文章目录
- 上一篇
- 无约束问题的极值条件
- 约束极值问题的最优性条件
- 基本概念
- 只有不等式约束时
- 下一篇
上一篇
最优化理论复习–对偶单纯形方法及灵敏度分析
无约束问题的极值条件
由于是拓展到向量空间 R n R^n Rn, 所以可由高数中的极值条件进行类比
-
一阶必要条件
设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处可微, 若 x ˉ \bar{x} xˉ 是局部极小点,则 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0
类比于若 x ˉ \bar{x} xˉ 是极小值点则 f ′ ( x ˉ ) = 0 f'(\bar{x}) = 0 f′(xˉ)=0 -
二阶必要条件
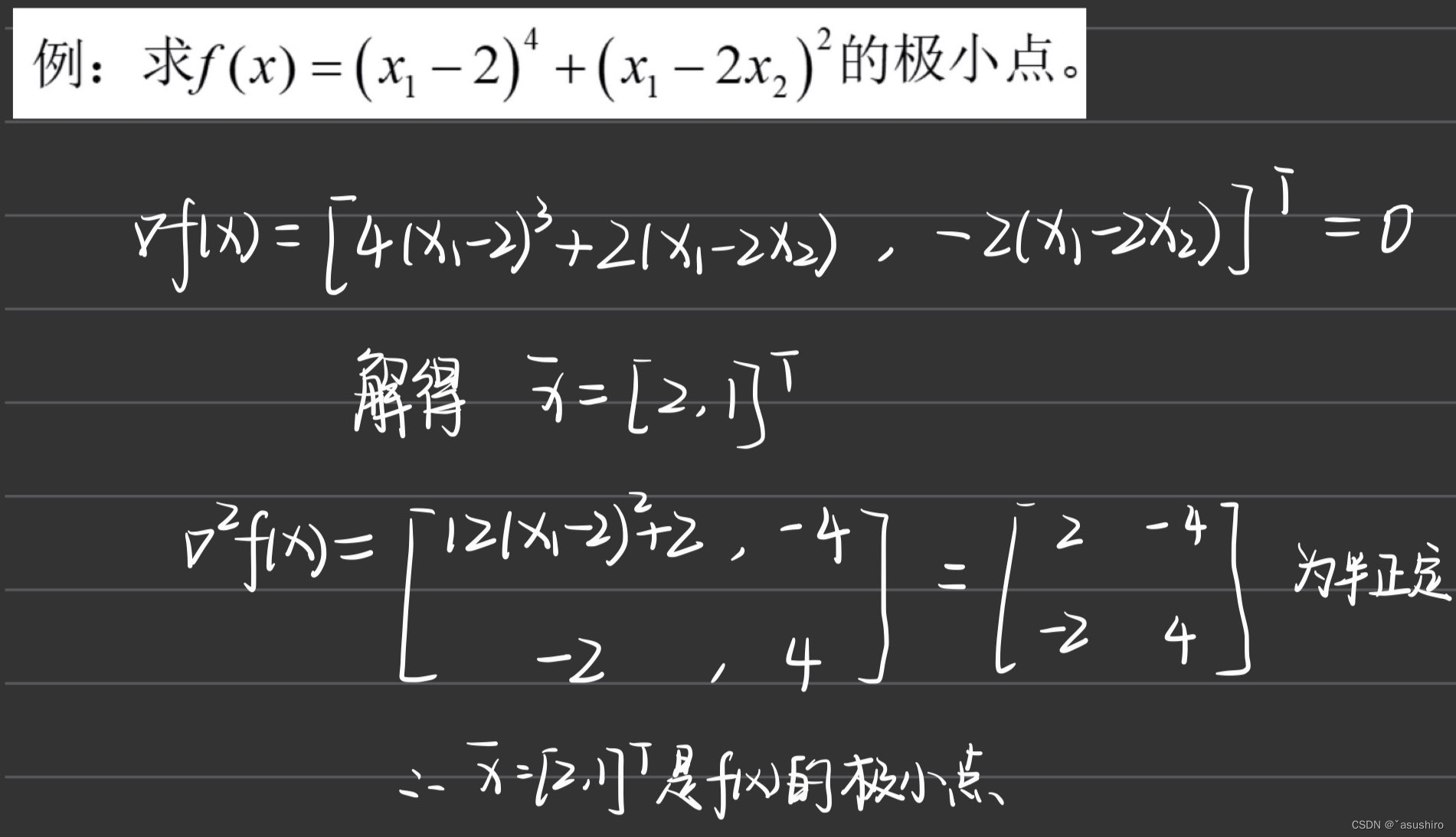
设 f ( x ) f(x) f(x) 在 x ˉ \bar{x} xˉ 处二阶可微,若 x ˉ \bar{x} xˉ 是局部极小点, 则 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0, 且 H e s s i a n Hessian Hessian 矩阵 ▽ 2 f ( x ˉ ) \bigtriangledown^2f(\bar{x}) ▽2f(xˉ) 是半正定的。
类比于 若 x ˉ \bar{x} xˉ是极小值点则 f ′ ( x ˉ ) = 0 , 且 f ′ ′ ( x ˉ ) ≥ 0 f'(\bar{x}) = 0, 且 f''(\bar{x}) \geq 0 f′(xˉ)=0,且f′′(xˉ)≥0 -
