一、基本概念理解
伺服电机旋转一圈的脉冲数
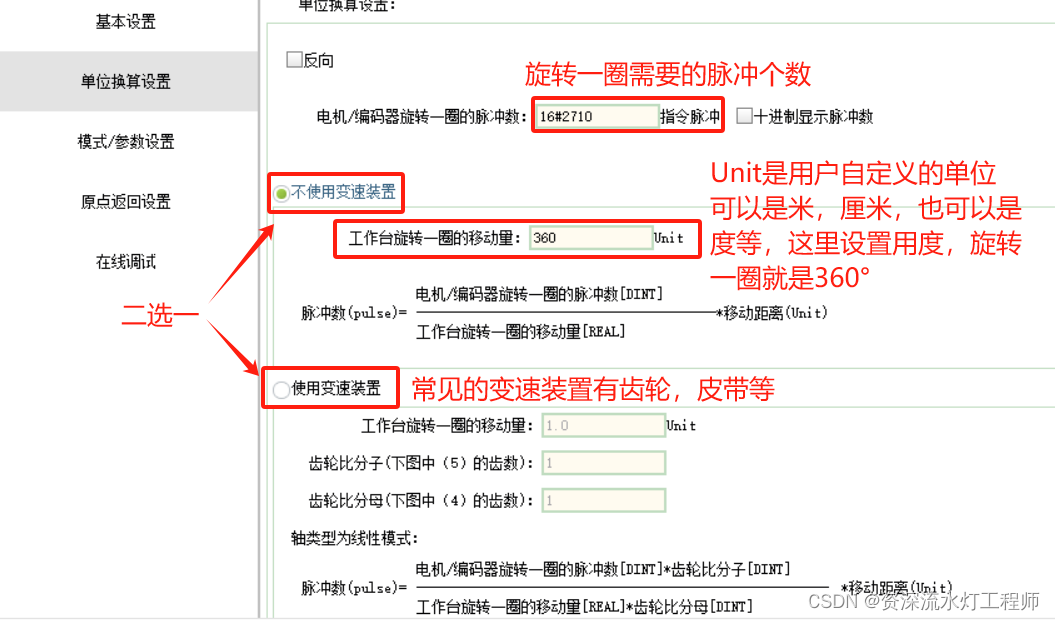
伺服电机上都装有一个编码器,这个编码器用于产生脉冲,常见伺服电机转一圈一般是产生10000个脉冲。相当于电机转360°,产生了10000个脉冲,那旋转1°就产生10000/360 = 27.7个脉冲。同理,我们用脉冲控制伺服控制器来驱动伺服电机旋转,也是需要10000个脉冲电机才转一圈,发送27.7个脉冲,电机就转1°。也可以理解为电机的旋转位置精度为360/10000 = 0.036°。
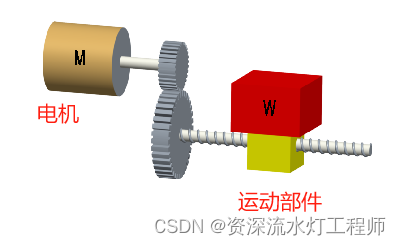
变速装置
常见的变速装置可以理解为齿轮,变速系数就是齿轮比,与电机相连的齿轮作为分母,与运动部件相连的齿轮作为分子。电机端的齿轮的齿数小,运动部件相当于减速,对应的力矩和定位精度都会增加。比如变速装置是一个10:1的减速机,那旋转部分的位置精度就达到0.0036°。
二、H5U基本的轴控指令
