在 VVC 中,帧内预测过程分为三个步骤:首先,从当前 CU 左侧和上方相 邻块获取参考像素,并对获取的参考像素值进行平滑滤波。其次,基于参考像素 预测得到当前 CU 像素值。最后为了提高预测像素值的精度,平滑滤波得到的预 测 CU 边界。
(1)更多样的角度模式
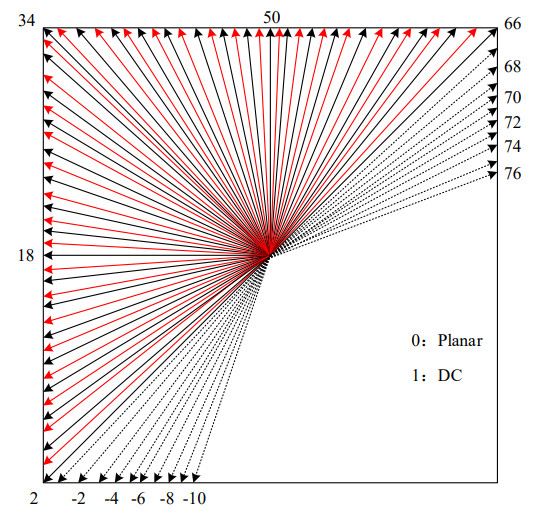
在 H.266/VVC 中,为了能充分捕捉视频中呈现的精细边缘方向以提高视频 压缩效果,将 H.265/HEVC 编码中已有的 35 个角度方向细分增加到了 65 个,并 保留了 Planar 模式及 DC 模式,如图 2-2 所示,红色箭头方向为 H.266/VVC 新 增的角度方向,所有 CU 大小的帧内亮度预测和帧内色度预测都可以使用如图 2-2 所示的帧内预测模式。
由于帧内角度预测模式数量的增加,并考虑了相邻两个帧内模式可用的基础 上,为了使得最有可能的模式(Most probable modes,MPMs)生成的列表复杂度低, 将 MPMs 的数量增加到了 6 个。在 H.266/VVC 中,由默认帧内预测模式、相 邻 CU 帧内预测模式及导出的帧内预测模式三个方面构建 MPMs 列表。
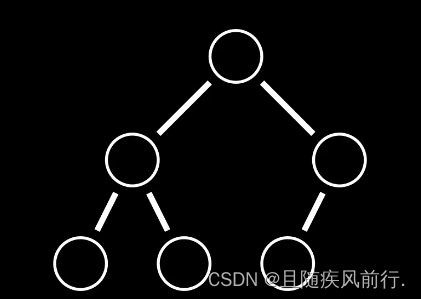
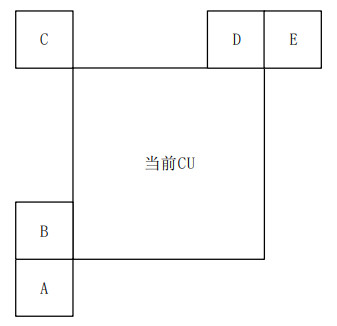
通过参考左侧和上方相邻 CU 的帧内模式来构造 MPMs 列表,如图 所 示,其中 A 代表左下方相邻的已编码块模式,B 代表左侧相邻的已编码块模式, C 代表左上方相邻的已编码块模式,D 代表上方相邻的已编码块模式,E 代表右 上方相邻的已编码块模式,则统一的 MPMs 列表的构造如下:
1)没有相邻块时,默认 Planar 模式。
2)左侧和上方都是非角度模式,MPMs 列表为{Planar,DC,垂直(50), 水平(18),垂直−4,垂直+4}。
3)左侧和上方其中一个为角度模式,另一个为非角度模式,设置左侧和上 方中模式最大的为 Max,MPMs 列表为{Planar,Max,DC,Max-1,Max+1, Max-2}。
4)左侧相邻已编码块和上方相邻已编码块都为角度模式。设置左侧和上方 模式最大的为 Max1,Max2,如果两者差值在 2~62 之间,其 MPMs 列表为{Planar, B,D,DC,Max1-1,Max1+1}。反之,MPMs 列表为{Planar,B,D,DC,Max1- 2,Max1+2}
5)如果都为角度模式且相同,MPMs 列表为{Planar,B,B-1,B+1,DC, B-2}。
在生成 MPMs 列表的过程中,通过不断删除重复的模式,保证只有唯一的 模式可以被包含在 MPMs 列表中。
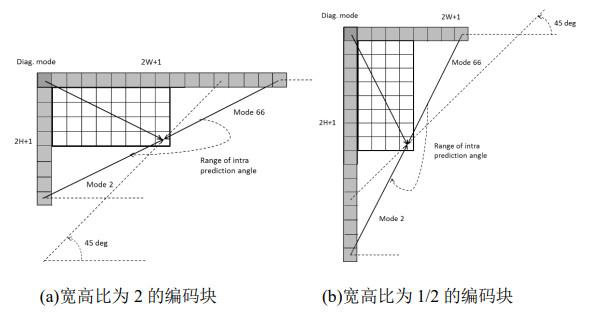