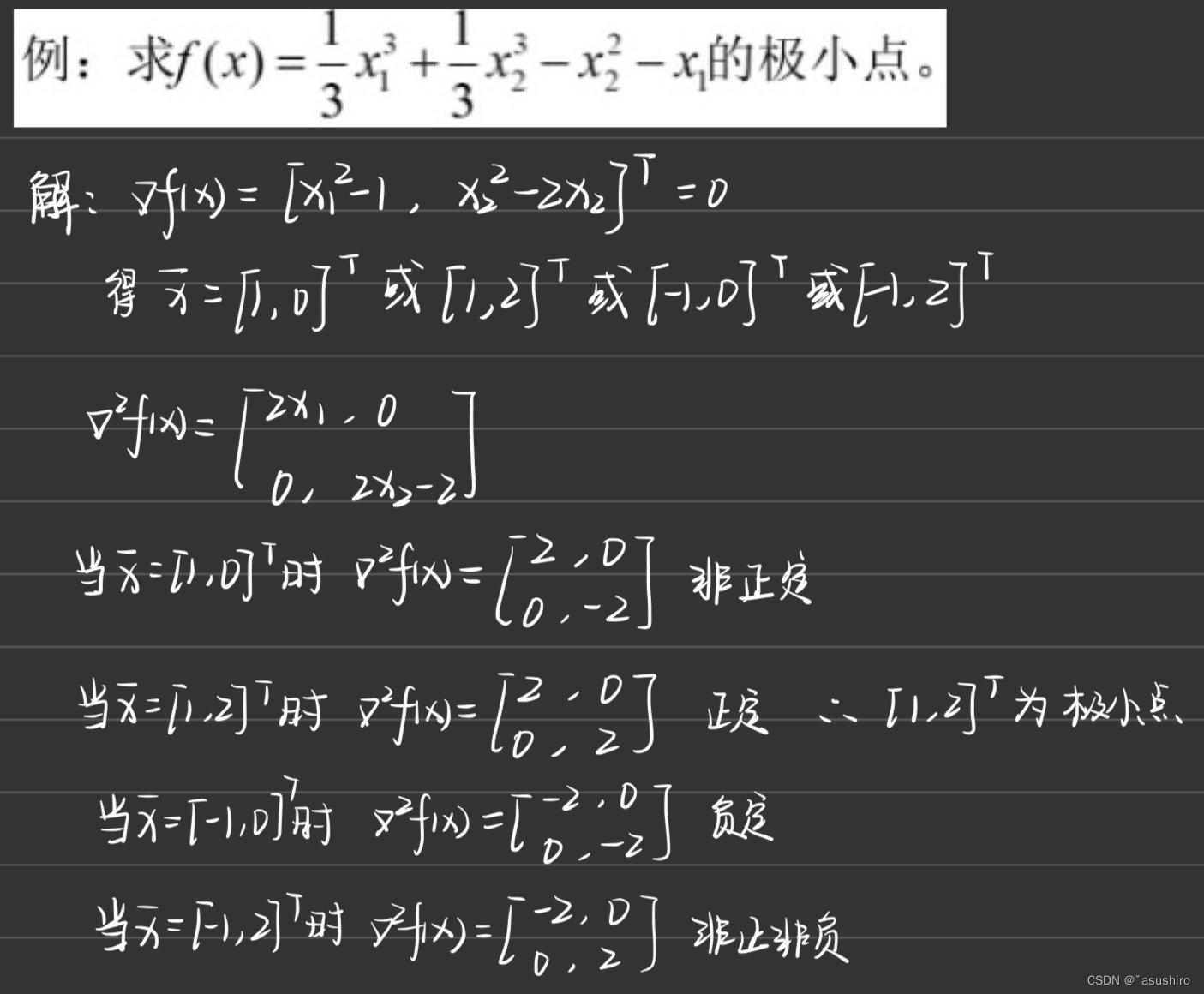
二阶充分条件
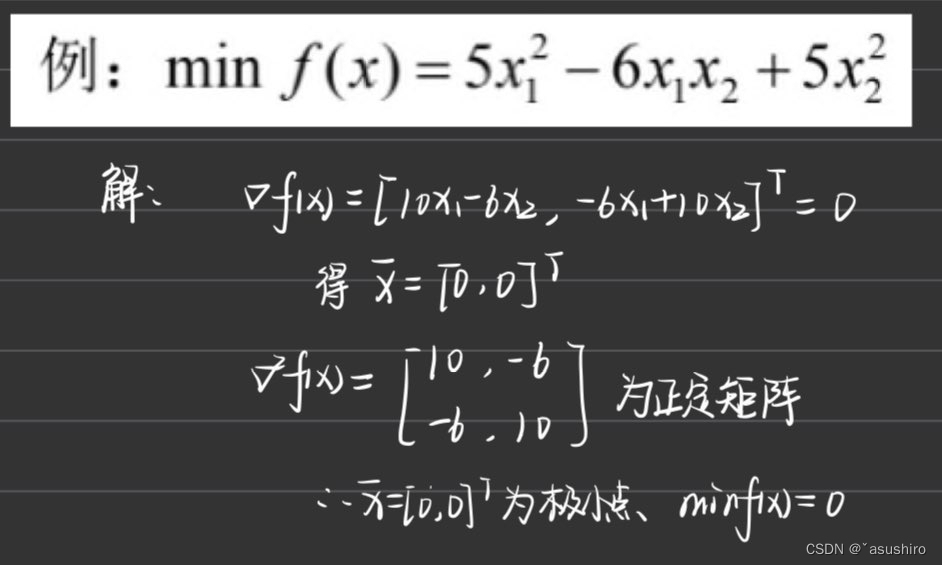
设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处二次可微,若梯度 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0, 且 H e s s i a n Hessian Hessian 矩阵 ▽ 2 f ( x ˉ ) 正 定 \bigtriangledown^2f(\bar{x})正定 ▽2f(xˉ)正定, 则 x ˉ \bar{x} xˉ是严格局部极小点。
类比于 f ′ ( x ˉ ) = 0 , f ′ ′ ( x ˉ ) > 0 f'(\bar{x}) = 0, f''(\bar{x}) > 0 f′(xˉ)=0,f′′(xˉ)>0则 x ˉ \bar{x} xˉ 是极小值点 -
充要条件
设 f ( x ) f(x) f(x) 是定义在 R n R^n Rn 上的可微凸函数, x ˉ ∈ R n \bar{x} \in R^n xˉ∈Rn, 则 x ˉ \bar{x} xˉ 为整体极小点的充要条件是 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0
注:如果 f ( x ) f(x) f(x) 是严格凸的,则全局极小点是唯一的。
约束极值问题的最优性条件
基本概念
