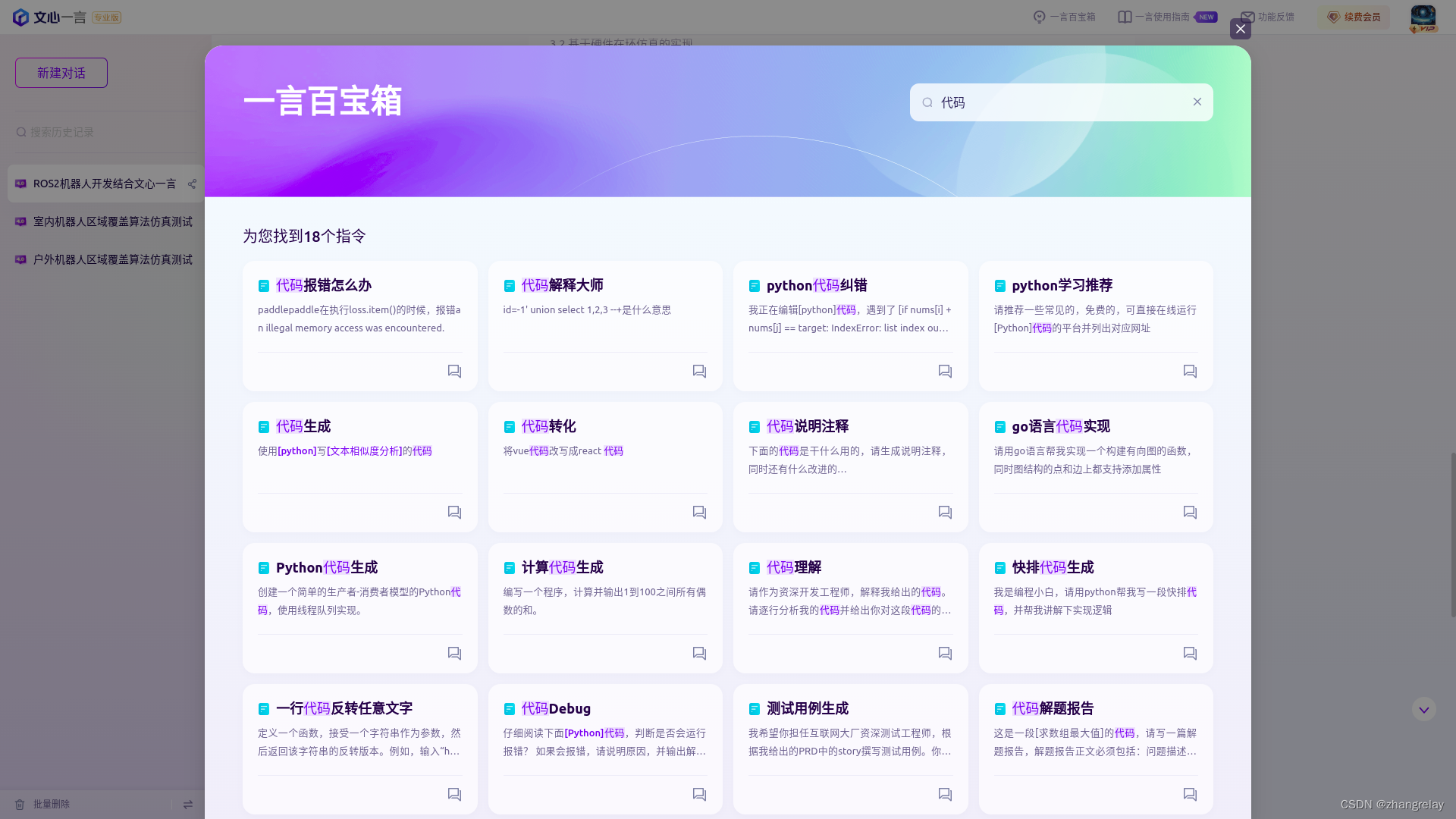
使用百宝箱中的专业插件。
效果会明显提升,并且正确率超过99%的本科水平专业人员。
这段代码是一个C语言程序,它使用ASCII字符在控制台上绘制一个动画效果。我们可以尝试将其转换为Python 2代码,但请注意,Python 2已在2020年停止维护,因此建议使用Python 3。不过,如果你确实需要Python 2版本,我可以为你提供一个。
以下是这段C代码的Python 2版本:
import math
import time
import sys
def main():
A = 0.0
B = 0.0
z = [0.0] * 1760
b = [' '] * 1760
while True:
for j in range(0, int(6.28 * 10), 2):
j /= 10.0
for i in range(0, int(6.28 * 5), 1):
i /= 10.0
c = math.sin(i)
d = math.cos(j)
e = math.sin(A)
f = math.sin(j)
g = math.cos(A)
h = d + 2
D = 1.0 / (c * h * e + f * g + 5)
l = math.cos(i)
m = math.cos(B)
n = math.sin(B)
t = c * h * g - f * e
x = 40 + 30 * D * (l * h * m - t * n)
y = 12 + 15 * D * (l * h * n + t * m)
o = int(x + 80 * y)
N = int(8 * ((f * e - c * d * g) * m - c * d * e - f * g - l * d * n))
if 0 < y < 22 and 0 < x < 80 and D > z[o]:
z[o] = D
b[o] = ".,-~:;=!*#$@"[N if N > 0 else 0]
sys.stdout.write('\x1b[H')
for k in range(1760):
sys.stdout.write(b[k] if k % 80 else '\n')
A += 0.00004
B += 0.00002
sys.stdout.flush()
time.sleep(0.03)
if __name__ == '__main__':
main()注意:
- 我已经尽量使Python代码与C代码保持一致,但Python和C在语法和库函数方面存在许多差异,因此不可能做到100%的精确转换。
- 在Python中,我们使用
range()函数来模拟C语言中的for循环。- 使用
sys.stdout.write()和sys.stdout.flush()来模拟C语言中的putchar()和立即刷新输出。- 使用
