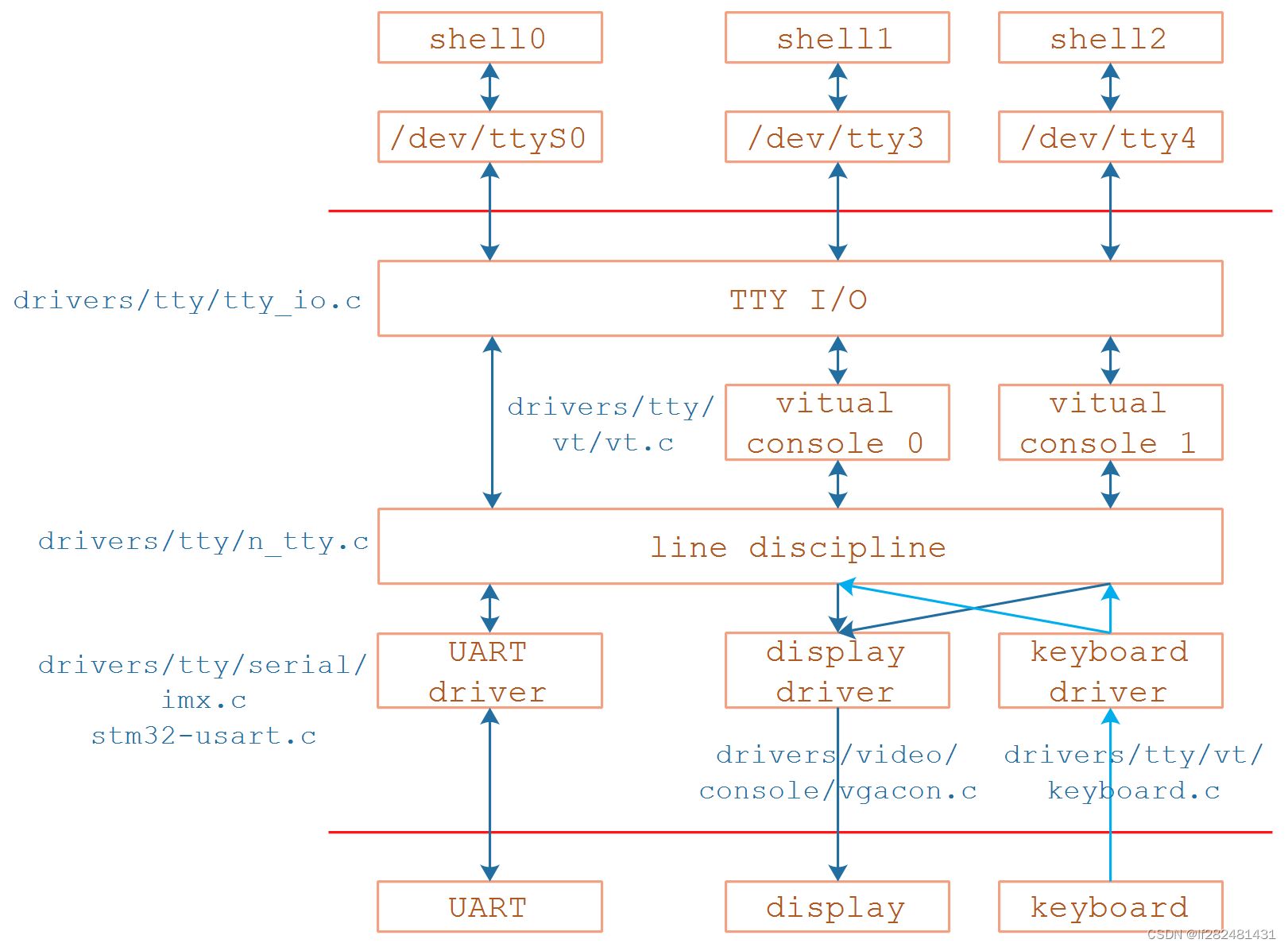
tty 驱动程序框架
tty 驱动程序从下往上分别是设备驱动层、行规程、终端虚拟化、TTY I/O层,它们的功能如下:
- 设备驱动层:用于驱动设备,如串口、显示器、键盘等。
- 行规程:用于处理控制字符、回显输入数据、缓存输入数据、显示数据输出等,如果应用层不需要这些处理机制可以将行规程设置为原始模式,设置方法参考11.1Linux串口应用程序开发。
- 终端虚拟化:用于对显示器、键盘、鼠标组成的终端进行虚拟化。
- TTY I/O层:与应用层进行交互。
struct uart_driver 对象
uart_driver 对象表示一个 uart 驱动(一个串口驱动可以由多个串口端口),其核心成员如下:
//所属模块
struct module *owner;
//驱动名称
const char *driver_name;
//设备名称,串口设备文件名以此为基础生成
const char *dev_name;
//主设备号,为0表示系统自动分配
int major;
//起始次设备号,即第一个串口的次设备号
int minor;
//此驱动支持的串口个数
int nr;
//若驱动支持 console 则指向对应的 serial console ,否则为 NULL
struct console *cons;
//串口的状态信息,每个串口端口都有自己的状态信息,其中主要包括 tty_port 和 uart_port
struct uart_state *state;
//串口驱动对应的 tty 驱动
struct tty_driver *tty_driver;
struct console 对象
console 对象用于描述一个控制台驱动,其核心成员如下:
//该 console 的名称,配合index字段使用,如果name为“ttySTM”,index字段为小于0,则可以和“console=ttySTMn“(n=0,1,2…)来确定index字段的值
char name[16];
//写函数
void (*write)(struct console *, const char *, unsigned);
//读函数
int (*read)(struct console *, char *, unsigned);
//获取 console 对应的 tty 驱动
struct tty_driver *(*device)(struct console *, int *);
//初始化 console
int (*setup)(struct console *, char *);
//console 标志
short flags;
//console 索引,若小于 0 则由命令行参数确定
short index;
struct uart_state 对象
uart_state 对象表示一个串口端口的状态信息,其核心成员如下:
//串口端口所属的 tty 端口,主要包含 tty 端口的 buf 、端口操作函数等信息
struct tty_port port;
//串口端口,对应一个串口设备,主要包含串口的硬件操作函数等信息
struct uart_port *uart_port;
struct uart_port 对象
uart_port 对象表示一个串口端口,其核心成员如下:
//配置 RS485
int (*rs485_config)(struct uart_port *, struct serial_rs485 *rs485);
//中断号
unsigned int irq;
//串口基准时钟
unsigned int uartclk;
//发送 FIFO 大小
unsigned int fifosize;
//流控字符
unsigned char x_char;
//IO 类型
unsigned char iotype;
//串口标志
upf_t flags;
//操作函数集合
const struct uart_ops *ops;
//端口索引
unsigned int line;
//寄存器逻辑基地址
resource_size_t mapbase;
//寄存器映射大小
resource_size_t mapsize;
//所属父设备
struct device *dev;
//RS485 配置信息
