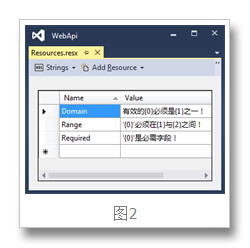
ASP.NET MVC采用Model绑定为目标Action生成了相应的参数列表,但是在真正执行目标Action方法之前,还需要对绑定的参数实施验证以确保其有效性,我们将针对参数的验证成为Model绑定。总地来说,我们可以采用4种不同的编程模式来进行针…
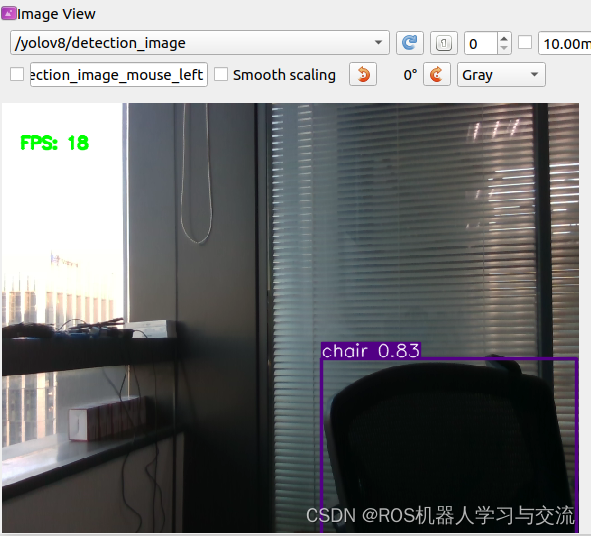
YOLOv8是一种物体检测算法,是YOLO系列算法的最新版本。 YOLO(You Only Look Once)是一种实时物体检测算法,其优势在于快速且准确的检测结果。YOLOv8在之前的版本基础上进行了一系列改进和优化,提高了检测速度和准确性。…



![MyBatis中select语句中使用String[]数组作为参数](https://img-blog.csdnimg.cn/c8771eab60b04859ad0b466ee8736b86.gif)