定义: 对 m i n f ( x ) min f(x) minf(x), 设 x ˉ ∈ R n \bar{x} \in R^n xˉ∈Rn 是任给一点, d ≠ 0 d \not = 0 d=0, 若存在 δ > 0 \delta > 0 δ>0, 使得对任意的 λ ∈ ( 0 , δ ) \lambda \in (0, \delta) λ∈(0,δ), 有 f ( x ˉ + λ d ) < f ( x ˉ ) f (\bar{x} + \lambda d) < f(\bar{x}) f(xˉ+λd)<f(xˉ), 则称 d d d 为 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处的下降方向。
-
引理: 设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 可微, 若存在 d ≠ 0 d \not = 0 d=0, 使得 ▽ f ( x ˉ ) T d < 0 \bigtriangledown f(\bar{x})^T d < 0 ▽f(xˉ)Td<0, 则存在 δ > 0 \delta > 0 δ>0, 是使得对 ∀ λ ∈ ( 0 , δ ) \forall \lambda \in (0, \delta) ∀λ∈(0,δ), 有 f ( x ˉ + λ d ) < f ( x ˉ ) f(\bar{x} + \lambda d)<f(\bar{x}) f(xˉ+λd)<f(xˉ)。
即与梯度方向成钝角的方向是下降方向
表示为
F 0 = { d ∣ ▽ f ( x ˉ ) T d < 0 } F_0 = \{ d | \bigtriangledown f(\bar{x})^T d < 0\} F0={d∣▽f(xˉ)Td<0} -
