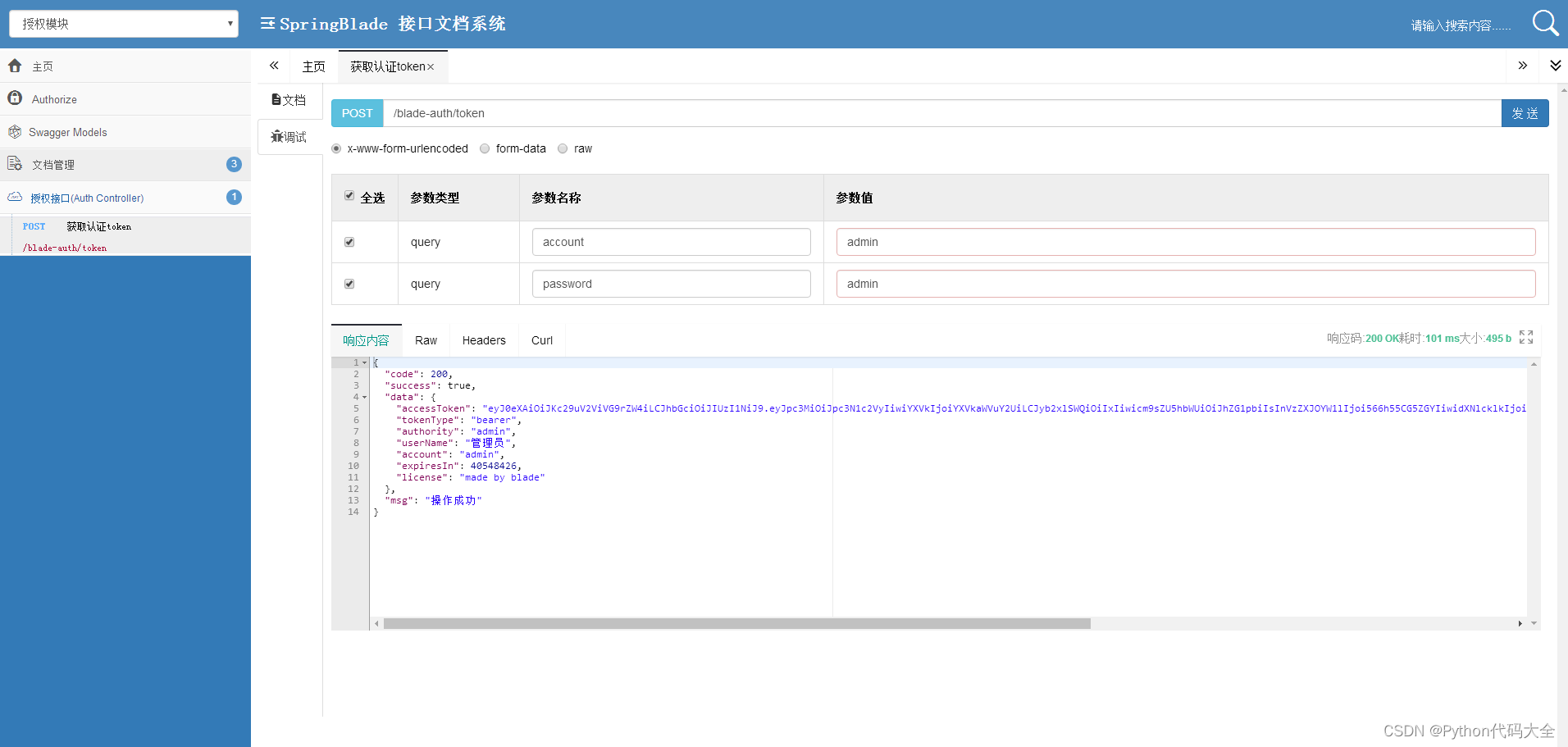
指针仪表读数识别系统通过 yolov7+opencv计算机视觉分析技术,利用现场摄像头可以自动识别指针型仪表读数并将读数回传给平台节省人工巡检读表的时间。YOLOv7 在 5 FPS 到 160 FPS 范围内,速度和精度都超过了所有已知的目标检测器,并在V100 上,30 FPS 的情况下达到实时目标检测器的最高精度 56.8% AP。YOLOv7 是在 MS COCO 数据集上从头开始训练的,不使用任何其他数据集或预训练权重。
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉处理开源软件库,支持与计算机视觉和机器学习相关的众多算法,以BSD许可证授权发行。OpenCV可用于开发实时的图像处理、计算机视觉以及模式识别程序,该程序库也可以使用英特尔公司的IPP进行加速处理。
相对于其他类型的工具,YOLOv7-E6 目标检测器(56 FPS V100,55.9% AP)比基于 transformer 的检测器 SWINL Cascade-Mask R-CNN(9.2 FPS A100,53.9% AP)速度上高出 509%,精度高出 2%,比基于卷积的检测器 ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) 速度高出 551%,精度高出 0.7%。
Adapter接口定义了如下方法:
public abstract void registerDataSetObserver (DataSetObserver observer)
Adapter表示一个数据源,这个数据源是有可能发生变化的,比如增加了数据、删除了数据、修改了数据,当数据发生变化的时候,它要通知相应的AdapterView做出相应的改变。为了实现这个功能,Adapter使用了观察者模式,Adapter本身相当于被观察的对象,AdapterView相当于观察者,通过调用registerDataSetObserver方法,给Adapter注册观察者。
public abstract void unregisterDataSetObserver (DataSetObserver observer)
通过调用unregisterDataSetObserver方法,反注册观察者。
public abstract int getCount () 返回Adapter中数据的数量。
public abstract Object getItem (int position)
Adapter中的数据类似于数组,里面每一项就是对应一条数据,每条数据都有一个索引位置,即position,根据position可以获取Adapter中对应的数据项。
public abstract long getItemId (int position)
获取指定position数据项的id,通常情况下会将position作为id。在Adapter中,相对来说,position使用比id使用频率更高。
public abstract boolean hasStableIds ()
hasStableIds表示当数据源发生了变化的时候,原有数据项的id会不会发生变化,如果返回true表示Id不变,返回false表示可能会变化。Android所提供的Adapter的子类(包括直接子类和间接子类)的hasStableIds方法都返回false。
public abstract View getView (int position, View convertView, ViewGroup parent)
getView是Adapter中一个很重要的方法,该方法会根据数据项的索引为AdapterView创建对应的UI项。