点动指令MC_Jog
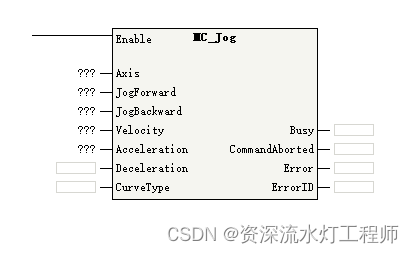
汇川H5U系列PLC将轴控指令都写成块状,用户只需要去设置参数即可,如上图所示的MC_Jog指令块就是H5U系列PLC的点动指令,左边是输入,右边是输出。三个问号“???”所对应的引脚是一定要填内容的,而且是正确的内容,方框所对应的引脚是可以不用配置指令块也能工作的。
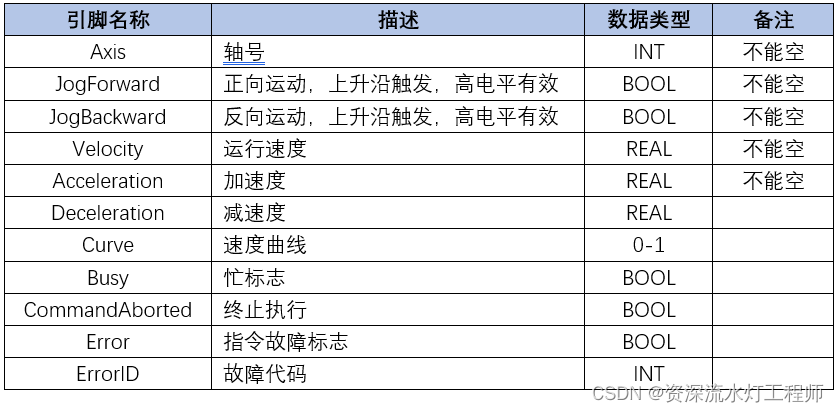
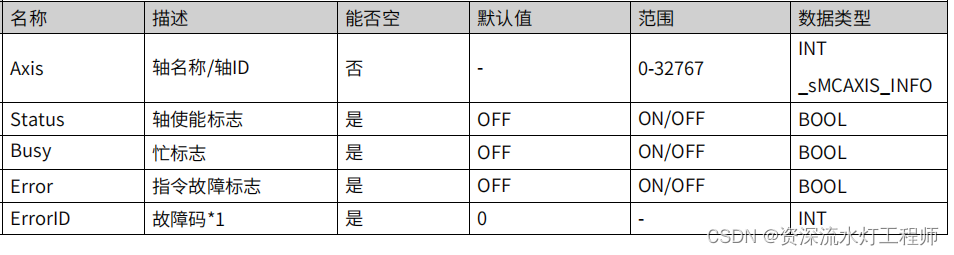
MC_Jog指令块引脚说明
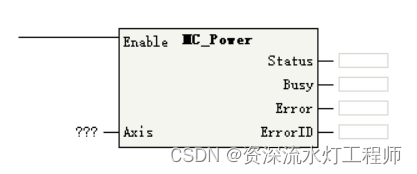
轴使能指令MC_Power
MC_Jog指令的运行前提是MC_Power指令已经将轴设置为使能状态。
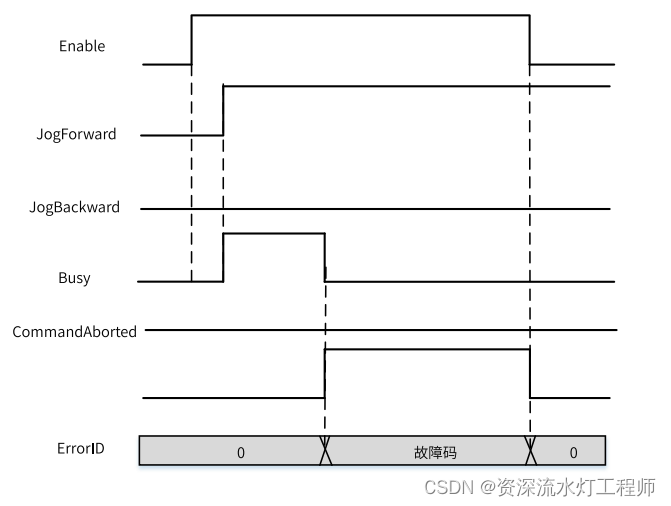
轴使能指令的时序图