定义: 设集合 S ⊂ R n , x ˉ ∈ c l S . S \subset R^n, \bar{x} \in clS. S⊂Rn,xˉ∈clS., d d d 为非零向量, 若存在数 δ > 0 \delta > 0 δ>0, 使得对任意 λ ∈ ( 0 , δ ) , \lambda \in (0, \delta), λ∈(0,δ), 都有 x ˉ + λ d ∈ S \bar{x} + \lambda d \in S xˉ+λd∈S 则称 d d d 为集合 S S S 在 x ˉ \bar{x} xˉ 的可行方向。
就是移动方向在可行域内
表示为 D = { d ∣ d ≠ 0 , x ˉ ∈ c l S , ∃ δ > 0 , ∀ λ ∈ ( 0 , δ ) , 有 x ˉ + λ d ∈ S } D = \{ d | d \not = 0, \bar{x} \in clS, \exists \delta > 0, \forall \lambda \in (0, \delta), 有 \bar{x} + \lambda d \in S \} D={d∣d=0,xˉ∈clS,∃δ>0,∀λ∈(0,δ),有xˉ+λd∈S}
x ˉ 处 的 可 行 方 向 锥 \bar{x} 处的可行方向锥 xˉ处的可行方向锥 -
定义: 若问题的可行点 x ˉ \bar{x} xˉ 是某个不等式约束 g i ( x ) ≥ 0 g_i(x) \geq 0 gi(x)≥0 变成等式, 则该不等式约束称为关于可行点 x ˉ \bar{x} xˉ 的起作用约束; 否则称为不起作用约束。
表示为
I = { i ∣ g i ( x ˉ = 0 , x ˉ ∈ S ) } I = \{ i| g_i(\bar{x} = 0, \bar{x} \in S) \} I={i∣gi(xˉ=0,xˉ∈S)} -
定义:在起作用约束作对应切线,获得对应梯度,与这两个梯度同时呈锐角的方向为积极约束的可行方向。