struct serial_rs485 rs485;
struct tty_driver 对象
tty_driver 对象用于表示一个 tty 驱动,其核心成员如下:
//幻数,用于检查结构体是否是一个 tty_driver
int magic;
//cdev 指针数组,用于关联 tty_port 的字符设备驱动
struct cdev **cdevs;
//所属模块
struct module *owner;
//驱动名称
const char *driver_name;
//设备名称,对于非 TTY_DRIVER_TYPE_PTY 类型的 tty_port ,其设备文件名以此为基础生成
const char *name;
//主设备号,为0表示系统自动分配
int major;
//起始次设备号,即第一个 tty_port 的次设备号
int minor_start;
//此驱动支持的 tty_port 个数
unsigned int num;
//tty 类型
short type;
//tty 子类型
short subtype;
//初始配置参数
struct ktermios init_termios;
//tty 驱动标志
unsigned long flags;
//tty_struct 指针数组
struct tty_struct **ttys;
//tty_port 指针数组
struct tty_port **ports;
//ktermios 指针数组
struct ktermios **termios;
//tty 驱动操作函数接口
const struct tty_operations *ops;
串口驱动注册过程
串口驱动注册包括两个主要步骤,分别是注册串口驱动和在串口驱动下添加串口端口。
5. 串口驱动注册过程
构建并初始化 struct uart_driver
调用 uart_register_driver 函数注册 struct uart_driver
根据 struct uart_driver 中的端口数量为其分配 struct uart_state ,struct uart_state 中包含一个 struct tty_port 和一个 struct uart_port
调用 alloc_tty_driver 函数分配一个 struct tty_driver
通过宏定义调用 __tty_alloc_driver 函数
分配 struct tty_driver,并初始化
为前面分配的 struct tty_driver 分配 struct tty_struct 、 struct tty_port 、 struct ktermios 、 struct cdev 指针数组(这里只分配了指针)
将分配的 struct tty_driver 与 struct uart_driver 关联
利用 struct uart_driver 初始化前面分配的 struct tty_driver
调用 tty_set_operationsstruct uart_driver 函数设置 struct tty_driver 的操作函数集合
循环调用 tty_port_init 函数初始化 struct uart_state *state 中的 struct tty_port port
调用 tty_register_driver 函数将 struct uart_driver 中的 struct tty_driver *tty_driver 注册到系统中
注册 uart_driver 的本质就是注册 tty_driver ,只是这个 tty_driver 属于uart_driver ,且对应的的操作函数集合具体操作对象为 uart_driver ( uart_driver 继承于 tty_driver )。
6. 在串口驱动下添加串口端口的过程
先注册 struct uart_driver ,然后构建并初始化 struct uart_port
调用 uart_add_one_port 函数在 struct uart_driver 中添加一个 struct uart_port
根据 struct uart_port 中的 unsigned int line 成员从 struct uart_driver 中找到对应的 struct uart_state 及 struct uart_state 中的struct tty_port