time.sleep()代替usleep()来暂停程序。注意,time.sleep()的参数是秒,而usleep()的参数是微秒,所以我对参数进行了相应的调整。- Python 2中的除法与C语言中的除法有所不同,因此我使用了
/=操作符来确保得到浮点数结果。但在Python 3中,这不再是问题,因为Python 3中的/操作符默认执行浮点数除法。- Python中的列表索引从0开始,因此在使用列表时需要注意边界条件。
- 字符串在Python中是可变的,但在C语言中是不可变的。因此,我使用了一个字符列表来模拟C语言中的字符数组,并可以直接修改其元素。
- 你可以通过在终端中运行此Python脚本来查看动画效果。如果你的终端不支持ASCII艺术或颜色代码,可能无法正确显示动画效果。
如果是python3也是一次成功的。
当然可以。以下是这段C代码转换为Python 3的版本。在这个版本中,我使用numpy来处理数组以提高性能,并使用time.sleep来替代usleep。此外,Python的math.cos和math.sin函数被用于计算三角函数值。
请注意,Python中的浮点数除法与C语言中的行为不同,因此无需担心整数除法的问题。另外,Python使用动态类型,所以不需要预先声明变量的类型。
import math
import numpy as np
import time
import sys
def main():
A = 0.0
B = 0.0
z = np.zeros(1760)
b = np.array([' '] * 1760, dtype='<U1') # Unicode character array
while True:
b.fill(' ') # Fill the array with spaces
z.fill(0) # Fill z with zeros
for j in np.arange(0, 6.28, 0.07):
for i in np.arange(0, 6.28, 0.02):
c = math.sin(i)
d = math.cos(j)
e = math.sin(A)
f = math.sin(j)
g = math.cos(A)
h = d + 2
D = 1.0 / (c * h * e + f * g + 5)
l = math.cos(i)
m = math.cos(B)
n = math.sin(B)
t = c * h * g - f * e
x = int(40 + 30 * D * (l * h * m - t * n))
y = int(12 + 15 * D * (l * h * n + t * m))
o = x + 80 * y
N = int(8 * ((f * e - c * d * g) * m - c * d * e - f * g - l * d * n))
if 0 < y < 22 and 0 < x < 80 and D > z[o]:
z[o] = D
b[o] = ".,-~:;=!*#$@"[N] if N > 0 else '.'