表示为 G 0 = { d ∣ ▽ g i ( x ˉ ) T d > 0 , i ∈ I ( x ) } G_0 = \{d | \bigtriangledown g_i(\bar{x})^T d > 0, i \in I(x) \} G0={d∣▽gi(xˉ)Td>0,i∈I(x)}
即由约束条件求出的可行方向
有 G 0 ⊂ D G_0 \subset D G0⊂D
问题标准形式:
m i n f ( x ) \ \ \ \ \ \ \ \ min f(x) minf(x)
s . t . { g i ( x ) ≥ 0 , 不 等 式 约 束 h j ( x ) = 0 , 等 式 约 束 x ∈ R n s.t.\left \{\begin{matrix} g_i (x) \geq 0,不等式约束 \\ \\h_j(x) = 0,等式约束 \\ \\ x \in R^n \end {matrix} \right. s.t.⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧gi(x)≥0,不等式约束hj(x)=0,等式约束x∈Rn
几何最优性条件:设
S
S
S 是
R
n
R^n
Rn 的非空集合,
x
ˉ
∈
S
,
f
(
x
)
\bar{x} \in S, f(x)
xˉ∈S,f(x)在
x
ˉ
\bar{x}
xˉ 处可微, 若
x
ˉ
\bar{x}
xˉ 是局部最优解, 则
F
0
∩
D
=
∅
F_0 \cap D = \emptyset
F0∩D=∅
即所有的可行方向都是上升方向
只有不等式约束时
由于 G 0 ⊂ D G_0 \subset D G0⊂D 所以也有 F 0 ∩ G 0 = ∅ F_0 \cap G_0 = \emptyset F0∩G0=∅,可行域之内不能有空洞