初始化对应的 struct uart_state ,并将其与 struct uart_port 进行关联
通过传入的 struct uart_driver 初始化 struct uart_port,其中包括次设备号、端口名称、端口的 console
调用 tty_port_link_device 函数,将 struct uart_state 中的 struct tty_port 与 struct uart_driver 中的 struct tty_driver 进行关联
调用 uart_configure_port 函数对 struct uart_port *uport 进行一些配置
如果 struct uart_port 的 iobase 、 mapbase 、 membase 均为 0 则直接退出
如果 struct uart_port 的 flags 设置了 UPF_BOOT_AUTOCONF 则调用 config_port 函数配置串口硬件
如果 struct uart_port 的 struct console *cons 不为空,且还未使能则调用 register_console 注册 console
利用启动命令行参数中的 console_cmdline 参数进行匹配,匹配成功则设置 console 的 index ,然后调用 console 的 setup 函数进行硬件初始化
将 console 添加到 console_drivers 链表中
设置 struct tty_port 中的 console 属性(需要 struct uart_port 的 line 与 struct console 的 index 一致才设置,而 struct console 的 index 值可以由 bootargs 参数确定)
调用 tty_port_register_device_attr_serdev 函数注册 struct tty_port
调用 tty_register_device_attr 函数注册 tty 设备
调用 tty_line_name 生成设备文件名
分配一个 device 对象,并对其初始化(这里配置了设备号和设备名,注册后会创建设备文件)
调用 device_register 注册分配的 device
调用 tty_cdev_add 注册字符设备驱动
分配 cdev 对象,并进行初始化,主要配置操作函数集合
调用 cdev_add 将分配 cdev 对象注册到内核
在 uart_driver 下添加 uart_port 的本质就是在其对应的 tty_driver 下添加 tty_port ,只不过事先通过 uart_state 将 uart_port 和 tty_port 进行了关联
串口打开过程
添加端口的时注册一个 cdev ,并设置其操作函数集合为 tty_fops ,其中提供了 tty_open 函数,在应用层执行 open 时会通过虚拟文件系统调用到此函数,其执行过程如下:
在应用层执行 open 时会通过虚拟文件系统调用 tty_open
执行 tty_open_current_tty 函数尝试打开进程所属的 tty (其设备文件名是/dev/tty,设备ID应该是MKDEV(5, 0)),对于打开串口此函数会执行失败
tty_open_current_tty 函数执行失败后会执行 tty_open_by_driver 函数来打开 tty
执行 tty_lookup_driver 函数找到对应的 tty_driver
执行 tty_driver_lookup_tty 函数从 tty_driver 找到对应的 tty_struct ,对于打开过的 tty 会执行成功,然后对 tty 进行检查和设置,并返回对应的 tty
tty_driver_lookup_tty 函数未找到 tty 则调用 tty_init_dev 函数分配 tty_struct 并进行相应的配置
调用 alloc_tty_struct 分配 tty_strct
调用 kzalloc 分配 tty_strct
调用 tty_ldisc_init 绑定行规程
调用 tty_driver_install_tty 将 tty_strct 安装到 tty_driver 中
调用 tty_ldisc_setup 对配置行规程
通过 tty->ops->open 指针调用 serial_core.c 中 的 uart_open 函数