sys.stdout.write('\x1b[H')
for k in range(1760):
sys.stdout.write(b[k] if k % 80 else '\n')
A += 0.00004
B += 0.00002
sys.stdout.flush()
time.sleep(0.03)
if __name__ == '__main__':
main()
在这个Python版本中,我做了以下更改:
- 使用
numpy库的arange函数替代C语言中的for循环的增量,以便更简洁地生成所需的数值序列。 - 使用
numpy数组来存储z和b,并使用fill方法来初始化数组的内容。 - 将字符数组
b的类型设置为<U1,这表示每个元素都是一个长度为1的Unicode字符串。这是因为在Python 3中,字符串是Unicode的,并且数组需要知道每个字符串的大小。 - 在将字符写入控制台之前,使用
sys.stdout.write而不是putchar,并使用sys.stdout.flush来确保输出被立即刷新到控制台。 - 使用
time.sleep代替usleep,并调整延迟参数以匹配所需的等待时间(以秒为单位)。 - 删除了不必要的头文件包含,并导入了所需的Python模块。
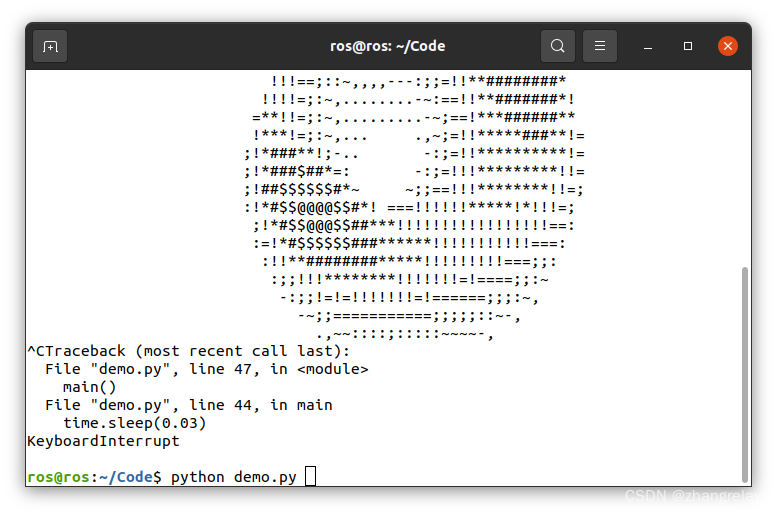
运行此Python脚本将在控制台上生成与原始C代码类似的动画效果。
不报错,并且完美一次ok!


为了将动画效果的范围扩大一倍,我们需要调整几个关键的参数。这些参数主要影响图形的尺寸和位置。以下是修改后的代码:
import math
import numpy as np
import time
import sys
def main():
A = 0.0
B = 0.0
z = np.zeros(7040) # 扩大数组大小以容纳更大的显示区域
b = np.array([' '] * 7040, dtype='<U1') # 扩大字符数组大小
while True:
b.fill(' ') # 用空格填充数组
z.fill(0) # 用0填充z数组
for j in np.arange(0, 6.28, 0.07):
for i in np.arange(0, 6.28, 0.02):
c = math.sin(i)
d = math.cos(j)
e = math.sin(A)
f = math.sin(j)
g = math.cos(A)
h = d + 2
D = 1.0 / (c * h * e + f * g + 5)
l = math.cos(i)
m = math.cos(B)
n = math.sin(B)
t = c * h * g - f * e
x = int(40 + 60 * D * (l * h * m - t * n)) # 调整x的计算中的系数以扩大宽度
y = int(12 + 30 * D * (l * h * n + t * m)) # 调整y的计算中的系数以扩大高度
o = x + 160 * y # 调整索引计算以适应更宽的行
N = int(8 * ((f * e - c * d * g) * m - c * d * e - f * g - l * d * n))
if 0 < y < 44 and 0 < x < 160 and D > z[o]: # 调整边界条件以匹配新的尺寸
z[o] = D
b[o] = ".,-~:;=!*#$@"[N] if N > 0 else '.'
sys.stdout.write('\x1b[H')
for k in range(7040):
sys.stdout.write(b[k] if k % 160 else '\n') # 调整换行条件以适应更宽的行
A += 0.00004
B += 0.00002
sys.stdout.flush()
time.sleep(0.03)
if __name__ == '__main__':
main()
在这个修改中,我做了以下调整:
- 将
z和b数组的大小从1760扩大到7040,以容纳更多的字符。 - 调整了
x和y的计算公式中的系数,以扩大图形的宽度和高度。 - 更新了边界条件,以确保字符在正确的范围内绘制。
- 更改了换行条件,以反映每行现在应该有160个字符而不是80个字符。
这些更改应该会导致动画效果的范围扩大一倍。注意,这个代码可能需要在一个支持ASCII字符动画的环境中运行,例如在某些终端或命令行界面中。
对比如下:


掌握这一类方式方法,ROS1代码直接借助此类工具转为ROS2代码,Python代码直接转为C++代码测试效果都非常好,一定要用最合适的方式学习和研究代码。