- (F-J条件) 设
x
ˉ
∈
S
,
I
=
{
i
∣
g
i
(
x
ˉ
)
=
0
}
,
f
(
x
)
,
g
i
(
x
)
(
i
∈
I
)
\bar{x} \in S, I = \{ i | g_i(\bar{x}) = 0\}, f(x), g_i(x) (i \in I)
xˉ∈S,I={i∣gi(xˉ)=0},f(x),gi(x)(i∈I) 在
x
ˉ
\bar{x}
xˉ 处可微,
g
i
(
x
)
(
i
∉
I
)
g_i(x) (i \notin I)
gi(x)(i∈/I) 在
x
ˉ
\bar{x}
xˉ 处连续, 若
x
ˉ
\bar{x}
xˉ 是问题的最优解,则存在不全为零的数
w
0
,
w
i
(
i
∈
I
)
w_0, w_i (i \in I)
w0,wi(i∈I) 使得
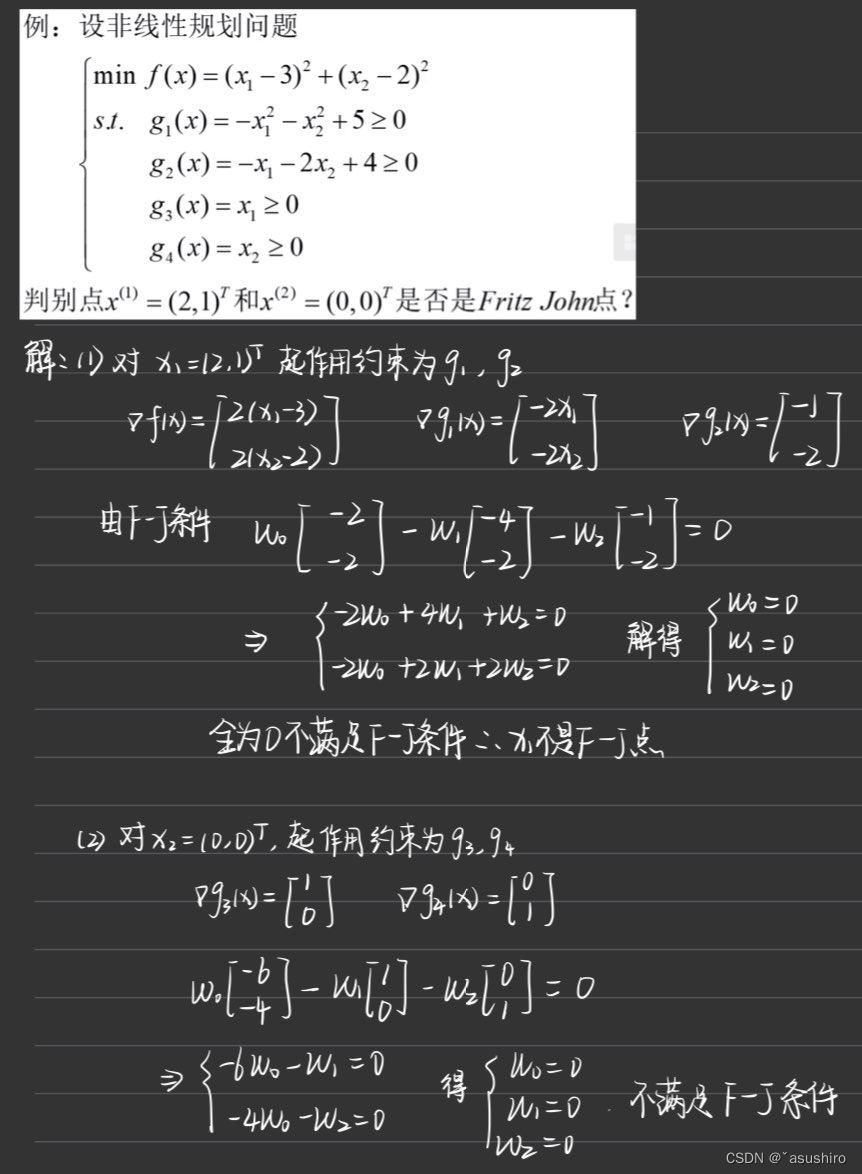
w 0 ▽ f ( x ˉ ) − ∑ i ∈ I w i ▽ g i ( x ˉ ) = 0 w_0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) = 0 w0▽f(xˉ)−i∈I∑wi▽gi(xˉ)=0
称 x ˉ \bar{x} xˉ 为 F − J F-J F−J 点
为必要条件,极小值点一定是 F-J点, 但 F-J点不一定为极小值点

当
w
0
=
0
w_0 = 0
w0=0 是另外另个约束条件的梯度必须能相互抵消,这种情况才有最优解,因此更多的是关注
w
0
≠
0
w_0 \not = 0
w0=0的情况
- (KKT条件) 设
x
ˉ
∈
S