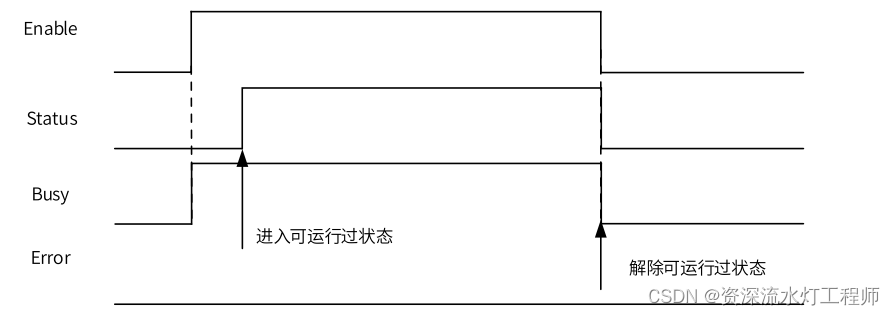
MC_Power指令适用于EC总线轴和本地脉冲轴,用于设定轴的使能状态,
在Enable为高电平时有效,在Enable的上升沿时,所设置的轴就选中了;
通过时序图可以看出只要Enable为ON,轴就处于Busy状态,Busy处于高电平,要过一点时间Status才处于ON;
三、点动轴控的基本使用
3.1、创建一个轴

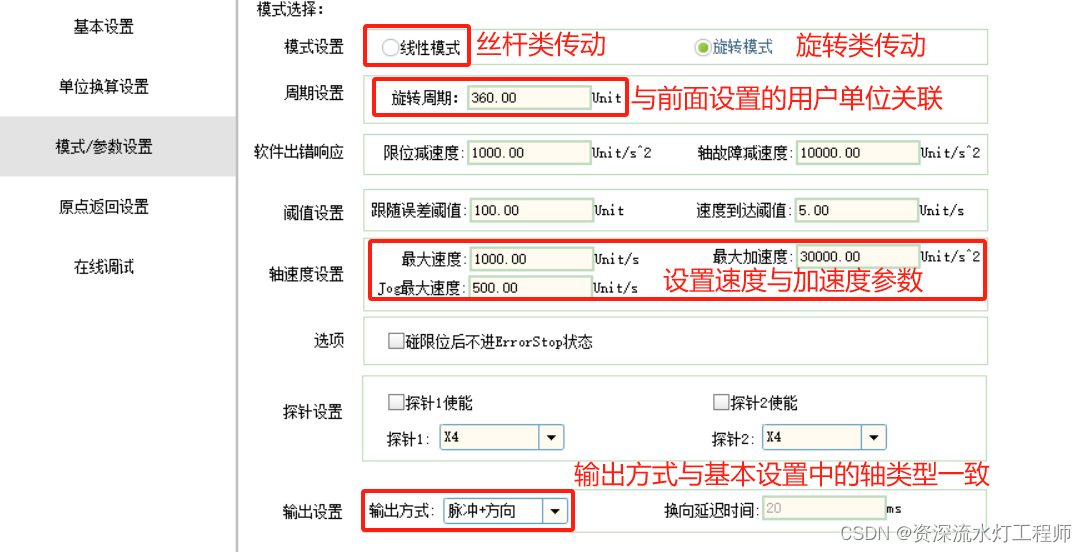
3.2、轴设置
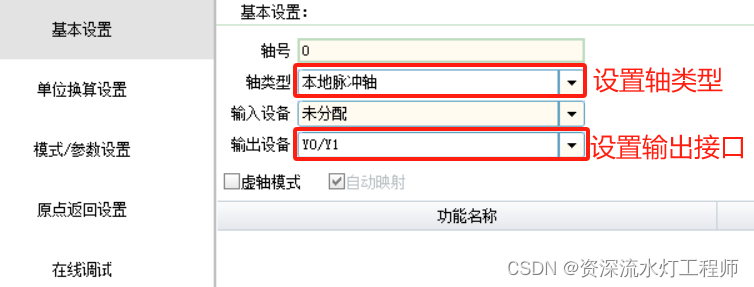
1、基本设置是设置轴的类型与输出接口
2、单位换算设置
3、模式与参数设置
四、简单的点动控制
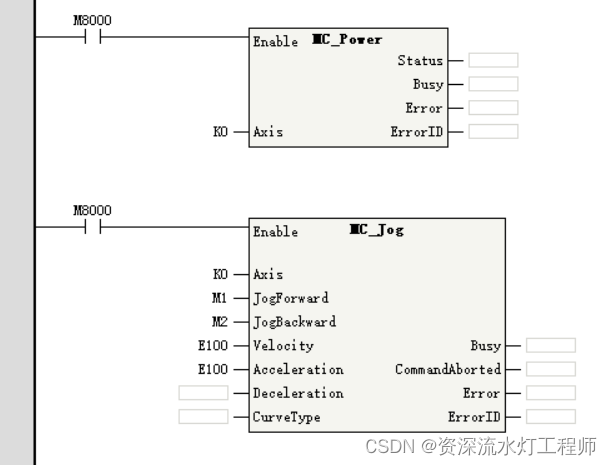
1、MC_Power何MC_Jog指令都是上电就使能,通过M8000寄存器实现,实际工程应用中不建议这么简单粗暴;
