视频教程:https://www.bilibili.com/video/BV12s411g7gU?p=155
向量
一个数字列表,表示各个维度上的有向位移;同时也是一个有大小有方向的物理量,大小及向量的模长,而方向即空间中向量的指向,可以表示物体的位置和方向
向量的形式
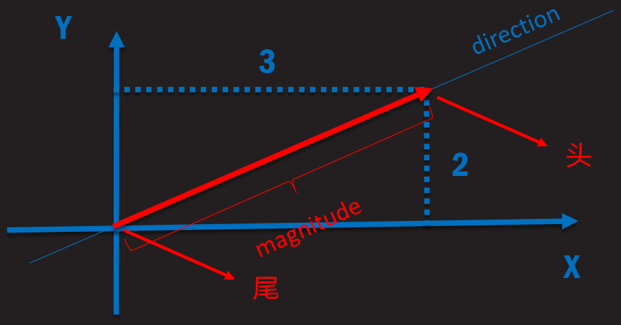
向量的大小(模)
向量各分量平方和的平方根

API :
Vector3.magnitude:模长
Vector3..sqrMagnitude:模长的平方
向量的方向
获取向量方向也称“标准化向量”,或“归一化向量”,即该向量的单位向量(大小为1的向量)。
几何意义︰将该向量拉长或者缩短,使模长等于1
![]()
API:
Vector3.normalized:获取该向量的单位向量
Vector3 vector2=vector1.normalized;//vector2为vector1的单位向量Vector3.Normalize:将该向量自身设置为单位向量
vector1.Normalize();//将vector1自身设置为单位向量private void Update()
{
Demo01();
Demo02();
}
//模长
private void Demo01()
{
Vector3 pos = this.transform.position;
float m01 = Mathf.Sqrt(Mathf.Pow(pos.x, 2) + Mathf.Pow(pos.y, 2) + Mathf.Pow(pos.z, 2));
float m02 = pos.sqrMagnitude;
float m03 = Vector3.Distance(Vector3.zero, pos);
Debug.LogFormat("{0}--{1}--{2}", m01, m02, m03);
Debug.DrawLine(Vector3.zero, pos);
}
//方向
private void Demo02()
{
Vector3 pos = this.transform.position;
Vector3 n01 = pos / pos.magnitude;
Vector3 n02 = pos.normalized;
Debug.DrawLine(Vector3.zero, n02, Color.red);
}
向量的运算
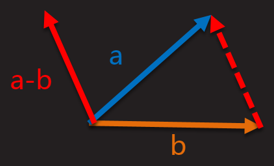
向量相减:等于各分量相加减,应用于计算两点间的距离和相对方向
![]()
几何意义:向量a与向量b相减,结果理解为以b的终点为始点,以a的终点为终点的向量。方向由b指向a
向量相加:等于各分量相加和,应用于物体移动
![]()
几何意义:向量a与向量b相加,平移使b的始点与a的终点重合,结果为以a的始点为始点,以b的终点为终点的向量
向量与标量的乘除
乘法:该向量的各分量与标量相乘;k[xy,z]= [xk,yk,zk]
除法:该向量的各分量与标量相除;[x,y,z]/k = [x/k,y/k,z/k]
几何意义:缩放向量长度
public Transform t1, t2, t3;
private void Update()
{
Demo03();
}
//向量运算
private void Demo03()
{
//t1相对于t2的位置
//其大小为两点间距离
Vector3 relativeDirection = t1.position - t2.position;
//t3沿relativeDirection方向移动
if (Input.GetKeyDown(KeyCode.A))
//获取方向向量,避免两物体间距离对速度造成影响
//t3.Translate(relativeDirection.normalized * 0.5f);
t3.position+=relativeDirection.normalized;
Debug.DrawLine(Vector3.zero, relativeDirection);
}
三角函数
角的度量方式
PI=180度 1弧度=180度/PI 1角度=PI/180度
角度-->弧度:弧度=角度数*PI/180
API:弧度=角度数*Mathf.Deg2Rad
弧度-->角度:角度=弧度数*180/PI
API:角度=弧度数*Mathf.Rad2Deg
private void Demo01()
{
//角度-->弧度:弧度=角度数*PI/180
float d1 = 60;
float r1 = d1 * Mathf.PI / 180;
float r2 = d1 * Mathf.Deg2Rad;
print("角度-->弧度:" + d1 + "-->" + r1 + "/" + r2);
}
private void Demo02()
{
//弧度-->角度:角度=弧度数*180/PI
float r1 = 3;
float d1 = r1 * 180 / Mathf.PI;
float d2 = r1 * Mathf.Rad2Deg;
print("弧度-->角度:" + r1 + "-->" + d1 + "/" + d2);
}三角函数
建立了直角三角形中角与边长比值的关系
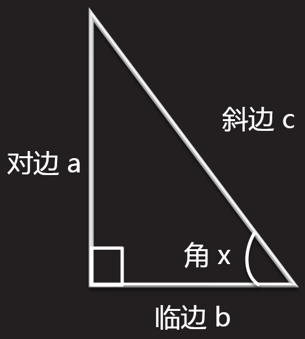
正弦:sin x = a / c
余弦:cos x = b / c
正切:tan x = a / b
API(以弧度为单位):
正弦:Mathf.Sin
余弦:Mathf.Cos
正切:Mathf.Tan
反三角函数
反正弦,反余弦,反正切等函数的总称;可用于根据两边长,计算角度
反正弦:arcsin a / c = x
反余弦:arccos b / c = x
反正切:arctan a / b = x;
API(以弧度为单位):
反正弦:Mathf.Asin
反余弦:Mathf.Acos
反正切:Mathf.Atan
private void Demo03()
{
//已知角度x,边长b,求边长a
float x = 50, b = 20;
float a = Mathf.Tan(x * Mathf.Deg2Rad);
//已知边长a,边长b,求角度angle
float angle = Mathf.Atan(a / b) * Mathf.Rad2Deg;
print(angle);
}
private void Demo04()
{
//将自身坐标系转换到世界坐标系中
//Vector3 worldPos = transform.TransformPoint(0, 0, 10);
//计算物体前方30度,10m远的坐标
float x = Mathf.Sin(30 * Mathf.Deg2Rad) * 10;
float z = Mathf.Cos(30 * Mathf.Deg2Rad) * 10;
Vector3 worldPos = transform.TransformPoint(x, 0, z);
print(worldPos);
}Transform.TransformPoint(Vector3 position):将position从本地空间变换到世界空间







![[数据结构基础]栈和队列的结构及接口函数](https://img-blog.csdnimg.cn/1891b6b26f8d4cbc850b93c7d6c6a697.png)