\bar{x} \in S
xˉ∈S ,
f
,
g
i
(
i
∈
I
)
在
x
ˉ
处
可
微
,
g
i
(
i
∉
I
)
在
x
ˉ
连
续
f, g_i(i \in I)在\bar{x} 处可微, g_i(i \notin I) 在\bar{x}连续
f,gi(i∈I)在xˉ处可微,gi(i∈/I)在xˉ连续(保证无空洞),
{
▽
g
i
(
x
ˉ
)
∣
i
∈
I
}
线
性
无
关
\{ \bigtriangledown g_i(\bar{x}) | i \in I\} 线性无关
{▽gi(xˉ)∣i∈I}线性无关, 若
x
ˉ
\bar{x}
xˉ 是局部最优解, 则存在非负数
w
i
,
i
∈
I
,
w_i, i \in I,
wi,i∈I, 使得
▽ f ( x ˉ ) − ∑ i ∈ I w i ▽ g i ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) = 0 ▽f(xˉ)−i∈I∑wi▽gi(xˉ)=0
凸规划的判别方法:
- 可行域是凸集, 目标函数是凸函数
- 可行域是 ≥ \geq ≥的凹函数, 目标函数是凸函数
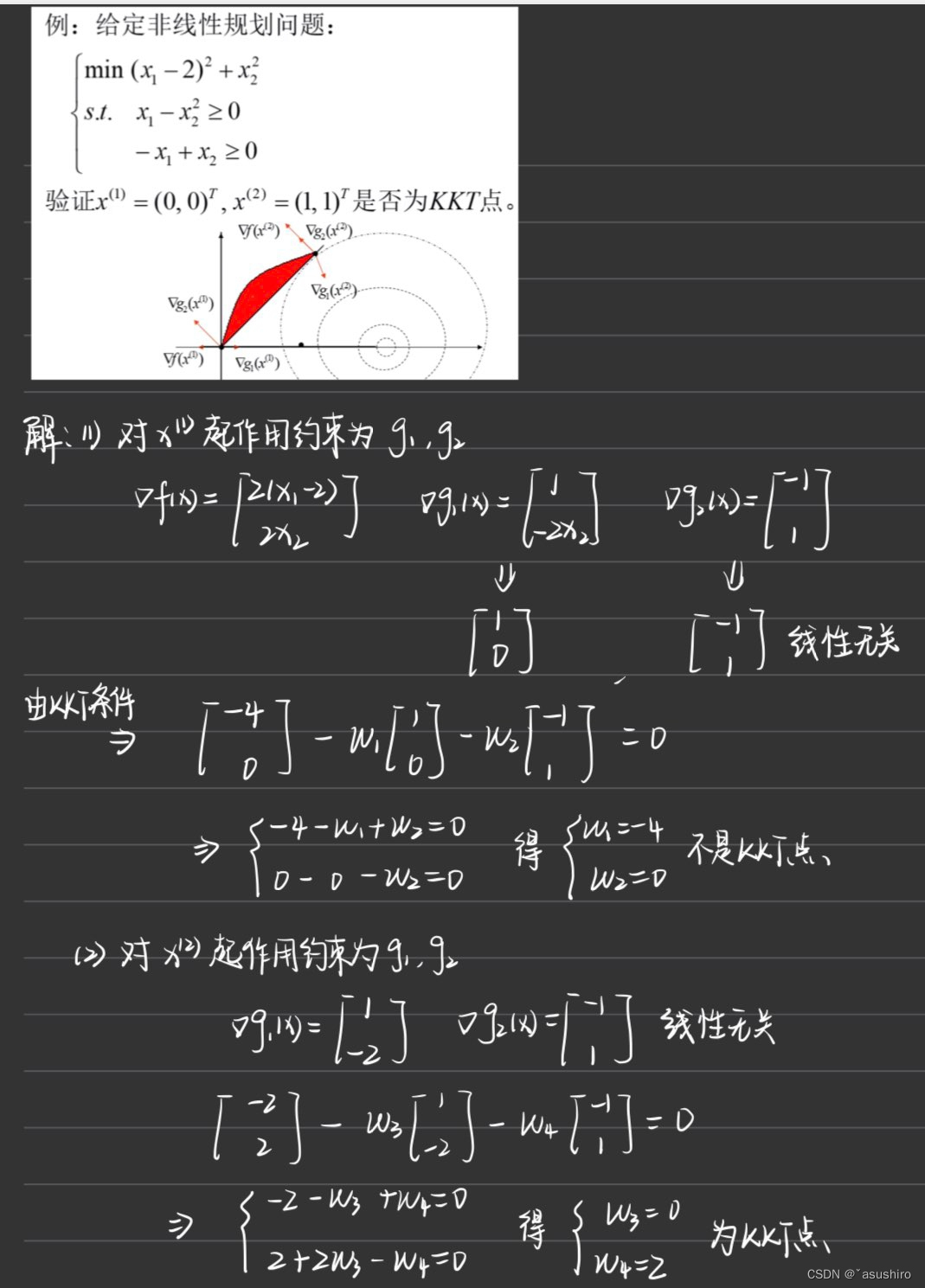
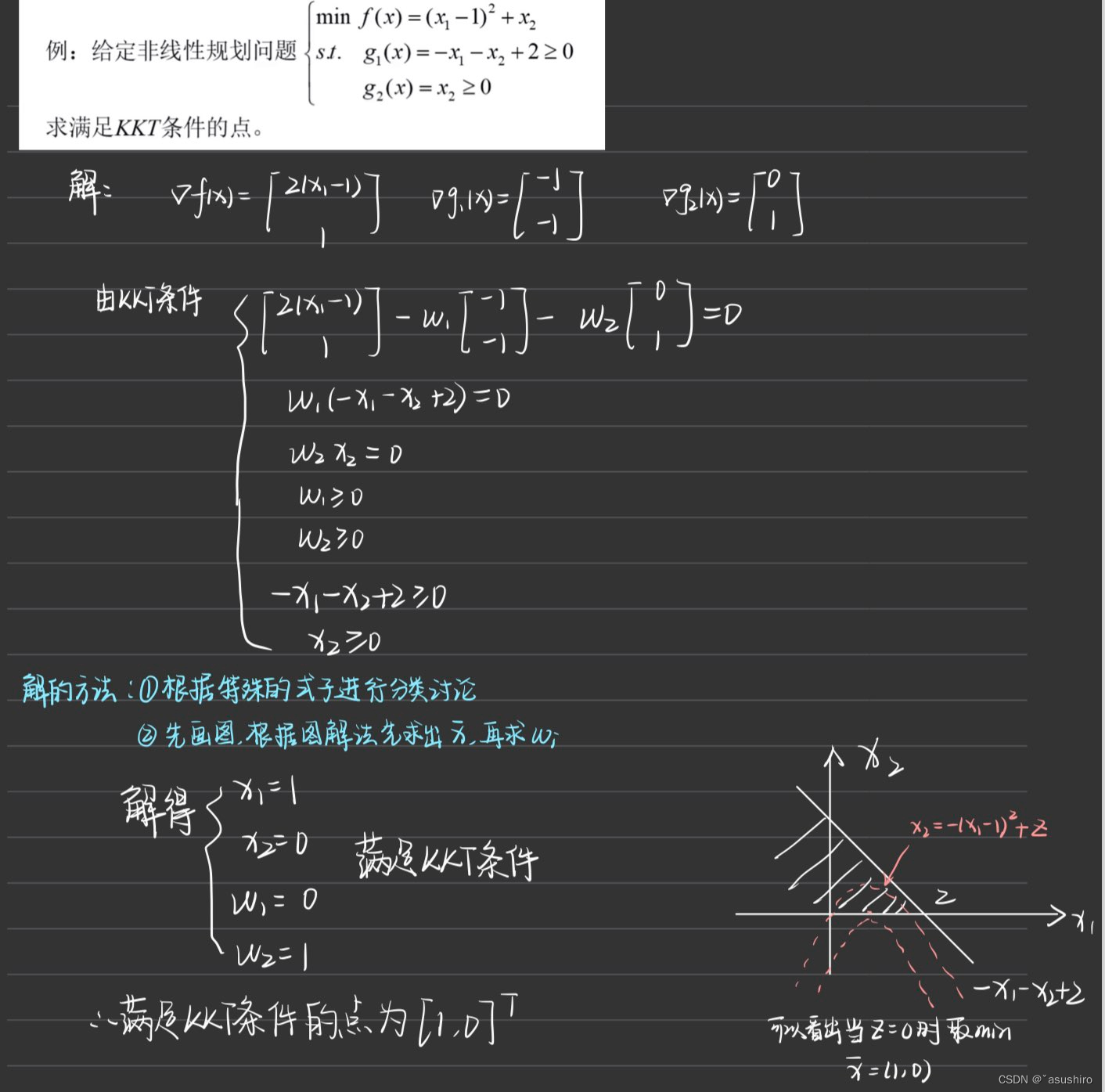
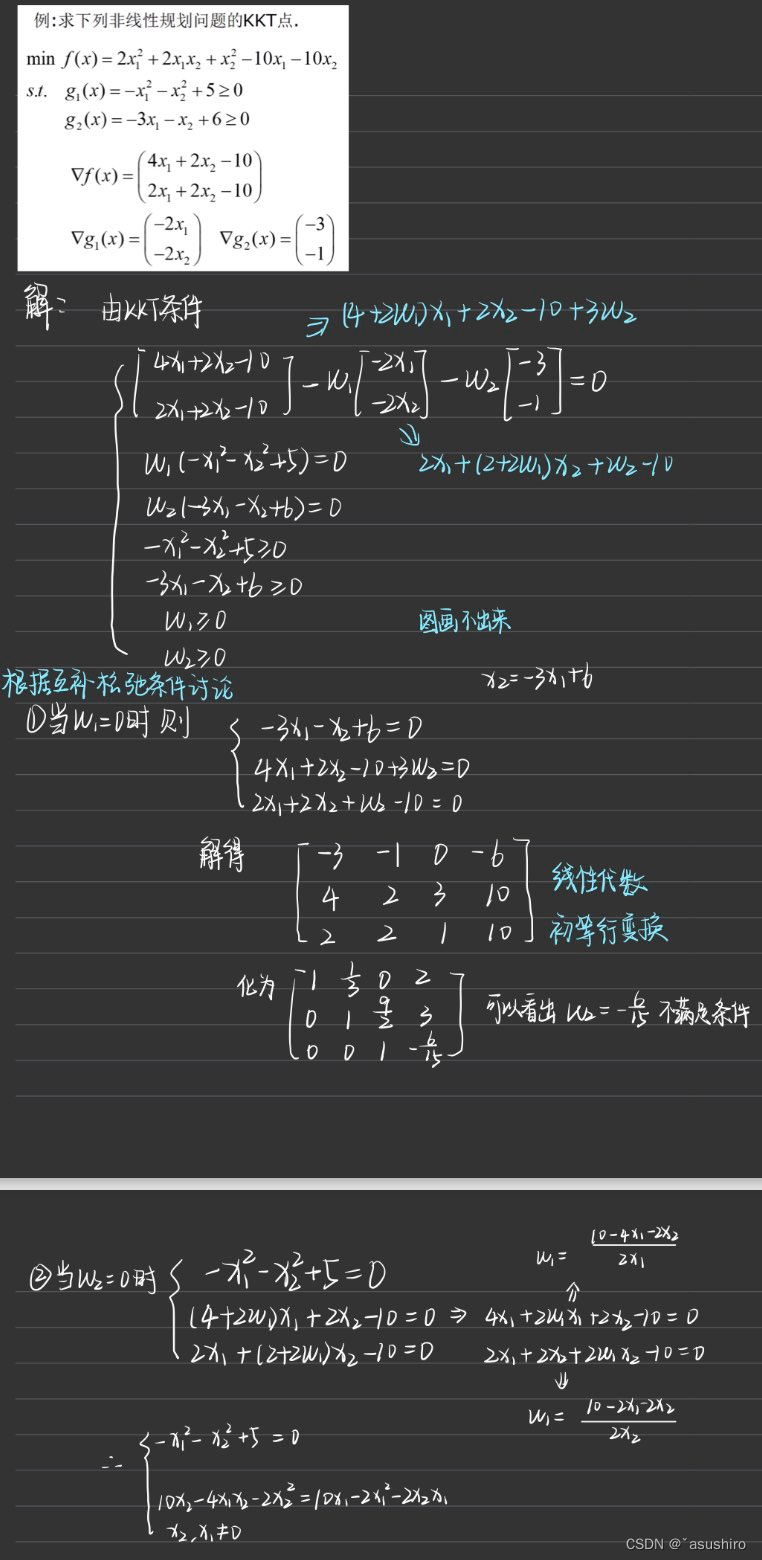
求KKT点
- KKT条件的另一种表述