调用 tty_port_open 打开对应端口
通过 port->ops->activate 调用 serial_core.c 中的 uart_port_activate 函数
调用 uart_startup 函数启动串口
调用 uart_port_startup 函数启动串口
通过 uport->ops->startup 调用串口驱动提供的 startup 函数
串口读过程
读串口数据可分为两部分:
7. 应用程序从行规程中读取数据
与执行 open 过程类似,在应用层执行 read 时会通过虚拟文件系统调用 tty_read 函数,其执行过程如下:
在应用层执行 read 时会通过虚拟文件系统调用 tty_read
通过 tty_ldisc_ref_wait 函数得到 tty 的行规程
通过 ld->ops->read 调用行规程的 read 函数,这里通常是 N_TTY中的 n_tty_read 函数
在 n_tty_read 函数中无数据则休眠等待数据,有数据则将数据拷贝到应用层
- 串口向行规程上报数据
串口收到数据进入中断程序
中断程序从硬件读取数据
调用 tty_insert_flip_string 函数将数据存入 tty_port 的 tty_buffer 中
调用 tty_flip_buffer_push 函数通知行规程处理数据
调用 tty_schedule_flip 函数启动数据处理
调用 queue_work 函数启动一个工作队列处理数据,这里的工作队列处理函数为 flush_to_ldisc 函数
串口写过程
在应用层执行 write 时会通过虚拟文件系统调用 tty_write 函数,然后 tty_write 函数通过绑定的行规程调用到行规程的 n_tty_write 函数,接下来由行规程对数据处理后调用 serial_core.c 中的 uart_flush_chars 函数启动发送,如果行规程设置原始模式则不进行处理,直接调用 serial_core.c 的 uart_write 函数启动发送(发送过程由串口的中断或 DMA 完成),其流程如下:
在应用层执行 write 时会通过虚拟文件系统调用 tty_write 函数
通过 tty_ldisc_ref_wait 函数获得与tty绑定的行规程
调用 do_tty_write 函数执行数据发送操作(在执行 do_tty_write 函数传入的是行规程 write 函数作为实际的写函数)
通过 copy_from_user 函数将数据拷贝到 write_buf 中
通过 write 指针调用行规程的 write 函数,这里对应的是 n_tty_write 函数
如果设置了 OPOST 标志则对数据进行处理后调用 tty 操作函数集合中的 flush_chars 函数发送数据,这里实际对应的是 uart_flush_chars 函数
调用 uart_start 启动串口发送
调用 __uart_start 函数
调用 uart_port 中的 start_tx 函数,即硬件驱动提供的发送启动函数
如果没有设置 OPOST 标志则调用 tty 操作函数集合中的 write 函数发送数据,这里实际对应的是 uart_write 函数
将数据写入到 uart_state 的 buf 中后在调用 __uart_start 启动串口发送
调用 uart_port 中的 start_tx 函数,即硬件驱动提供的发送启动函数
通过 tty_ldisc_deref 释放对行规程的占用
console 注册过程
在前面的串口驱动注册过程已经介绍了 console 的注册,这里在简单梳理一下 console 的注册步骤:
构建并初始化 struct console 对象
将 struct console 对象的地址给 struct uart_driver 的 cons 成员
调用 uart_register_driver 函数注册 struct uart_driver
调用 uart_add_one_port 函数添加一个串口端口,此时会顺便完成对 console 的注册
将 struct uart_driver 的 cons 赋给 struct uart_port 的 cons
调用 uart_configure_port 函数
若 struct uart_port 的 cons 成员有效,且未使能则调用 register_console 函数注册 console