因为 H.266/VVC 采用了四叉树划分、二叉树划分及三叉树划分的多类型树 划分结构,所以 CU 形状可能为正方形或矩形。但是由于传统的帧内角度预测方 向的范围为 45 度到负 135 度,而为了使得多叉树划分产生的非正方形块支持 65 种角度预测方向,在 H.266/VVC 中提出了广角预测模式以使帧内预测方向能够 超出传统的帧内预测方向的范围。广角帧内预测示例如图 2-4 所示,定义了 长度为 2W+1 的上部参考像素,以及长度为 2H+1 的左侧参考像素。通过广角帧 内预测,自动地替换掉了部分传统的帧内角度预测模式,保证帧内预测模式总数 量不变,并且保持原有的帧内模式编码方式,如图 所示,黑色虚线箭头为新 增的宽角度模式的方向。
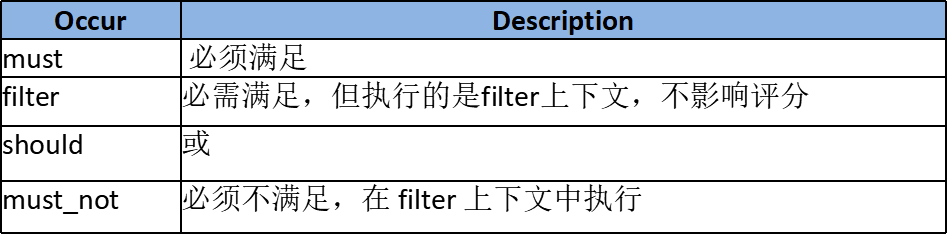
在广角帧内预测模式下,通过当前块的宽高比来决定哪些传统的帧内预测模 式被替代成广角模式。如表 所示,当宽高之比等于 2 时,模式 2,3,4,5, 6,7 将自适应地替换为 67,68,69,70,71,72 模式。被改变的模式使用未变 前的模式序号发送至编码器,在解码器解码后将其重新变为广角模式。

在广角帧内预测下,两个垂直相邻的预测像素点可以使用两 个不相邻的参考像素点。为了减少像素样本间隙 Δpα 增大带来的负面影响,使用 了低通参考样本滤波和边缘平滑技术减小影响。
(2)位置决定的帧内预测组合
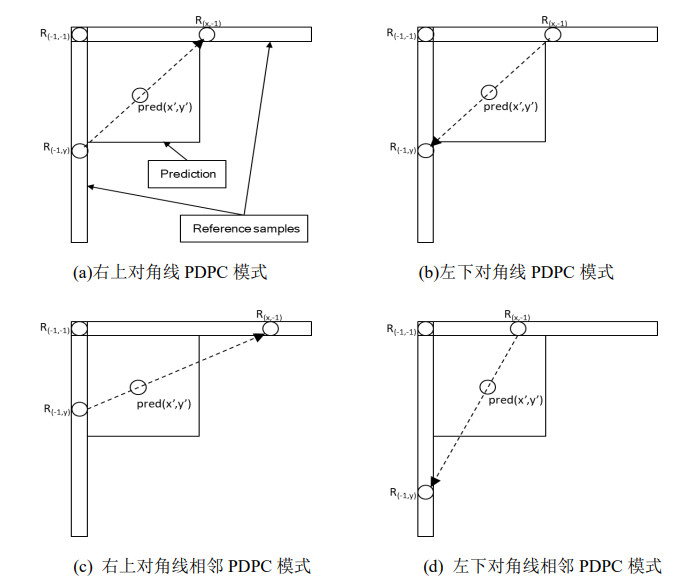
为了使预测像素值与相邻的重构参考像素值之间的边界平滑,并通过对定向 预测像素值提供平面效应来完善预测像素值,在 H.266/VVC 中提出了位置决定 的帧内预测组合技术。根据像素点位置,PDPC 将未滤波的参考像素值和滤波 后的参考线像素预测生成的预测像素值进行线性组合,并参考该线性组合得到当前块的预测像素值。在一般情况下,同一帧图像中像素之间的间隔距离越小,意 味着像素之间存在极强的相关性,通过上述规律,在 PDPC 中将相邻 CU 的参考 像素与当前 CU 的待预测像素之间的间隔距离设为权重,距离离得越近,计算出 来的权重越大,反之,参考像素与待遇测像素的间隔距离越远,计算出来的权重越小。
PDPC 技术应用于大小大于 4×4 的块,以及适用于以下帧内模式:Planar 模 式,DC 模式,水平模式(模式 18),垂直模式(模式 50),左下角模式及其八个 相邻的角度模式(模式 2~10),以及右上角模式及其八个相邻的角度模式(模式 58~66)。
在 PDPC 中,如果使用的帧内模式为 DC,Planar,水平和垂直模式时,则不 需要额外对边界进行平滑滤波,而在 HEVC 中 DC 模式、水平、垂直模式的情况 下,是必须使用边界滤波器。

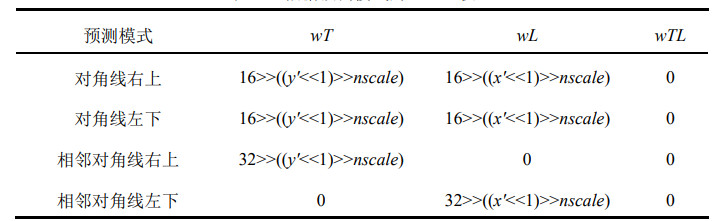
位置决定的帧内预测组合的权重 wT、wL 和 wTL 和比例因子 nscale 根据当 前 CU 的高度和宽度以及当前像素点的位置的变化而变化,表 2-2 显示了权重 wT、wL 和 wTL 的定义,nscale 是由当前块的形状和帧内预测模式共同定义的位 移值,位移值和宽高相关,计算公式如式(2-2)所示。通常,宽高值小则 nscale 为 0,大则 nscale 为 2,多数情况 nscale 为 1。