设 x ˉ ∈ S \bar{x} \in S xˉ∈S , f , g i ( i ∈ I ) 在 x ˉ f, g_i(i \in I)在\bar{x} f,gi(i∈I)在xˉ 处可微, { ▽ g i ( x ˉ ) ∣ i ∈ I } 线 性 无 关 \{ \bigtriangledown g_i(\bar{x}) | i \in I\}线性无关 {▽gi(xˉ)∣i∈I}线性无关, 若 x ˉ \bar{x} xˉ 是局部最优解, 则存在非负数 w i , i = 1 , 2... m w_i, i =1,2...m wi,i=1,2...m 使得
{ ▽ f ( x ˉ ) − ∑ i = 1 m w i ▽ g i ( x ˉ ) = 0 ( 没 要 求 对 应 的 g i ( x ) 为 约 束 条 件 ) w i g i ( x ˉ ) = 0 , i = 1 , 2... m ( 互 补 松 弛 条 件 ) w i ≥ 0 i = 1 , 2... m \left \{\begin{matrix} \bigtriangledown f(\bar{x}) - \sum\limits_{i = 1}^{m} w_i \bigtriangledown g_i(\bar{x}) = 0(没要求对应的g_i(x)为约束条件) \\ \\w_ig_i(\bar{x}) = 0, i = 1, 2...m (互补松弛条件) \\ \\ w_i \geq 0 i = 1,2...m \end {matrix} \right. ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧▽f(xˉ)−i=1∑mwi▽gi(xˉ)=0(没要求对应的gi(x)为约束条件)wigi(xˉ)=0,i=1,2...m(互补松弛条件)wi≥0i=1,2...m
通过这个表述方式,加上原来的约束然后将所有的方程列出来求解
有人会算的话请留言,感谢
下一篇
最优化理论复习–最优性条件(二)