2、Axis引脚对应的都是K0轴,K0表示Axis0,K1表示Axis1,K2表示Axis2,以此例推;
3、在点动指令MC_Jog中设置运动方向,运动速度等参数;
4、M1接通,轴所对应的电机就正向运动,M2接通,轴所对应的电机就反向运动;
5、速度Velocity和加速度Acceleration所能设置的数据范围要与前面轴参数设置里面的参数对应起来;
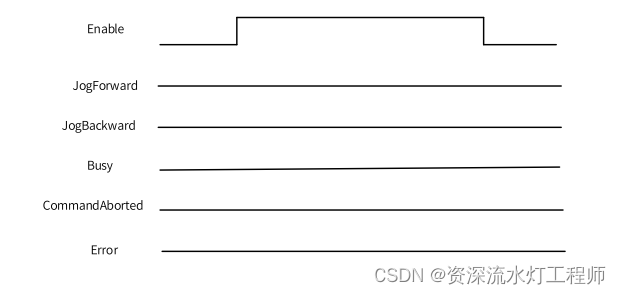
MC_Jog指令时序
仅Enable输入有效时,指令没有任何动作
当Enable、JogForward输入有效时
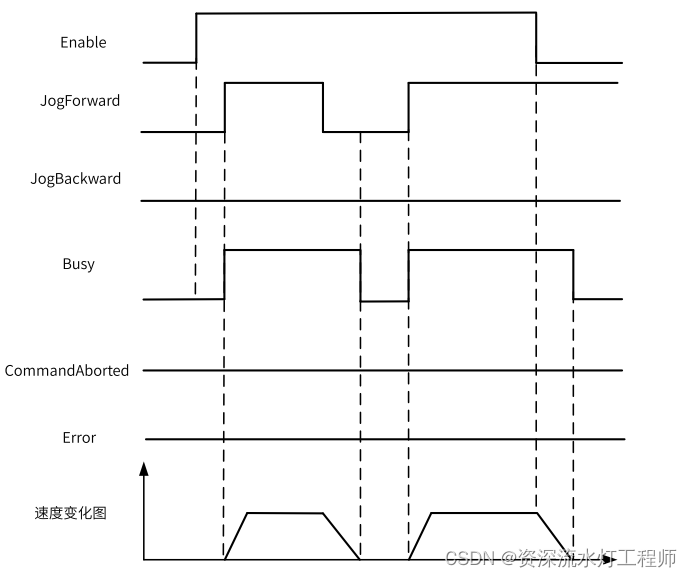
当Enable、JogForward输入有效后,将JogBackward写入ON时
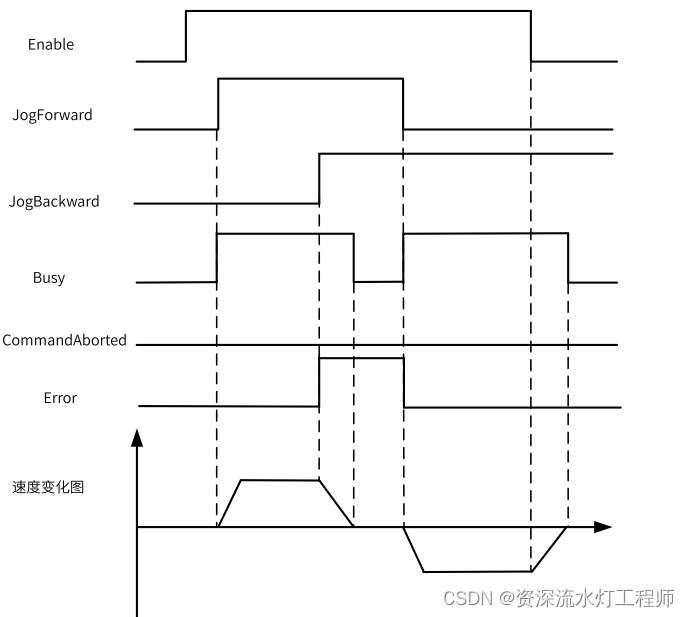
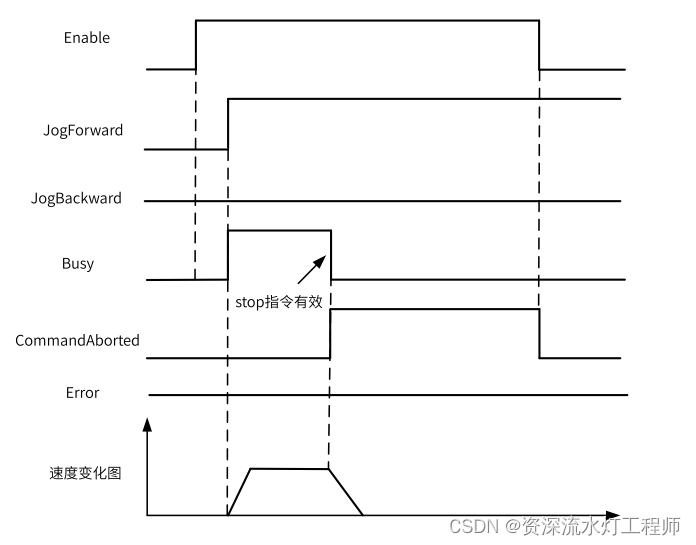
当指令执行期间被Stop指令打断时
轴报错时