利用启动命令行中的 console_cmdline 参数进行匹配,匹配成功则设置 console 的 index ,然后调用 setup 函数进行配置
将新注册的 console 添加到 console_drivers 链表中
当 struct uart_port 的 line 与其 console 的 index 一致则设置 struct tty_port 的 console 标志(因此在多个 uart_port 中只有一个 uart_port 真正的拥有 struct uart_driver 中的 console)
printk 执行流程
printk 的执行流程大致如下:
通过 va_start 取出不定参数列表,然后调用 vprintk_func
然后调用 vprintk_default 函数
再调用 vprintk_emit 函数
调用 vprintk_store 函数
使用 vscnprintf 进行格式化处理
调用 log_output 输出数据(并未通过硬件输出,实际上是将数据存储在 log_buf 中)
调用 console_unlock 函数,可能是直接调用,也可能是通过 wake_up_klogd 函数唤醒工作队列,然后由工作队列处理函数去调用
通过 log_from_idx 从 log_buf 取出一个 msg
如果 msg 优先级不够则跳过
通过 call_console_drivers 将数据从 console 输出,系统中可能会有多个 console
printk 使用
/*
* fmt 格式字符串,其前面还包含描述优先级的字符,它们的定义如下:
* ASCII的标题开始字符(SOH),表示后面是优先级字符
* #define KERN_SOH "\001"
* 不同优先级定义,数字越小优先级越高
* #define KERN_EMERG KERN_SOH "0"
* #define KERN_ALERT KERN_SOH "1"
* #define KERN_CRIT KERN_SOH "2"
* #define KERN_ERR KERN_SOH "3"
* #define KERN_WARNING KERN_SOH "4"
* #define KERN_NOTICE KERN_SOH "5"
* #define KERN_INFO KERN_SOH "6"
* #define KERN_DEBUG KERN_SOH "7"
* ... 不定参数列表,与格式字符串有关
**/
int printk(const char *fmt, ...)
设置系统的输出优先级:
系统输出等级存储在 /proc/sys/kernel/printk 文件中,它有4个参数,依次是:控制台消息级别、默认信息级别、最小控制台级别、默认控制台级别
early_printk
当在 uboot 的命令行参数中传入 earlyprintk 且在内核配置选项中使能 Early printk 选项后系统会调用 setup_early_printk 函数创建一个 console (此 console 的 write 函数最终会调用 printascii 输出数据, STM 官方内核已经通过汇编实现 printascii 函数),用于在串口初始化完成以前输出调试信息,具体使用步骤如下:
- 配置内核
Kernel hacking --->
[*] Kernel low-level debugging functions (read help!)
(0x40010000) Physical base address of debug UART (NEW)
(0xfe010000) Virtual base address of debug UART (NEW)
[*] Early printk
- 在 bootargs 中加入 earlyprintk
earlyprintk 注册过程:
当 bootargs 中包含 earlyprintk 且内核配置选项中使能 Early printk 时在系统初始化阶段会调用 setup_early_printk
调用 register_console 注册一个 console ,用于系统早期输出(通过 console 通过的 write 函数输出,在STM32中此 write 函数最终会调用 printascii 输出数据)